







前言
固件版本:Copter 4.5.7
地面站:QGC
遥控器:云卓T10
飞控:山鹰H743
GPS:微空M9
这个飞控的原理图是开源的,网盘链接:
通过百度网盘分享的文件:山鹰飞控
链接:https://pan.baidu.com/s/1Lg0vrvHtYCdlVC8u4strzg?pwd=nb0y
提取码:nb0y
–来自百度网盘超级会员V7的分享
调试好的飞控参数:
通过百度网盘分享的文件:山鹰飞控四旋翼
链接:https://pan.baidu.com/s/1JLdok6GUSMlk1VvjsMaoZw?pwd=5hqk
提取码:5hqk
–来自百度网盘超级会员V7的分享
一、飞控说明书
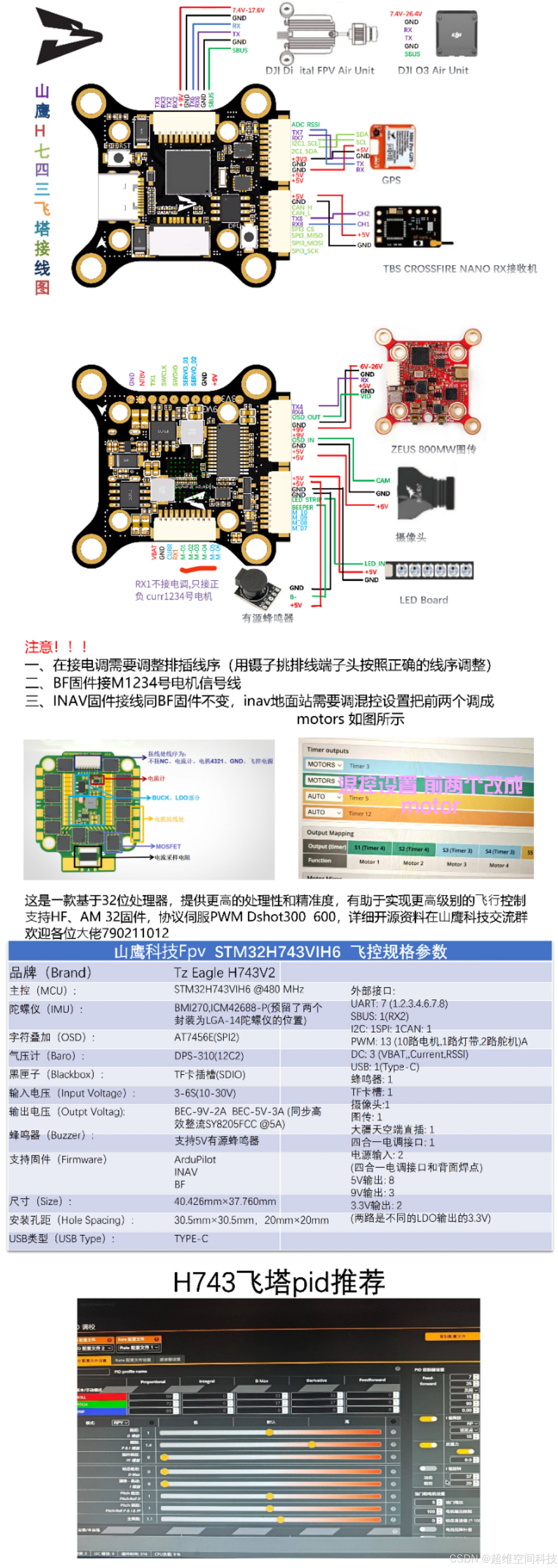
二、接线
这个飞控的subs口和串口6在apm固件下是用不了的,所以接收机的信号线接rx8,然后将serial7(对应的就是串口8)设置成遥控输入。将波特率手动输入成100,协议设置成RCIN

将串口7用作GPS口,scl和sda接罗盘,serial6(对应串口7)设置为GPS输入,gps_type设置为AUTO


串口4用作mavlink数传口,波特率设置为57600。
三、参数设置
山鹰飞控使用apm固件时最高只能支持dshot300协议,设置如下:

