







 本文介绍AVP自动泊车系统,其架构由车辆、场端、云端子系统和用户APP构成。阐述各子系统功能,如云端可管理用户信息、提供泊车服务等。还说明了系统工作流程,包括车位查询、泊车、取车等,以及各环节基础数据交互的工作流程、技术和数据交互要求。
本文介绍AVP自动泊车系统,其架构由车辆、场端、云端子系统和用户APP构成。阐述各子系统功能,如云端可管理用户信息、提供泊车服务等。还说明了系统工作流程,包括车位查询、泊车、取车等,以及各环节基础数据交互的工作流程、技术和数据交互要求。
系统架构
用户在指定下客点下车,通过终端APP下达泊车指令,车辆在接收到指令后可自动行驶到停车场的停车位,不需要用户操纵和监控;用户通过APP下达取车指令,车辆在接收到指令后可以从停车位自动行驶到指定上客点;若多辆车同时收到泊车/取车指令,可实现多车动态的自动等待进入泊车/取车位。车辆自动行驶过程中应能遵守道路交通规则,或停车场运营方所制定的场内交通规则。AVP功能的系统架构可参考如下:
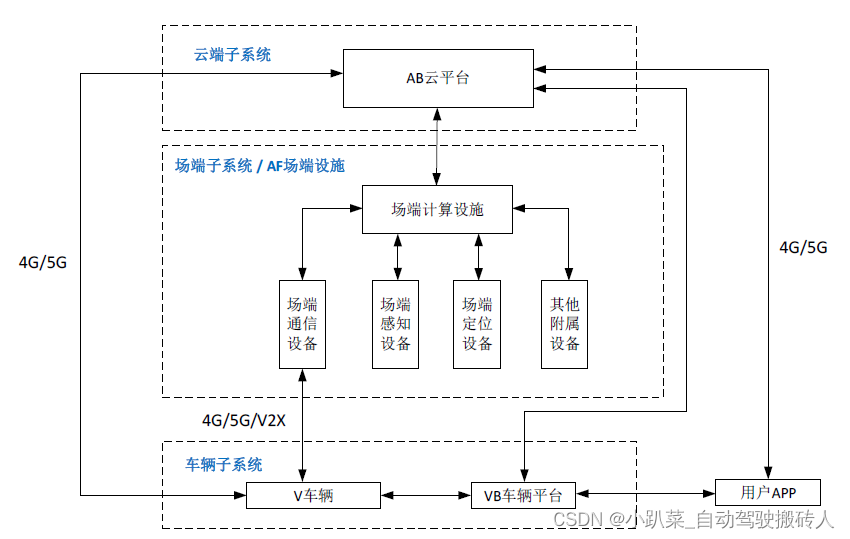
AVP 系统架构主要由以下四个主要部分构成:
1. 车辆子系统:由AVP 车辆(Vehicle)和OEM 云平台(Vehicle Backend)构成,其中AVP 车辆包括OBU、车载计算控制模块、车载网关、路由器等;
2. 场端子系统:也称为场端设施(AVP Facility),主要包括场端通信设施、路侧感知设施、路侧计算设施等,也包括用于定位和场端车位管理的各类设备设施;
3. 云端子系统:主要包括AVP 云平台(AVP Backend),具备停车场设备管理、地图管理、远程服务、业务支撑和数据存储和分析等服务;
4. 用户APP:用户与其他子系统进行交互的人机交互界面。
系统功能描述
云端子系统
云端子系统主要包括AVP云平台(AB),其中AVP云平台的主要功能如下:
1. 用户信息管理:具备管理用户的注册、鉴权和身份认证等信息;
2. 用户服务请求管理:具备接收用户请求并处理反馈请求的能力,例如为用户提供停车位信息、为用户分配车位、全局路径规划等;
3. 场端信息查询和管理:具备查询和管理场端信息的能力,如设备基本信息、设备运行状态、场端车位分配信息等;
4. 场端设备运维管理:管理停车场内设备的当前版本和运行状态等,提供设备运维服务;
5. 场端服务请求管理:具备接收场端信息并处理场端服务请求的能力;
6. 自动泊车应用服务:接收自动驾驶车辆的运行信息,监控车辆运行状态,提供自主代客泊车应用服务所需要的支撑服务,以及特殊情况的及时处理等;
7. 为第三方应用服务平台或系统提供数据或开放接口服务:包括但不限于地图服务平台、OEM平台等
8. 数据处理:支持各类数据的采集、处理、分析和存储等服务。
9. 停车场地图管理:为系统提供场内地图、实时导航以及场内全局路径规划等服务。
车辆子系统
车辆子系统包括车辆(V)和OEM云平台(VB)。
其中车辆的主要功能如下:
1. L2+的自动驾驶功能:具备线控和车辆运动执行能力,其他扩展能力包括自身感知、决策规划和运动控制等能力;
2. 服务请求和数据处理:车端需要具备向场端和云端发送服务请求,以及接收服务响应数据并进行处理的能力。
OEM云平台的主要功能如下:
1. 收集和管理车辆数据:具备车辆信息管理、数据下发的能力;
2. 为云端开放接口和数据交互:为 AVP云平台提供数据接口,具备与云平台进行数据交互的能力;
3. 接收并响应用户服务请求:具备响应用户APP 服务请求的能力。
场端子系统
场端子系统由场端设施(AF)组成,主要功能如下:
1. 场端环境感知:提供停车场内障碍物与事件的感知能力,对停车场环境进行实时监测;
2. V2X服务:为场内自动驾驶车辆提供支撑服务,包括V2X消息的接收、解析、处理和发送等操作;
3. 场内定位:为场内自动驾驶车辆提供定位服务;
4. 场端路径规划:具备为场端用户提供场内局部路径规划的能力;
5. ODD状态检查:具备场内运行环境状态检查的能力,包括但不限于场内专用标识、灯光、障碍物、设备运行状态等的检测;
6. 特殊工况处理:具备特殊工况的处理能力,必要时通知人工维护和接管;
7. 场内设备的状态监测与运维管理:监测场端各类设备的运行状态和运行性能数据,对场端设施的运行状态和运行性能进行监控管理。
用户APP
用户APP子系统主要指手机APP,也可指车载APP,两种类型的功能基本一致,但是手机APP可以发起异地取车请求,车载APP不行。用户APP主要功能如下:
