







 本文详细介绍了如何对Pix2.4.8250穿越机进行固件升级,包括使用QGC或MP刷固件,设置机架,校准遥控器和传感器,以及配置遥控开关和电机输出协议DShot。此外,还强调了在不同步骤中应注意的事项,如不接电池进行校准和设置后的重启要求。
本文详细介绍了如何对Pix2.4.8250穿越机进行固件升级,包括使用QGC或MP刷固件,设置机架,校准遥控器和传感器,以及配置遥控开关和电机输出协议DShot。此外,还强调了在不同步骤中应注意的事项,如不接电池进行校准和设置后的重启要求。
前言
硬件:
pix6C
QAV250四轴
云卓T10遥控
软件:
APM copter4.3.7
QGC最新版
参考:https://ardupilot.org/copter/docs/configuring-hardware.html
一、接线
GPS接gps和i2c口,接收机的p/s口接飞控RCIN,接收机的数传口接telem1
电机的顺序和转向如下图所示:
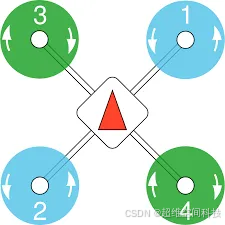
对应电机的电调信号线接飞控的相应输出通道上,我这里设置的是FMU的1到4
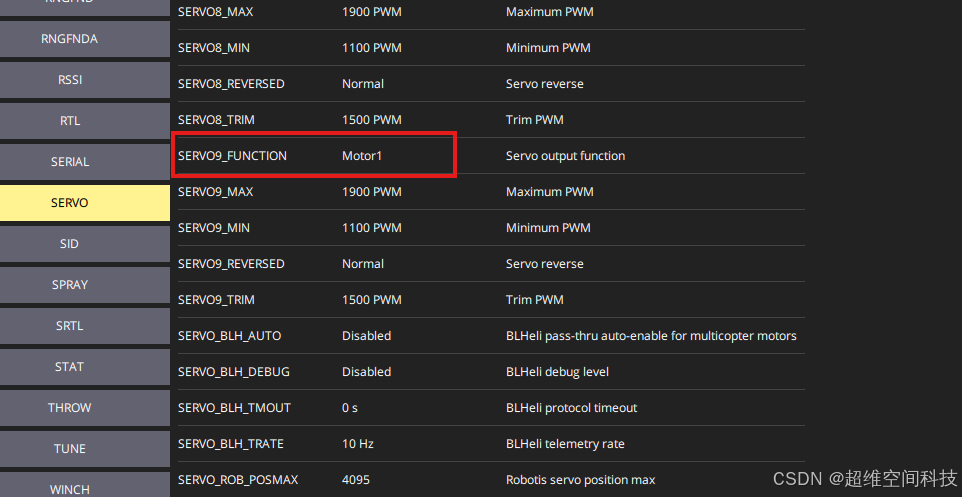
AUX的1到4对应的是SERVO9到SERVO12
需要设置SERVO9到SERVO12的功能为Motor1到Motor4
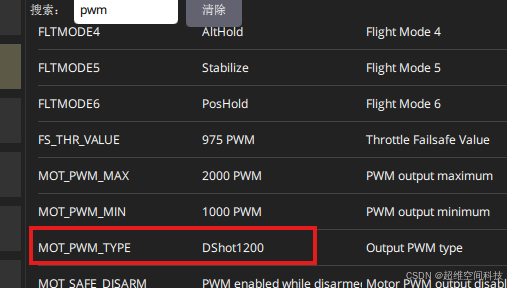
