








一、什么是有刷直流电机
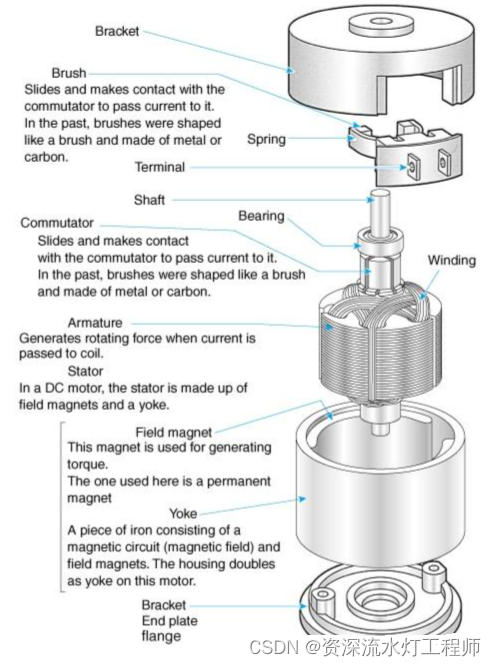
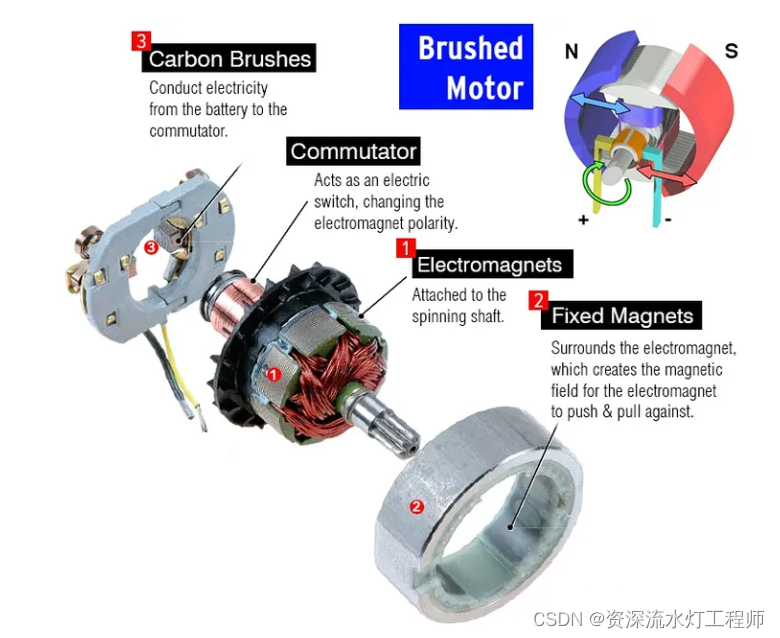
直流有刷电机(Brushed DC Motor),定子是用永磁铁或者线圈做成,以形成固定磁场。在定子一端上有固定碳刷,或者铜刷,负责把外部电流引入转子线圈。而转子是由线圈构成,线圈连接轴端的换相器(Commutator),外部电流通过碳刷和换相器,到达转子线圈。当线圈通电,产生磁场,这个磁场被永磁铁吸引,促使转子转动,转过一定角度后,转子线圈通过机械换相器和碳刷改变电流方向,从而改变磁场方向,保证转子连续转动。
有刷电机使用机械换相器,优点是结构简单,价格低廉,可以提供较高的扭矩,缺点是容易磨损,无法用于洁净室,而且寿命有限,需要定期维护。
有刷直流电机原理动图


二、有刷直流电机的结构图
三、有刷直流电机的励磁方式
根据励磁方式的不同,直流有刷电机,又可以分为单独励磁直流电机,自励磁直流电机和永磁电机。所谓励磁就是定子线圈通电,产生吸引转子的磁场。
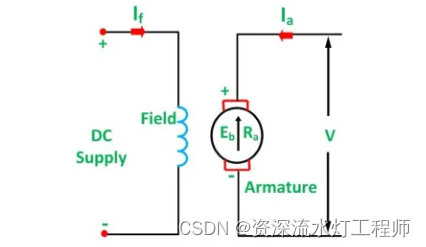
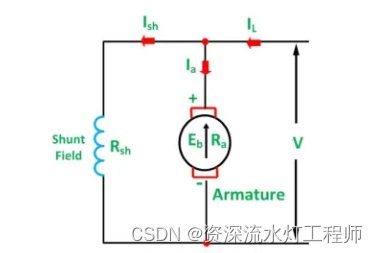
自励磁直流电机,根据绕线方式的不同,还可以继续分为:串联励磁电机,并联励磁电机和复合励磁电机(串联和并联)。
单独励磁直流电机结构简图
并联励磁直流电机结构简图
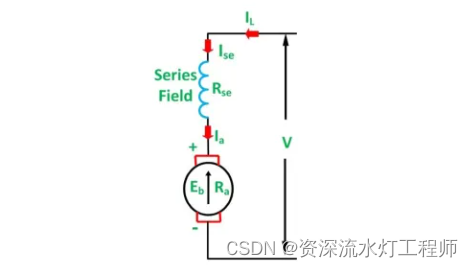
串联励磁直流电机结构简图
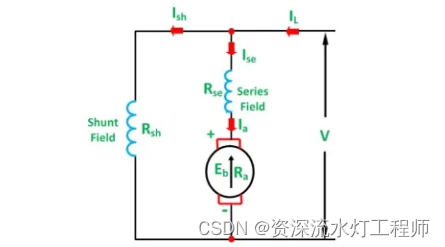
复合励磁直流电机结构简图
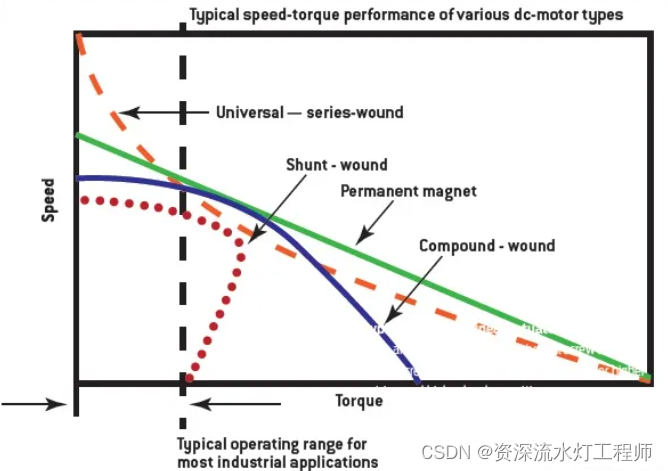
不同直流电机速度扭矩曲线图

















 6040
6040

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