1. 请求服务:向云端发送车位预约、一键泊车、取车等服务请求;
2. 接收并处理服务响应信息:具备接收云端服务响应并进行数据处理和显示的能力。
工作流程
系统总体工作流程包括查询和预约车位、一键泊车、车辆运行(进场)、一键取车、车辆运行(退场)和用户接管,如下图所示:
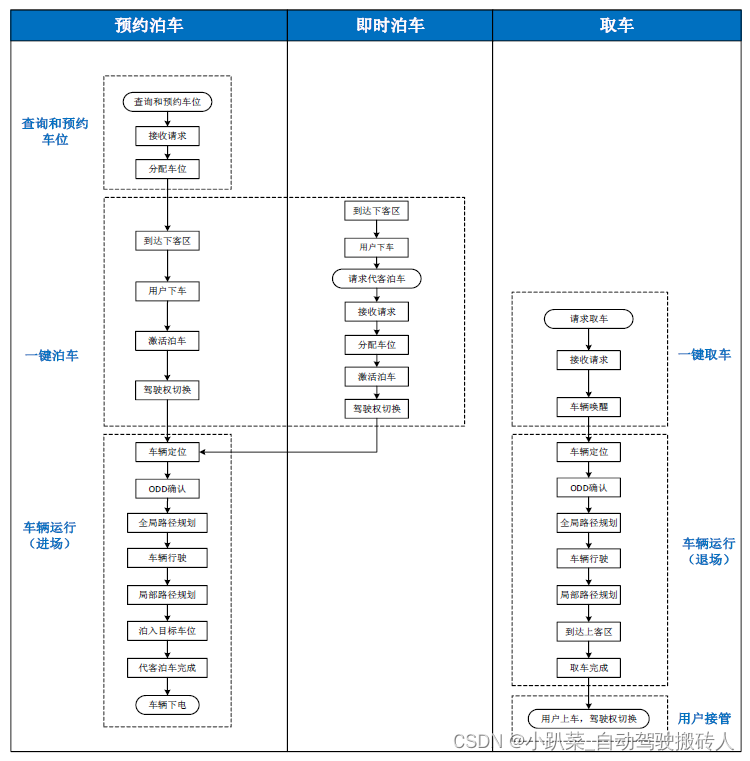
各个子流程的内容如下:
1. 查询和预约车位:用户向系统的管理控制单元发送车位查询和预约请求,系统为用户提供停车场、停车位信息及分配车位。
2. 一键泊车:车辆到达指定停车场后,通过明确的用户指令和交互认证,将驾驶权由用户转交给系统。
3. 车辆运行(进场):用户移交驾驶权之后,车辆驾驶到对应的停车位,整个运行过程为自动驾驶。如果云平台接收到多个泊车请求,则由云平台进行统一调度。
4. 一键取车:用户发起取车请求后,通过明确的用户指令和交互认证,车辆将启动并自动驾驶到相应的取车区域。
5. 车辆运行(退场):完成交互认证之后,车辆被唤醒并运行至取车区域,整个运行过程为自动驾驶。如果云平台接收到多个取车请求,则由云平台进行统一调度。
6. 用户接管:车辆到达指定取车区域后,通过明确的用户指令和交互认证,将驾驶权由系统转交
给用户。
基础数据交互内容
AVP 系统基础数据交互服务
通过上文的系统基础工作流程的描述,结合对各子系统间数据交互需求的分析,可以抽象出12种基础数据交互服务。如下表所示,表中列出了每项基础服务对应的数据发送端和接收端,以及接收端接收到信息之后是否需要反馈,且同时总结了每种基础服务对应的交互类型。对于各子系统之间的通信方式和通信链路,可根据OEM自身定义进行规范。
| AVP系统基础数据交互服务 | |||||
|---|---|---|---|---|---|
| AB:云平台; AF:场端(包含场端服务器/边缘云); V:车辆; VB:OEM 云平台; APP:用户 | |||||
| 序号 | 基础服务 | 请求端 | 响应端 | 是否响应 | 交互类型 |
| 1 | 车位查询 | V/APP | AB | Y | 车/用户 - 云 |
| 2 | 车位预约 | V/APP | AB | Y | 车/用户 - 云 |
| 3 | 取消预约 | V/APP | AB | Y | 车/用户 - 云 |
| 4 | 泊车请求 | V/APP | AB | Y | 车/用户 - 云 |
| 5 | 场内高精度定位 | V | AF | Y | 车 - 场 |
| 6 | 场端全局路径规划 | V | AF | Y | 车 - 场 |
| 7 | 场端局部路径规划 | V | AF | Y | 车 - 场 |
| 8 | 场端感知信息共享 | V | AF | Y | 车 - 场 |
| 9 | 取车请求 | V/APP | AB | Y | 车/用户 - 云 |
| 10 | 车辆唤醒 | AB | VB&V | Y | 云 - 车 |
| 11 | 取车控制权切换 | AB | VB&V | Y | 云 - 车 |
| 12 | 场端设施 - 云平台数据交换 | AF/AB | AB/AF | Y/N | 场 - 云 |
车/用户 - 云基础数据交互内容
车位查询
工作流程
车位查询服务的基本工作流程如下:
1. 用户打开车端或手机端自主代客泊车APP,注册个人信息并登录;
2. 用户输入车辆信息,通过APP搜索附近可用停车场,选择停车场并查询可用车位;
3. 若有可用车位,用户可进行预约或退出服务;
4. 若无可用车位,系统告知用户无可用车位。
技术要求
车位查询服务的主要技术要求如下:端到端时延:≤ 500ms。
数据交互要求
| 车位查询请求消息(车端/APP发送给云平台) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | longitude | 必选 | Double | 用户位置经度 | —— |
| 5 | latitude | 必选 | Double | 用户位置纬度 | —— |
| 6 | length | 必选 | Double | 车辆长度 | 用于系统识别可用车位 |
| 7 | width | 必选 | Double | 车辆宽度 | |
| 8 | height | 必选 | Double | 车辆高度 | |
| 9 | avpID | 可选 | String | 请求查询的AVP停车场ID | 停车场名字或关键字 |