电调的协议改成Dshot1200
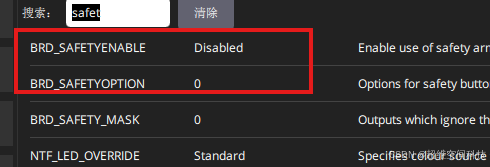
如果飞控没有接安全开关的话,可以把安全开关禁用,否则飞控会不输出驱动信号
二、刷固件
刷固件可以使用在线或离线下载两种方式,选择其中一种下载即可,推荐使用离线下载。
刷固件我这里使用的是qgc(也可以用mp)。
1,在线下载
切到下面页面,然后插上飞控(飞机不要接电池)

插上后设置如下,然后点确定下载固件

下载完后如下:

2,离线下载
先在APM的固件下载网站下载固件的可执行文件:
https://firmware.ardupilot.org/
选择Copter
可以下载最新稳定版
选择fmuv3
下载apj文件
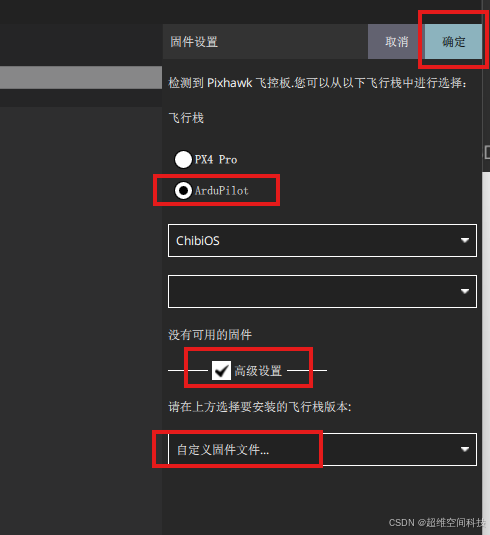
切到下面页面,然后插上飞控(飞机不要接电池)
选择ArduPilot,勾选高级设置,选择自定义固件文件,然后点击确定
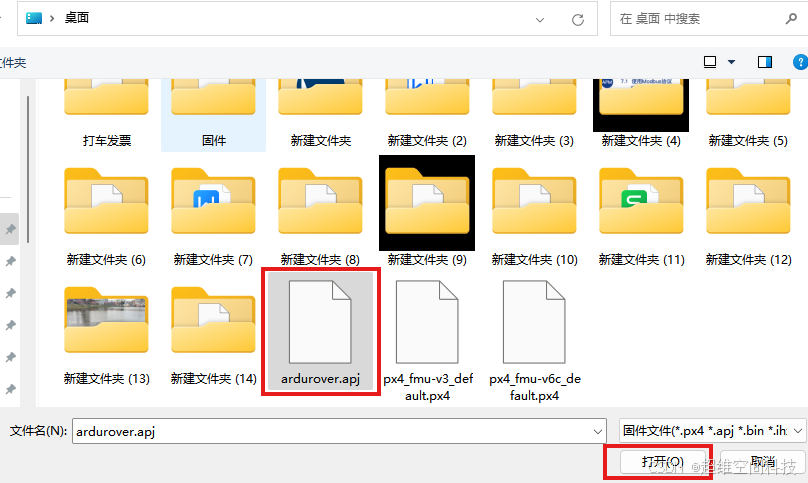
然后选择上面下载的apj文件即可自动下载到飞控
三、设置机架
设置如下:

四、校准遥控器
点击下图的校准,然后按提示拨动摇杆即可,校准时不要接电池

五、设置遥控开关
在下图设置遥控的拨码开关,设置一个切模式开关,我这里设置成自稳定高定点。再设置一个解锁开关和刹车开关(刹车开关如果在空中使用,飞机将自由落体),设置完后需重启飞控才能生效,4.2以上版本的固件需要手动设置解锁开关的值为153.

