







前言
硬件:单体或双体船
实测视频:
px4无人船航点实验
一、载具设置
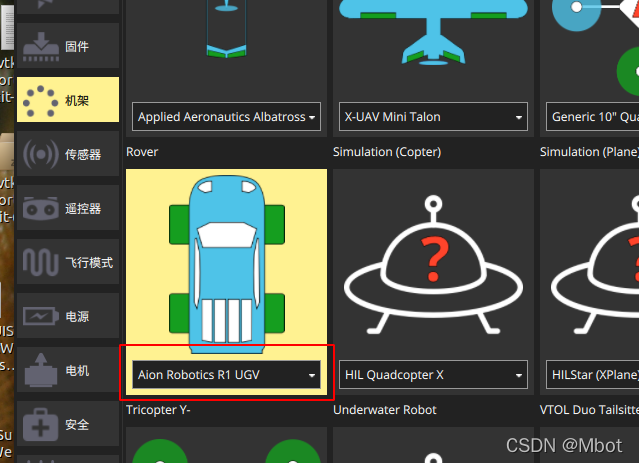
单电机加转向舵设置载具如下:
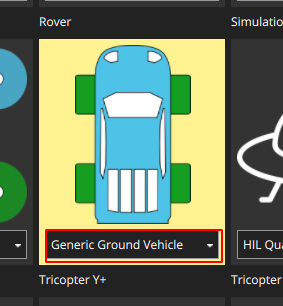
双电机差速船设置载具如下
设置完毕后重新校准传感器
二、电机接线
单电机加舵的船的舵机接主通道2,电机接主通道4
双电机差速船的左边的电机接到主通道一,右边的电机接主通道二.
对于PIXHAWK4是IO PWM OUT(需要用转接板)口,对于其他飞控是MAIN通道
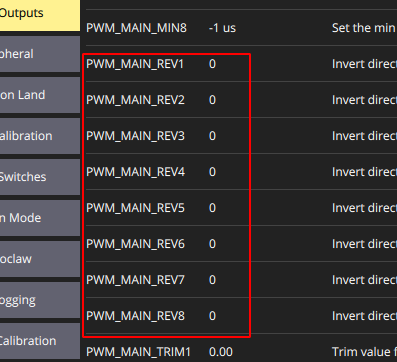
三、PWM输出设置
如果发现舵的转向是反的,可以修改PWM输出使其反向,将需要取反的通道置1并重启飞控即可
最低PWM值参数:PWM_MIN

未解锁PWM值参数:PWM_DISARMED
最大pwm值参数:PWM_MAX

有的电调是固定油门行程的,不支持飞控校准,因此需要根据油门的行程设置PWM参数,比如1000到1500是反转,1500到2000为正转,1500为停止,因此需要将最低的PWM值设置为1000,最大pwm为2000。
四、航点设置
设置起飞点

设置航点

点击上图航点选项,然后在地图上设置航点.设置完航点后,将takeoff点删除
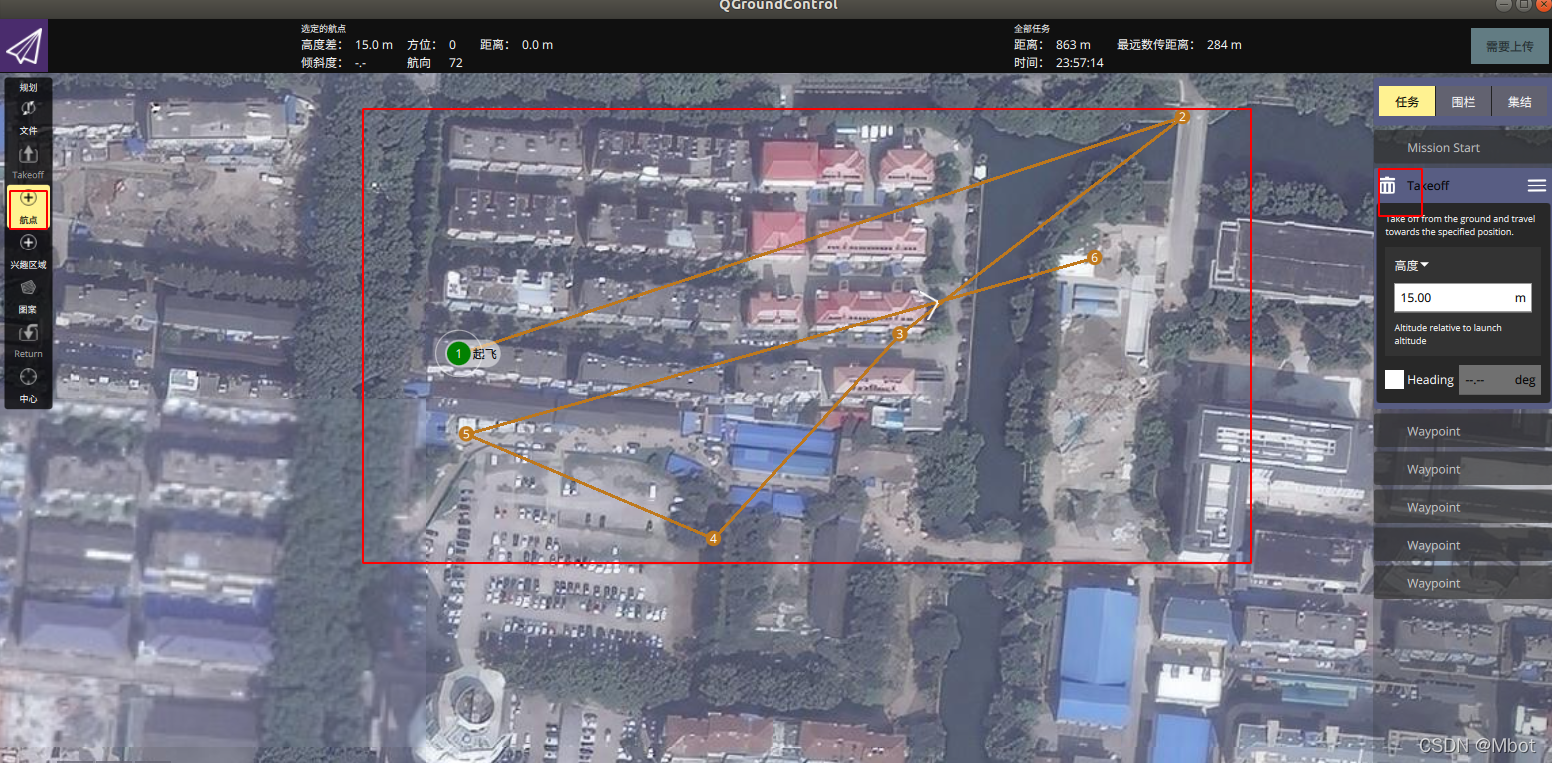
将航点的高度设置为0.然后点"需要上传"按钮将航点上传至无人船就可以了.

或者在地面站->软件设置里面勾选“任务不需要起飞项”,然后就可以不设置起飞点,直接设置航点了


















 5211
5211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