| 车位查询反馈消息(云平台发送给车端/APP) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | feedbackAck | 必选 | Integer | 查询结果确认 | 0 ~ 查询成功 1 ~查询失败 |
| 5 | avpName | 必选 | String | 停车场名称 | 例如:上海虹桥P9停车场 |
| 6 | avpID | 必选 | String | AVP停车场ID | —— |
| 7 | address | 必选 | String | 停车场地址 | 例如:上海闵行区华漕镇申红路 |
| 8 | entryNum | 必选 | Integer | 停车场入口数量 | —— |
| 9 | entranceName | 可选 | String | 停车场入口名称 | 例如:西北口+西北口的经纬度。如有多个入口,可结合位置信息发送多条。 |
| 10 | longitude | 可选 | Double | 停车场入口位置经度 | |
| 11 | latitude | 可选 | Double | 停车场入口位置纬度 | |
| 12 | exitNum | 必选 | Integer | 停车场出口数量 | —— |
| 13 | exitName | 可选 | String | 停车场出口名称 | 例如:西北口+西北口的经纬度;如有多个出口,可结合位置信息发送多条 |
| 14 | longitude | 可选 | Double | 停车场出口经度 | |
| 15 | latitude | 可选 | Double | 停车场出口纬度 | |
| 16 | distance | 必选 | Integer | 用户距离目的地的距离 | 单位为m |
| 17 | parkingSpace | 可选 | Integer | 停车位个数 | —— |
| 18 | availParkSpace | 必选 | Integer | 可用停车位个数 | —— |
| 19 | availChargParkSpace | 可选 | Integer | 可用带充电桩停车位的个数 | —— |
| 20 | parkingSpaceIDList | 可选 | Sequence | 可用停车位的ID | 若用户端加载了停车场地图,则该数据项可结合停车场地图显示,供用户指定选择的车位。 |
| 21 | parkingArea | 可选 | Double | 车场面积 | 单位为m2 |
| 22 | feeStandard | 必选 | Double | 收费标准 | 单位为RMB/h |
| 23 | openTime | 必选 | String | 营业时间 | —— |
| 24 | floorNum | 可选 | Integer | 可停车楼层数量 | —— |
| 25 | errorInfo | 可选 | String | 查询失败原因 | —— |
车位预约
工作流程
车位预约的基本工作流程如下:
1. 用户通过APP查询到可用停车场和停车位;
2. 在有可用停车位的情况下,进行车位预约,停车位会为用户预留;
3. 若预约失败,则告知用户。
技术要求
车位查询服务的主要技术要求如下:端到端时延:≤ 500ms。
数据交互要求
| 车位预约请求消息(车端/用户APP发送给云平台) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | avpID | 必选 | String | 预约的AVP停车场信息 | —— |
| 5 | parkingSpaceID | 可选 | String | 预约车位的信息 | 来源于上一章节中的parkingSpaceIDList |
| 6 | carNo | 必选 | String | 车牌号码 | 用于车辆进场身份识别 |
| 7 | orderTime | 必选 | Integer | 预约停车时间,UTC时间戳 | 单位为秒 |
| 8 | orderDuration | 可选 | Integer | 预约时长 单位为分钟 | 车位保留时长,系统可设置默认值。用户也可选,但是对应不同的权限可能涉及费用 |
| 9 | phoneNo | 必选 | String | 手机号码 | 用于接收预约信息 |
| 10 | autoLevel | 必选 | String | 车辆自动驾驶等级 | 用于平台判断该停车场是否可以支持当前车辆的自主代客泊车服务 |