六、校准传感器
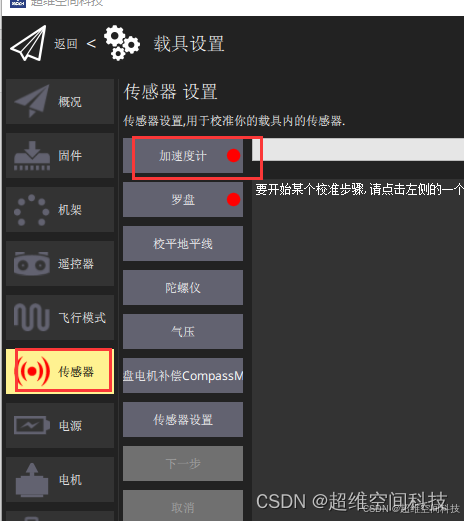
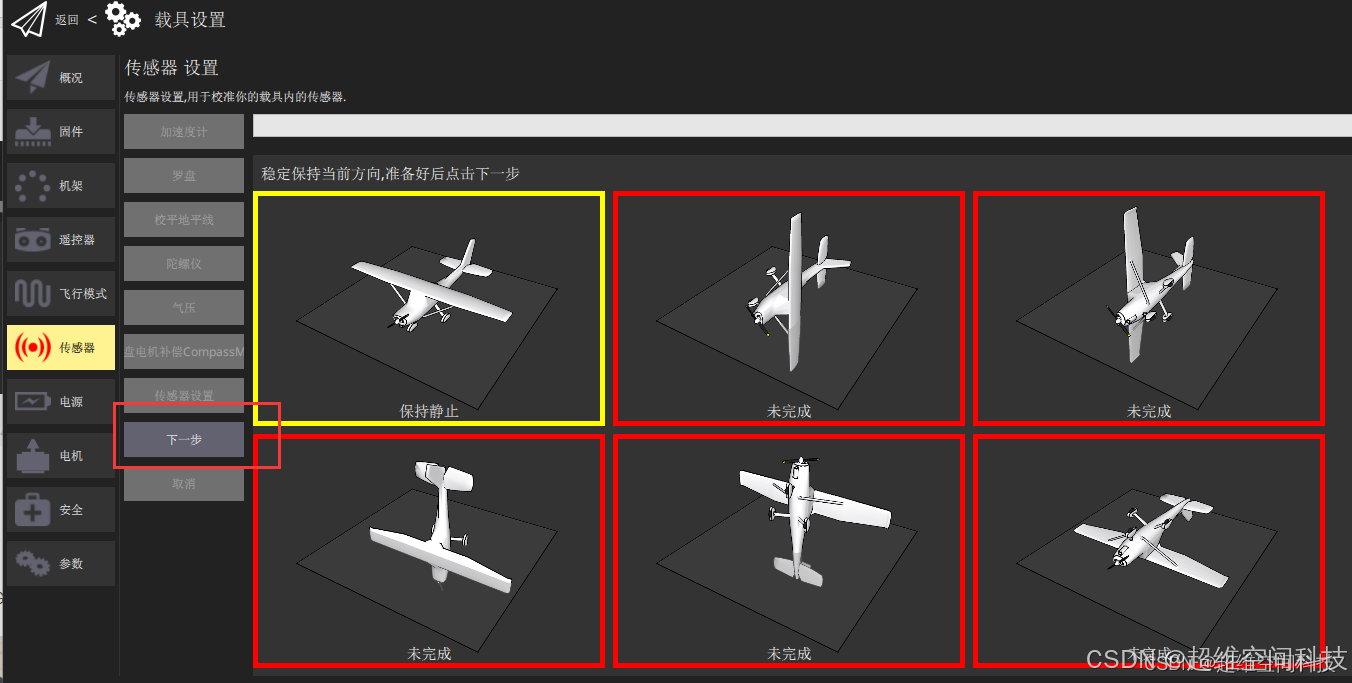
1、校准加速度计
点击左上角软件图标-》载具设置-》传感器-》加速度计
飞控方向默认为None即可,点击确定
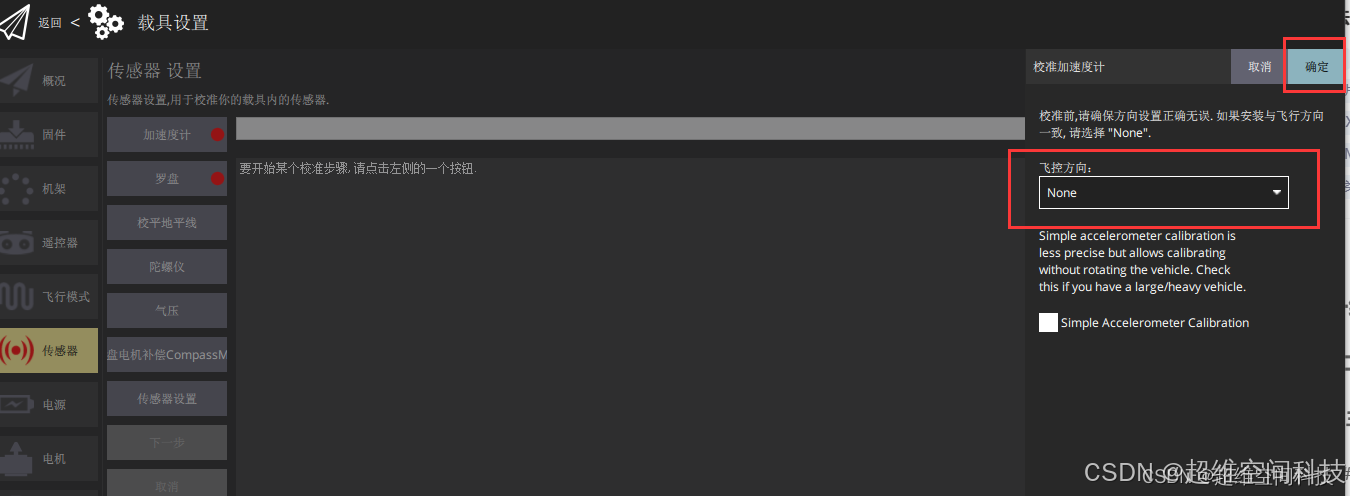
