







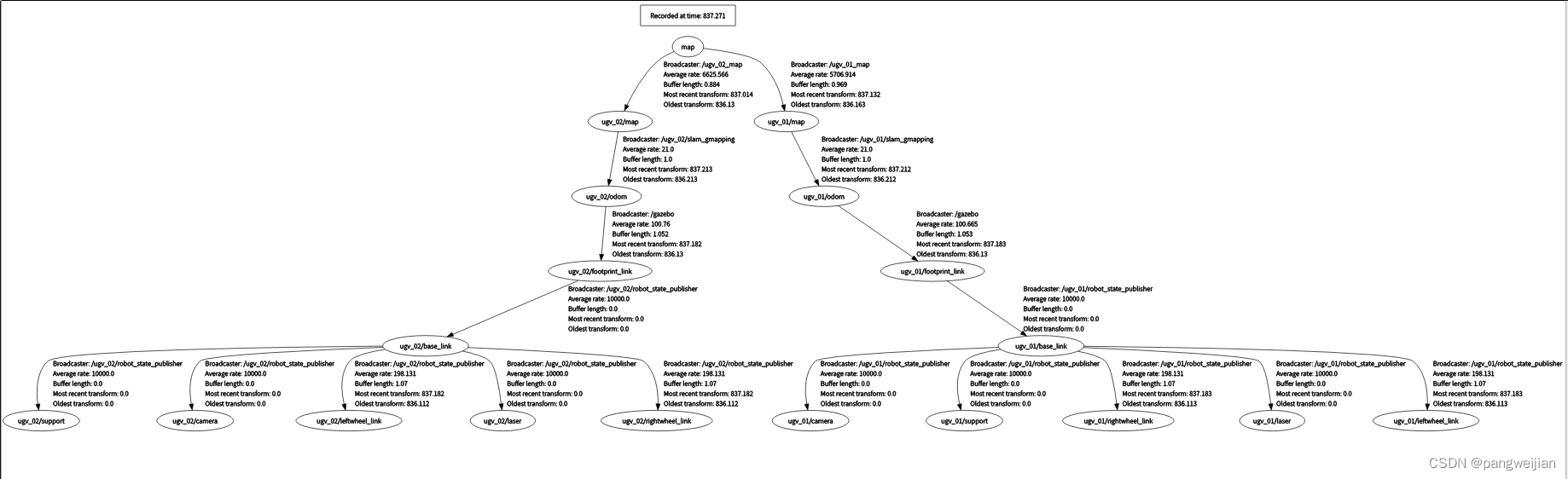

如上边两个图所示,使用rosrun rqt_tf_tree rqt_tf_tree对机器人的TF进行监视,不同的时刻监视得到的链接并不一样,尤其是左右轮,总是有时候会链接到footprint_link上。
另外,使用rviz监视机器人的数据,左右轮的坐标轴会抖动。
这是为什么呢??
可能的原因:
可以看到出错的几个转换矩阵都是gazebo发布的,问题可能出在启动仿真环境的地方。
或者launch文件中加载机器人文件是通过xacro实现的,可能会在解析的过程中出现问题。
不是xacro的原因。
或者是libgazebo_ros_diff_drive.so插件的原因,有时候没有odom话题















 1929
1929











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