| 11 | protocolVersion | 必选 | String | 车端柯支持的车场直连通信协议版本 | |
| 12 | vehicleBrand | 可选 | String | 车辆品牌 | |
| 13 | vehicleModel | 可选 | String | 车辆型号 | |
| 车位预约请求反馈(云平台发送给车端/用户APP) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | carNo | 必选 | String | 车牌号 | —— |
| 5 | avpID | 必选 | String | AVP停车场身份信息 | —— |
| 6 | feedbackACK | 必选 | Integer | 预约成功:0; 预约失败:1 | —— |
| 7 | reserveTime | 可选 | Integer | 成功预约后,确认本次保留时间 | 单位为分钟 |
| 8 | estimateFee | 可选 | Double | 确认车位保留所需要的费用 | 单位为元 |
| 9 | parkingSpaceID | 必选 | String | 预定的停车位信息 | 可由用户选择,平台确定或者平台分配 |
| 10 | errorInfo | 可选 | String | 预约失败状态下的对应信息 | —— |
取消预约
工作流程
取消预约的基本工作流程如下:
1. 用户通过车端或手机端APP预约后,取消预约;
2. 云平台确认取消请求,并返回取消预约服务处理结果。
技术要求
取消预约服务的主要技术要求端到端时延:≤ 500ms。
数据交互要求
| 取消预约请求消息(车端/用户APP发送给云平台) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | avpID | 必选 | String | 预约的AVP停车场编号 | —— |
| 5 | carNo | 必选 | String | 车牌号码 | —— |
| 6 | parkingSpaceID | 必选 | String | 预定的停车位信息 | —— |
| 取消预约请求反馈(云平台发送给车端/用户APP) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | carNo | 必选 | Sting | 车牌号码 | —— |
| 5 | feedbackAck | 必选 | Boolean | 取消成功:0 取消失败:1 | —— |
| 6 | errorInfo | 可选 | String | 取消失败状态下对应的信息 | —— |
| 7 | remainingTimes | 可选 | Integer | 剩余可预约次数 | —— |
| 8 | lockTime | 可选 | Integer | 下次可预约的时间间隔 | —— |
泊车请求
工作流程
泊车请求服务的基本工作流程如下:
1. 用户到达停车场下客区,发起泊车请求;
2. 平台收到车辆泊车请求,进行用户身份鉴权,并核对预约信息;
3. 平台给用户发送泊车请求确认;
4. 平台与场端子系统、车端子系统进行信息交互,将车辆驾驶权由用户交接给车辆;
5. 平台将驾驶权交接结果反馈到车辆。
技术要求
泊车请求服务的主要技术要求:端到端时延:≤ 500ms
数据交互要求
| 用户泊车请求(用户APP发送给云平台) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | longitude | 必选 | Double | 用户位置经度 | 用户位置信息 |
| 5 | latitude | 必选 | Double | 用户位置纬度 | |
| 6 | floorInfo | 必选 | Integer | 楼层信息 | |
| 7 | carNo | 必选 | String | 车牌号码 | —— |
| 8 | vehicleID | 必选 | String | 车辆ID | —— |
| 9 | avpID | 必选 | String | AVP停车场信息 | —— |
| 10 | vehicleFuelType | 必选 | Integer | 车辆动力类型: 0 ~ 燃油车 1 ~ 电动车 2 ~ 混合动力 | —— |
| 车辆驾驶权交接请求(云平台发送给车辆子系统) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | carNo | 必选 | String | 车牌号码 | —— |
