






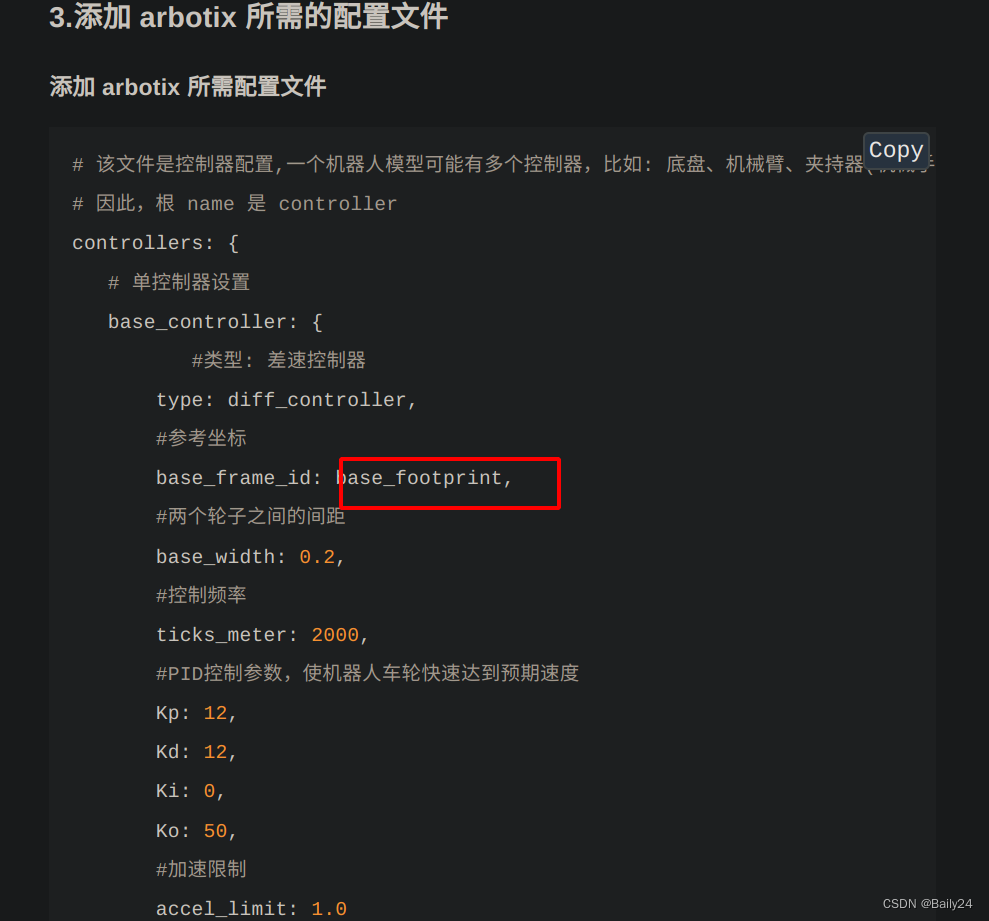
原因:配置文件中的参考坐标不应该是base_footprint,而是你自己小车最下面那个“小脚”的坐标系,我的是footprint。
所以把参考坐标换一下就可以了
















07-12
 1204
1204
1204
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











