







 本文详细介绍了PX4飞行控制系统中EKF2模块的工作流程,包括主程序、数据更新、预测状态、GPS融合等多个方面。通过对IMU、GPS数据的处理和融合,EKF2实现对无人机姿态、速度和位置的精准估计。通过对EKF2源码的解读,读者可以深入了解飞行控制系统的传感器融合技术。
本文详细介绍了PX4飞行控制系统中EKF2模块的工作流程,包括主程序、数据更新、预测状态、GPS融合等多个方面。通过对IMU、GPS数据的处理和融合,EKF2实现对无人机姿态、速度和位置的精准估计。通过对EKF2源码的解读,读者可以深入了解飞行控制系统的传感器融合技术。
文章目录
前言
PX4 1.13.2
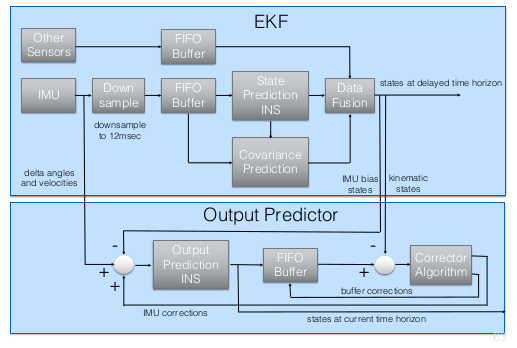
PX4 ekf的传感器数据放在FIFO的环形缓冲区中,每次融合时取最新的数据,融合出的bias直接给输出滤波器,补偿到IMU的数据中,同时EKF融合出的位置速度等数据也要给输出滤波器,根据延时经过补偿输出当前时间线下的状态。
一、主程序
代码位置
void EKF2::Run()
{
是否退出
if (should_exit()) {
_sensor_combined_sub.unregisterCallback();
_vehicle_imu_sub.unregisterCallback();
return;
}
更新参数
if (_parameter_update_sub.updated() || !_callback_registered) {
// clear update
param
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1589
1589

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











