







写在前面
偶然翻到一个华硕 ASUS Xtion pro live 相机,索性拿来跑一跑测试一下。
测试环境 ubuntu 16.04 、ROS Kinetic。
华硕 ASUS Xtion pro live 相机,可以产生 RGBD 信息。

一、安装库
首先安装相应的库
sudo apt-get install ros-kinetic-openni-camera
sudo apt-get install ros-kinetic-openni-launch
二、运行launch文件
运行 openi 驱动 的 launch 文件
roslaunch openni_launch openni.launch
如果出现报错USB interface is not supported!:
则先执行
sudo apt-get install libopenni-dev libopenni-sensor-primesense-dev
然后再次执行上述launch文件。
如果还是不行,请执行下面命令
dpkg -l|grep openni
rosdep install –from-path -s –reinstall
env|grep ros
执行完上述命令后,再次执行上述launch文件,如果还是会出现这个问题,那就拔插一下usb线。
三、运行 rviz 查看显示效果
rosrun rviz rviz
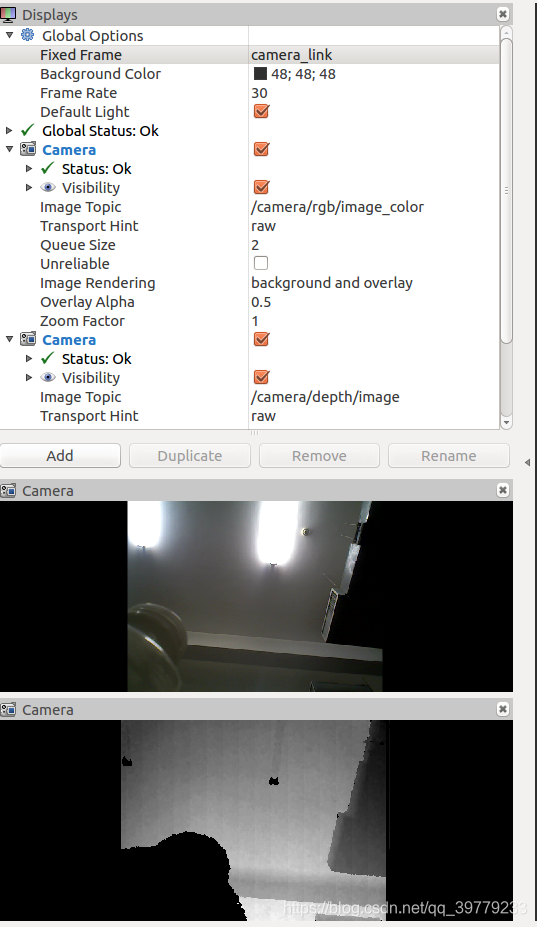
然后修改 “Fixed Frame” 为 camera_link, 并且添加 话题 /camera/rgb/image_color 就可以看到实时RGB图像,添加 话题 /camera/depth/image 就可以看到实时深度图像。还可以添加其他 话题 显示其他话题。
然后就可以看到如下效果啦~~
参考链接
[1] lvzhiyu1206. ROS下基于OpenNI使用rgbd camera(华硕Xtion pro live) [EB/OL]. https://blog.csdn.net/weixin_39272225/article/details/79886805, 2018-04-10/2021-06-08.
[2] 杰径通幽. 华硕Xtion Pro Live驱动安装与骨骼跟踪 [EB/OL]. https://blog.csdn.net/jackkang01/article/details/86568506, 2019-01-21/2021-06-08.
[3] ImportSUC. ROS 运行 openni_tracker 出现 USB interface is not supported! [EB/OL]. https://blog.csdn.net/yiranhaiziqi/article/details/52957518, 2016-11-09/2021-06-08.

















 5298
5298

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