pwm参数就用默认的就行
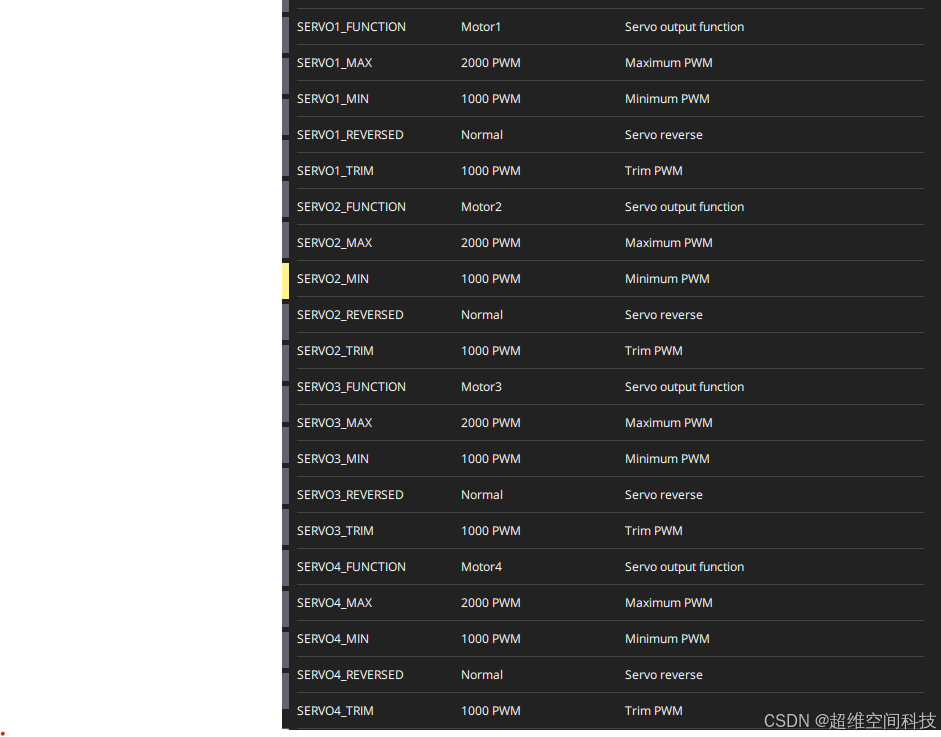
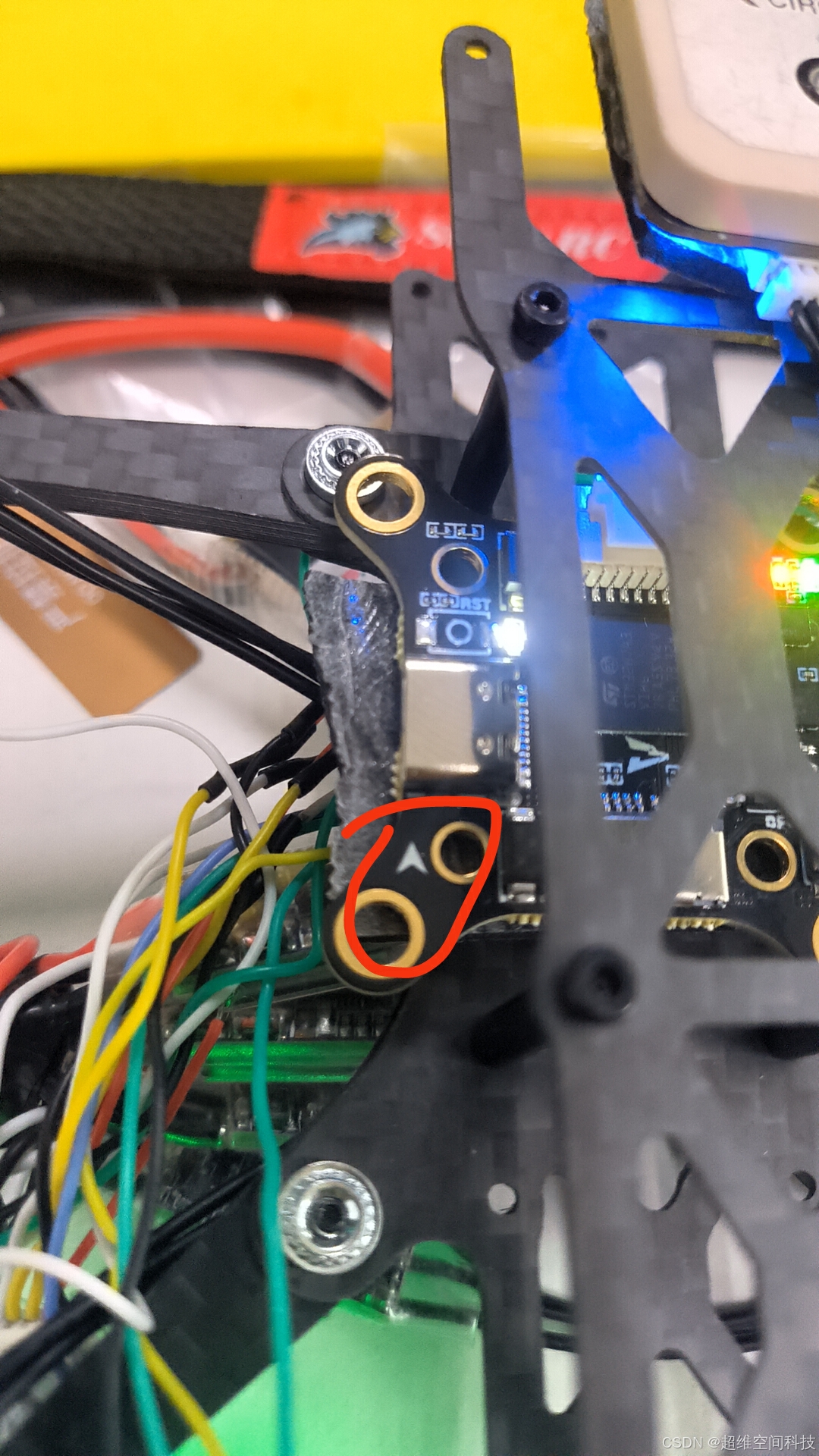
四、电机接线和转向
飞控的方向如下:
电机接线顺序如下:
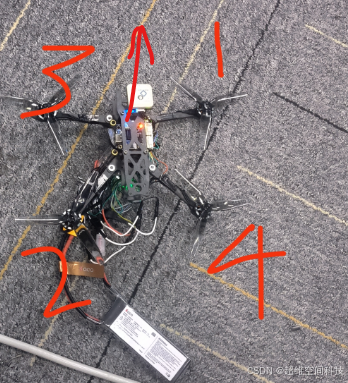
电机转向如下:



















 4033
4033

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











