引言:为了降低初学者入门无人机的学习成本,超维空间提供了一种基于二维激光+超声波实现室内定位的ROS无人机。基本原理是二维激光通过cartographer自主定位模式实现水平方向的定位,超声波提供高度信息。其中location_to_mavros功能包同时订阅位置个高度信息,通过坐标转换后直接提供给底层飞控实现自主定位。飞控的参数设置直接按照T265的参数设置即可。
注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等
注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等
注意:为了提高的定位效果,建议选择碳纤维或者小一点的机架,塑料的F450机架,从飞行日志看,由于机架太软,会造成无人机的震动非常大,降低整体无人机的整体性能,包括无人机的稳定性等
一、启动雷达+超声波定位程序
roslaunch robot_bringup 2Dlidar_location.launch
未出现报错,表明程序运行正常,地面站检查飞控是否收到定位数据即可
launch文件详解
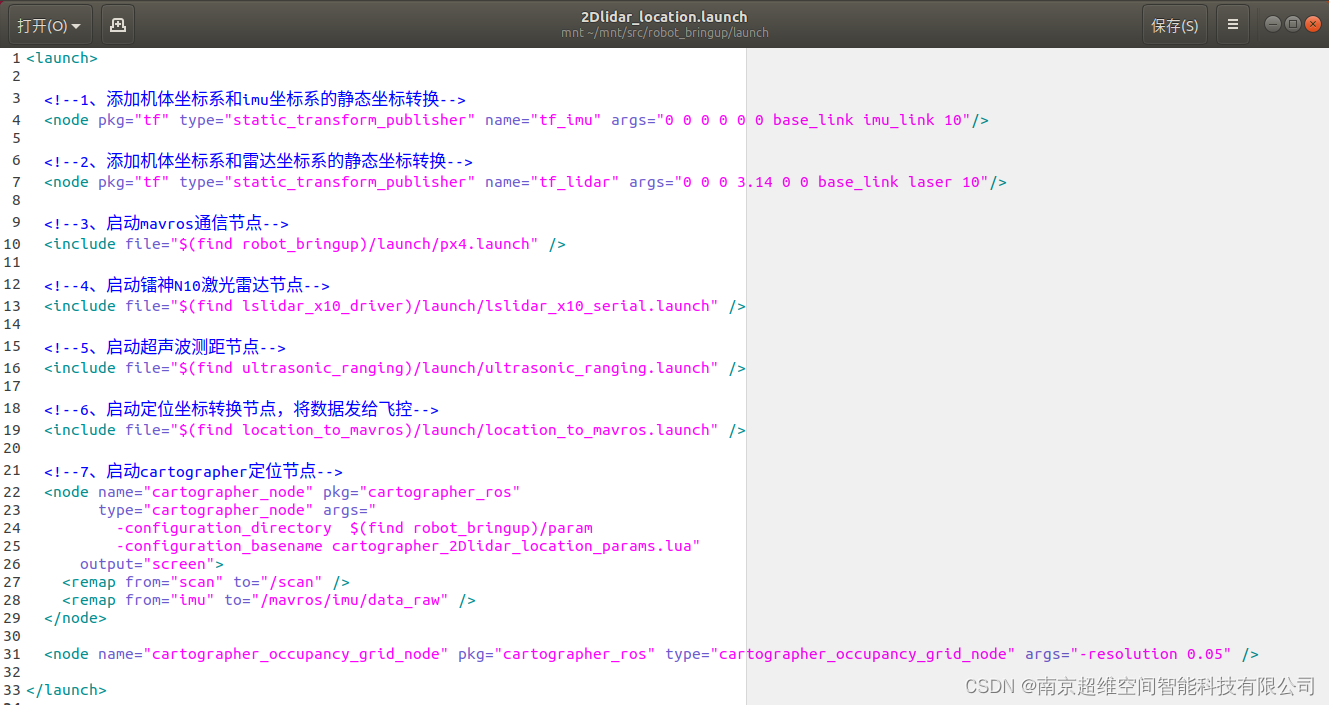
launch文件启动了四个节点,节点作用如下
1、添加机体坐标系和imu坐标系的静态坐标转换
2、添加机体坐标系和雷达坐标系的静态坐标转换
3、启动mavros通信节点
4、启动镭神N10激光雷达节点
5、启动超声波测距节点
6、启动定位坐标转换节点,将数据发给飞控
7、启动cartographer定位节点
二、视频演示
后续补充







 本文介绍了一种利用二维激光和超声波实现低成本的室内无人机定位方法,通过ROS框架结合cartographer和Mavros进行自主定位。文中强调了选择轻质机架如碳纤维对提高定位效果和无人机性能的重要性。
本文介绍了一种利用二维激光和超声波实现低成本的室内无人机定位方法,通过ROS框架结合cartographer和Mavros进行自主定位。文中强调了选择轻质机架如碳纤维对提高定位效果和无人机性能的重要性。


















 431
431

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