点击确定后,地面的水平面图标会变成黄色,此时将飞控保持水平静止。然后点击下一步。
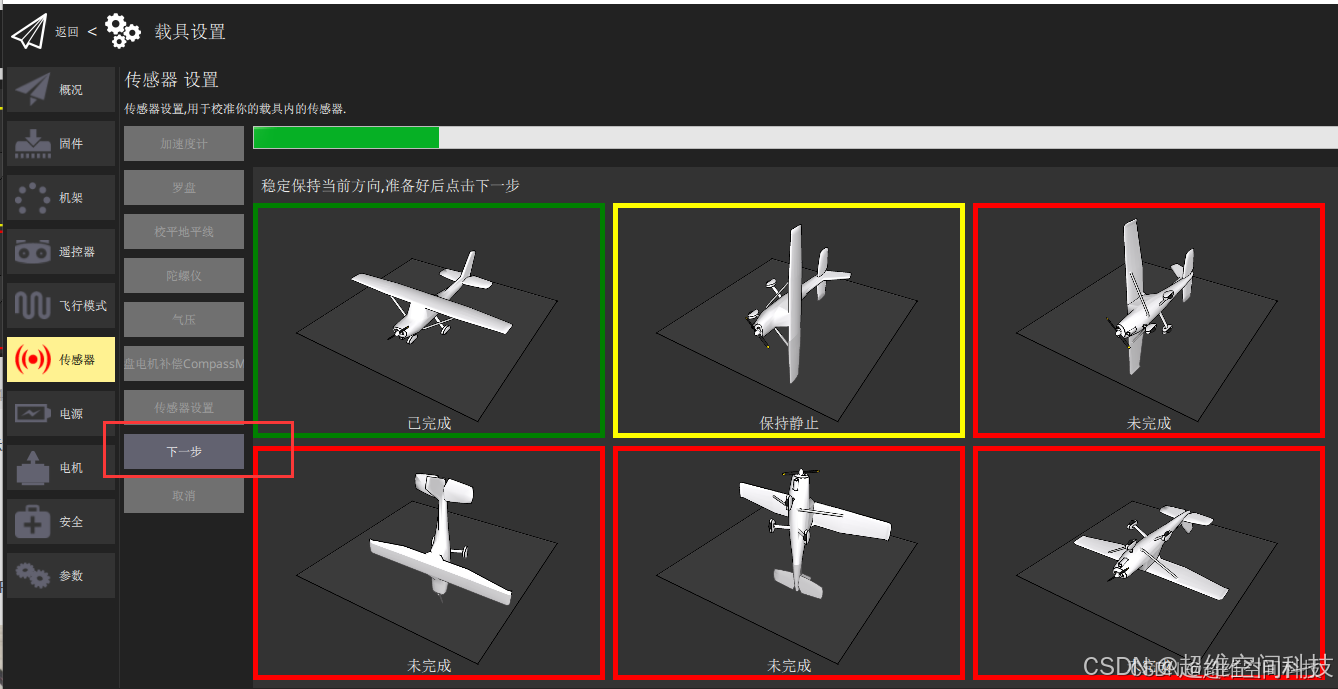
点击完后水平面图标会变成绿色,表示水平面已校准完成。同时地面站的另一个面会变成黄色,然后再将飞控保持根据提示的面保持静止并点击下一步即可,直到六个面都教程完成、
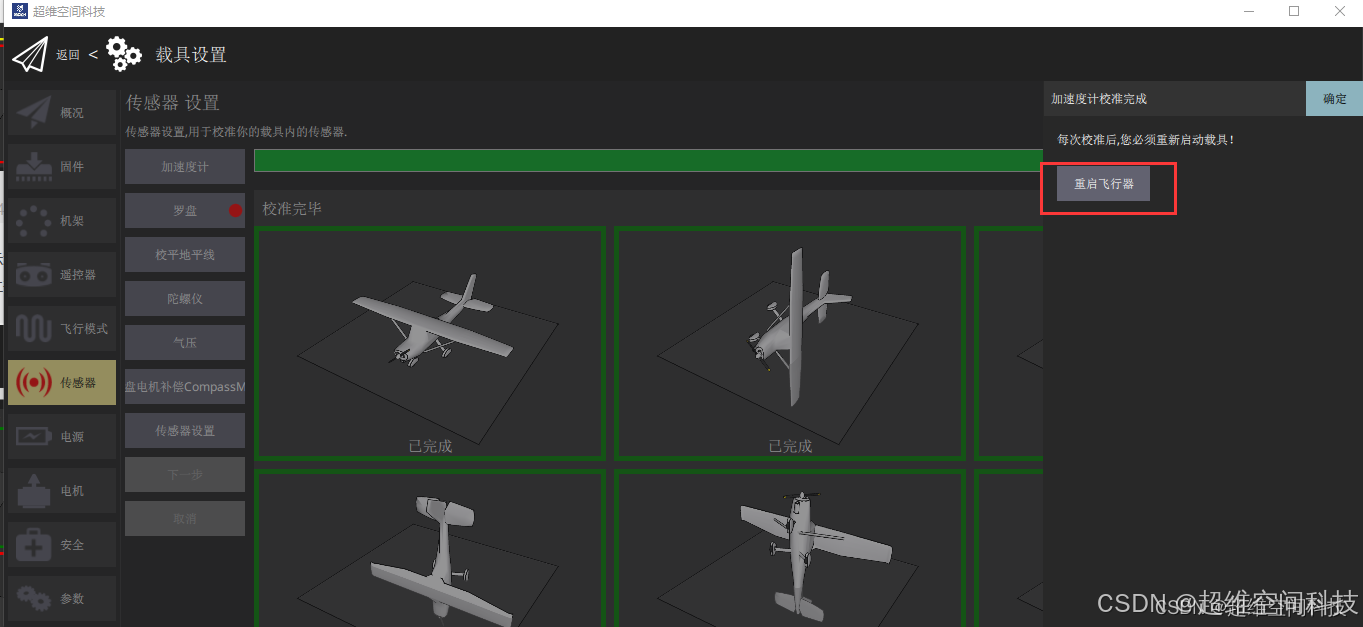