| 5 | vehicleID | 必选 | String | 车辆ID | —— |
| 6 | parkingSpaceID | 必选 | String | 预约车位信息 | —— |
| 7 | coordinationSystem | 必选 | Integer | 坐标系类型: 0 ~ UTM 1 ~ WGS-84 2 ~ GCJ-02 3 ~ CGS-2000 | 进场之后,系统交互位置信息的坐标系 |
| 8 | UTM_origin | 条件性必选 | Sequence | 相对坐标系原点的经纬度坐标 | 当coordinationSystem为UTM时,此项必选 |
| 9 | UTM_XAxis_Offset_Angle | 条件性必选 | Double | UTM坐标系的X轴方向与正北方向的夹角 | 当coordinationSystem为UTM时,此项必选 |
| 车辆驾驶权交接反馈(车辆子系统发送给云平台) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | carNo | 必选 | String | 车牌号码 | —— |
| 5 | vehicleID | 必选 | String | 车辆ID | —— |
| 6 | feedbackAck | 必选 | Integer | 0 ~ 交接成功 1 ~ 交接失败 2 ~ 交接中 | —— |
| 7 | errorInfo | 可选 | String | 交接失败状态下对应的信息 | |
| 车辆入场确认请求(平台发送给场端子系统) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | carNo | 必选 | String | 车牌号码 | —— |
| 5 | avpID | 必选 | String | AVP停车场ID | —— |
| 6 | parkingSpaceID | 必选 | String | 预约车位的信息 | —— |
| 7 | vehicleFuelType | 必选 | Integer | 车辆动力类型: 0 ~ 燃油车 1 ~ 电动车 2 ~ 混合动力 | —— |
| 车辆入场确认反馈(场端子系统发送给平台) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | carNo | 必选 | String | 车牌号码 | —— |
| 5 | avpID | 必选 | String | AVP停车场ID | —— |
| 6 | feedbackAck | 必选 | Boolean | 0 ~交接成功 1 ~ 交接失败 | —— |
| 7 | errorInfo | 可选 | String | 交接失败状态下的对应信息 | —— |
| 车辆泊车请求反馈(平台发送给APP) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | carNo | 必选 | String | 车牌号码 | —— |
| 5 | avpID | 必选 | String | AVP停车场ID | —— |
| 6 | parkingSpaceID | 必选 | String | 预约车位的信息 | —— |
| 7 | feedbackAck | 必选 | Boolean | 0 ~交接成功 1 ~ 交接失败 | —— |
| 8 | errorInfo | 可选 | String | 交接失败状态下的对应信息 | —— |
取车请求
工作流程
取车请求的基本工作流程如下:
1. 用户通过手机端APP发出取车请求;
2. 云平台查找用户车辆的信息,并下发到APP;
3. 用户选择待取车辆,点击确认取车,并支付相关费用;
4. 云平台返回取车请求服务处理结果。
技术要求
取车请求服务的主要技术要求:端到端时延:≤ 500ms;
数据交互需求
| 取车请求消息(用户APP发送给云平台) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | avpID | 必选 | String | AVP停车场ID | —— |
| 5 | carNo | 必选 | String | 车牌号码 | —— |
| 6 | orderTime | 可选 | Integer | UTC时间戳(东八区),取车时间 | 单位为秒 |