都校准完后,会提示重启飞行器,点击重启即可。
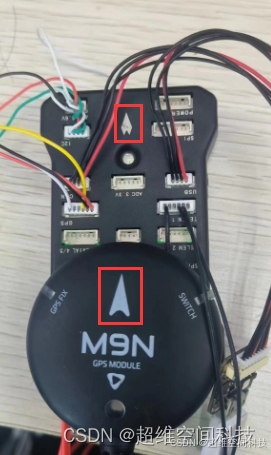
2、校准罗盘
校准罗盘前,确保飞控罗盘的方向与GPS罗盘的方向一致
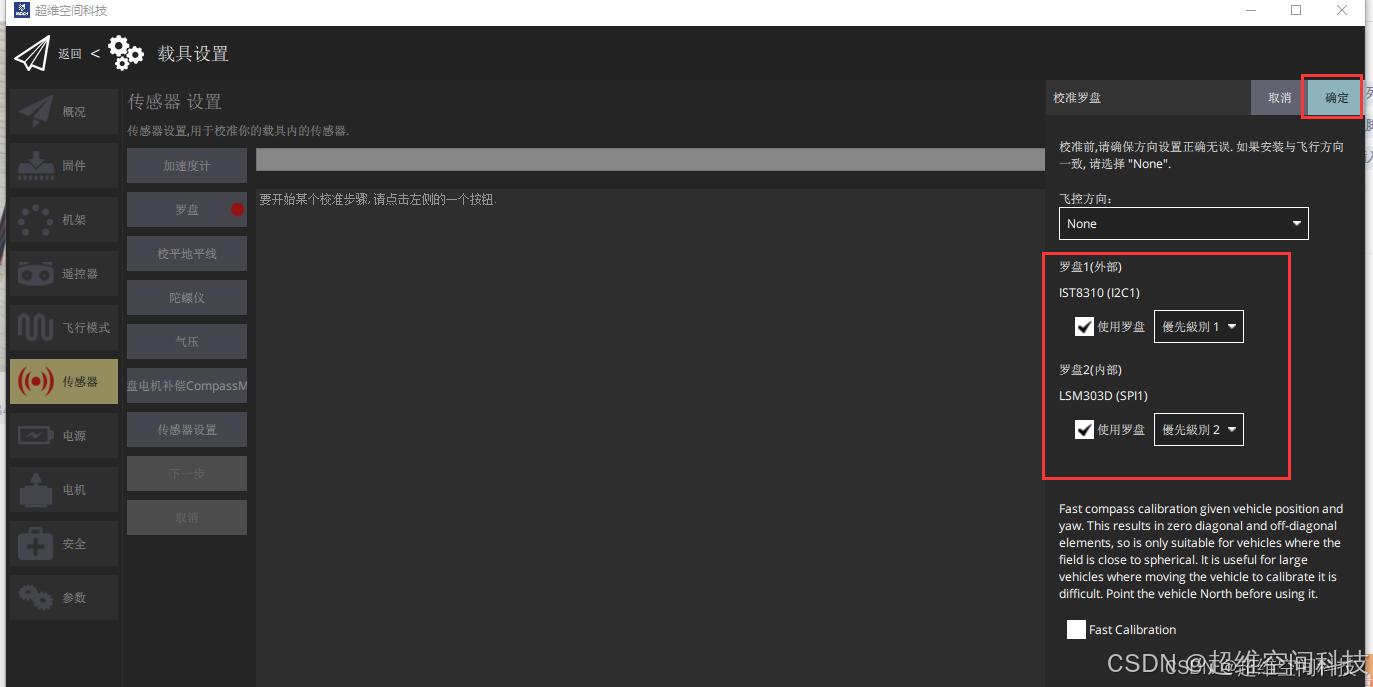
点击左上角软件图标-》载具设置-》传感器-》罗盘
会出现下面提示,设置罗盘优先级,一般设置外置罗盘的优先级为最高,然后点击确定
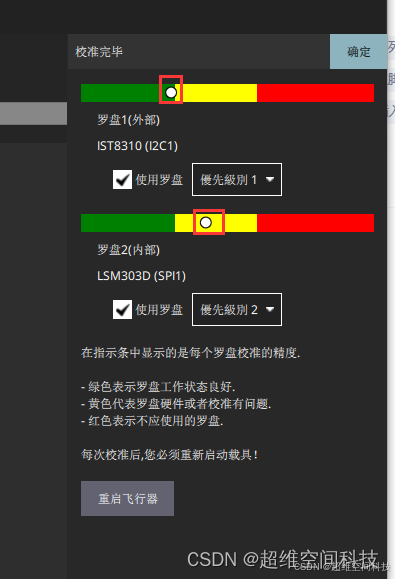
然后往各个方向不断的旋转飞控,直到上方绿色进度条满即可。校准完成后,会弹出下面的提示
如果有罗盘的精度在红色区域,需要将其禁用。没问题的话重启飞行器即可。
3、校准陀螺仪
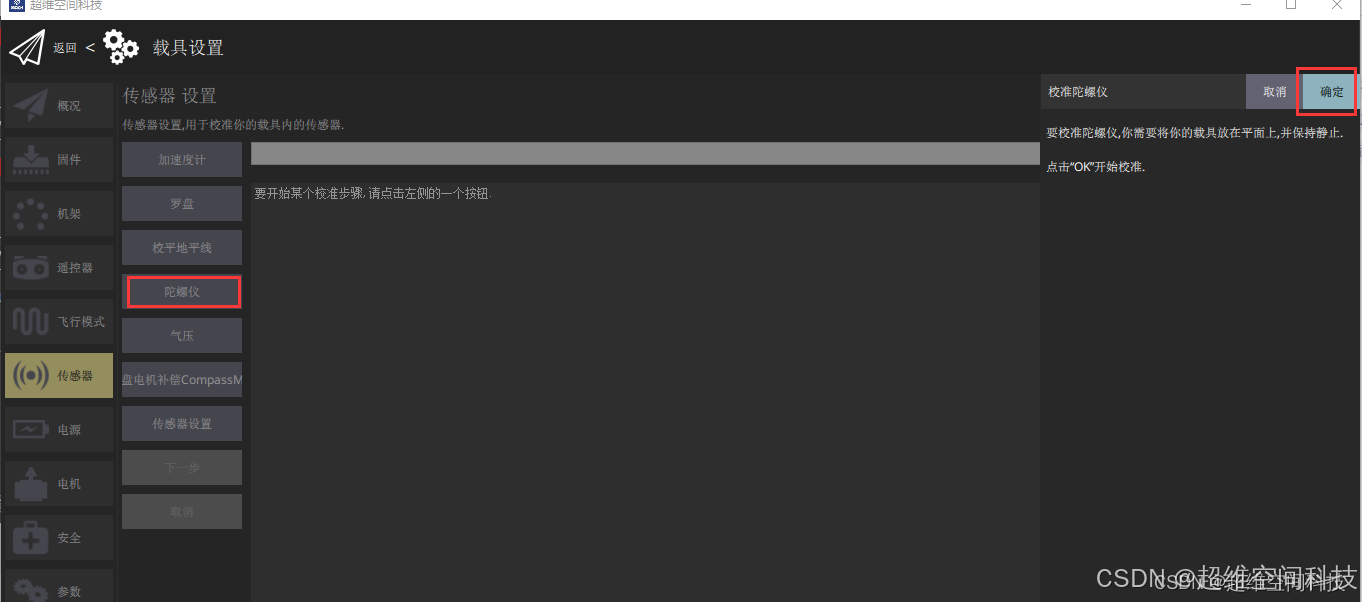
点击左上角软件图标-》载具设置-》传感器-》陀螺仪
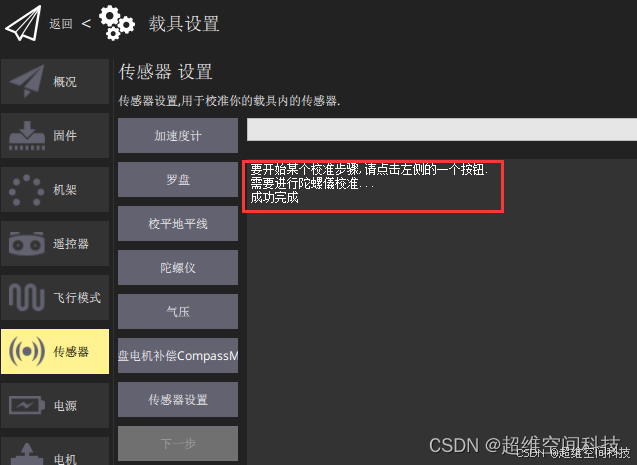
出现下面的提示就表示校准完成
4、校平地平线
点击左上角软件图标-》载具设置-》传感器-》校平地平线
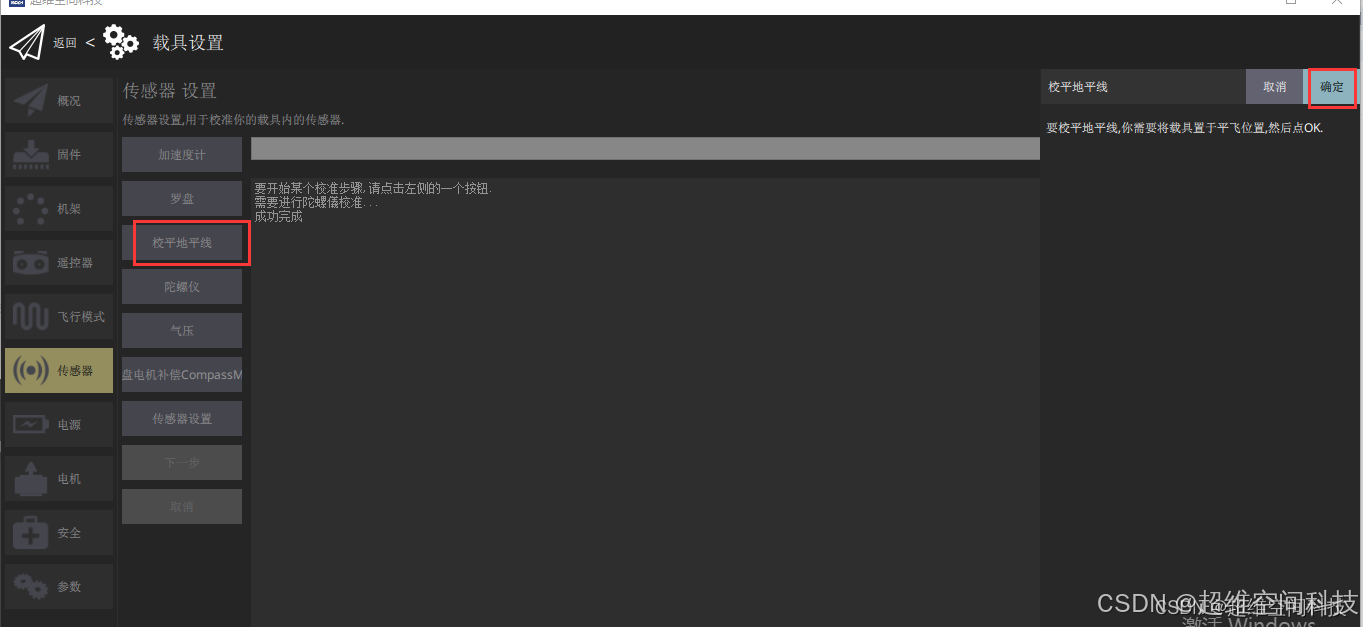
出现下面的提示就表示校准完成

经过上面的配置,无人机就可以装上桨叶试飞了。务必检查电机和桨叶不要装反
七、其他参数设置
如果解锁失败报错的话,可以把解锁检查关掉,ARM_CHECK改成0。


















 4016
4016

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