| 7 | posPickUp | 必选 | Sequence | 取车位置信息 | 默认坐标系下的位置参考《车辆驾驶权交接请求(云平台发送给车辆子系统)》 |
| 取车请求反馈(云平台发送给用户APP) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | avpID | 必选 | String | AVP停车场ID | —— |
| 4 | carNo | 必选 | String | 车牌号码 | —— |
| 5 | feedbackAck | 必选 | Boolean | 0 ~ 取车请求通过 1 ~ 取车失败 | —— |
| 6 | errorInfo | 可选 | String | 取车失败状态下的对应信息 | —— |
| 7 | vehiclePos | 可选 | Sequence | 当前车辆位置 | 默认坐标系下的位置参考《车辆驾驶权交接请求(云平台发送给车辆子系统)》 |
车辆唤醒
工作流程
车辆唤醒服务的基本工作流程如下:
1. 云平台确认取车请求后,发送车辆唤醒任务消息至车辆子系统;
2. 车辆在泊位被唤醒后,发送状态消息至云平台;
3. 云平台将唤醒信息同步至用户APP。
技术要求
车辆唤醒服务的主要技术要求:端到端时延:≤ 500ms;
数据交互要求
| 车辆唤醒请求消息(云平台发送给车辆子系统) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | avpID | 必选 | String | AVP停车场ID | —— |
| 5 | carNo | 必选 | String | 车牌号码 | —— |
| 6 | vehicleID | 必选 | String | 车架号 | —— |
| 7 | posPickUp | 必选 | Sequence | 取车位置信息 | 默认坐标系下的位置参考《车辆驾驶权交接请求(云平台发送给车辆子系统)》 |
| 车辆唤醒反馈消息(车辆子系统发送给云平台) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | avpID | 必选 | String | AVP停车场ID | —— |
| 5 | carNo | 必选 | String | 车牌号码 | —— |
| 6 | vehicleID | 必选 | String | 车架号 | —— |
| 7 | feedbackAck | 必选 | Integer | 0 ~ 唤醒成功 1 ~ 唤醒失败 2 ~ 唤醒中 | —— |
| 8 | errorInfo | 可选 | String | 唤醒失败状态下的对应信息 | —— |
| 9 | vehiclePos | 可选 | Sequence | 当前车辆位置 | 默认坐标系下的位置参考《车辆驾驶权交接请求(云平台发送给车辆子系统)》 |
车-场基础数据交互内容
场内高精度定位
工作流程
场内定高精度定位的基本工作流程如下:
1. 用户发起场内定位请求;
2. 场端进行用户身份识别,并解算用户位置;
3. 场端按约定原则将位置信息发送给对应用户。
技术要求
场内高精度定位的主要技术要求如下:
1. 停车场环境应符合合T/CSAE 156—2020中7.2.1的相关规定;
2. 停车场场端定位指标应符合T/CSAE 261—2022中6.2.4的相关规定;
3. 停车场场端地图和坐标系需要与车端一致。
数据交互要求
| 场内高精度定位请求(车辆发给场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | tagID | 可选 | String | 无线定位用户标签 | —— |
| 5 | notificationInterval | 必选 | Double | 当需要场端周期性反馈位置信息时的反馈频率 | 单次:0 其他有效值:x Hz |
| 场内高精度定位信息反馈(场端发给车辆) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | feedbackAck | 必选 | Boolean | 0 ~ 确认 1 ~ 失败 | —— |
| 5 | vehiclePos | 必选 | Sequence | 当前车辆位置 | 默认坐标系下的位置参考《车辆驾驶权交接请求(云平台发送给车辆子系统)》 |
| 6 | errorInfo | 可选 | String | 失败对应信息 | —— |
场端全局路径规划
工作流程
场端路径规划基本工作流程:
1. 车端发送注册会话请求给场端,场端响应,完成注册,并完成车体约束检查;
2. 起止点位置信息获取;
3. 车端发送全局路径获取请求给场端,场端根据设备标识、起止点位置等信息计算全局路径;
4. 场端返回全局路径序列给车端;
5. 车端注销会话。
其中起止点位置可以由车端指定或者场端指定。
技术要求
场端全局路径规划的主要技术要求如下:
1. 全局路径更新频率:≤ 1Hz(按需,不一定周期性更新);
2. 地图数据精度:≤ 20cm;
3. 会话时长:场内;
4. 位置解析:起止点位置获取,或发生某事件的位置获取;
5. 路径要素:位置约束。
数据交互需求
| 全局路径规划获取请求(车端->场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | length | 必选 | Double | 车辆长度 | 车辆尺寸 |
| 5 | width | 必选 | Double | 车辆宽度 | |
| 6 | height | 必选 | Double | 车辆高度 | |
| 7 | weight | 必选 | Double | 车辆重量 | —— |
| 8 | startPos | 可选 | Sequence | 开始位置 | 路径的起止点可以由车端指定或者场端指定。 若车端可以获取自身位置,则需必选该字段 |
| 9 | endPos | 可选 | Sequence | 结束位置 | |
| 10 | heading | 必选 | Double | 车头方向 | 车辆发送请求时的车头方向会影响路径的选择 |
| 全局路径规划获取响应(场端->车端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | globalPathList{pos,heading,suggestedSpeed, estimatedTimeArrival} | 必选 | Sequence | 全局路径结果 | —— |
场端局部路径规划
工作流程
场端局部路径规划基本工作流程:
1. 车端发送注册会话请求给场端,场端响应,完成注册,并完成车体约束检查;
2. 车端发送局部路径获取请求给场端,场端根据设备标识、起止点位置等信息计算全局路径;
3. 场端返回局部路径序列给车端;
4. 车端注销会话。
技术要求
场端动态路径规划的主要技术要求如下:
1. 局部路径更新频率:≥ 10Hz;
2. 地图数据精度:≤ 20cm;
3. 会话时长:场内;
4. 路径要素:位置,方向,速度约束;
5. 路径要素密度: 0.1~0.5m间隔。
数据交互要求
| 局部路径规划获取请求(车端->场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | length | 必选 | Double | 车辆长度 | 车辆尺寸 |
| 5 | width | 必选 | Double | 车辆宽度 | |
| 6 | height | 必选 | Double | 车辆高度 | |
| 7 | weight | 必选 | Double | 车辆重量 | —— |
| 8 | startPos | 可选 | Sequence | 开始位置 | 路径的起止点可以由车端指定或者场端指定。 若车端可以获取自身位置,则需必选该字段 |
| 9 | endPos | 可选 | Sequence | 结束位置 | |
| 10 | heading | 必选 | Double | 车头方向 | 车辆发送请求时的车头方向会影响路径的选择 |
| 11 | priority | 可选 | Integer | 用户的优先级 | —— |
| 12 | subscriptionType | 条件性必选 | Boolean | 0 ~ 事件 1 ~ 周期 | 可以选择周期性订阅局部路径,或者按照场端推送逻辑,进行event形式的订阅 |
| 13 | notificationInterval | 可选 | Integer | 订阅周期 | SubscriptionType为Event时,不填此项 |
| 14 | wheelBase | 可选 | Double | 车辆轴距 | —— |
| 15 | maxTurningAngle | 可选 | Double | 最大转角 | —— |
| 16 | inertiaYaw | 可选 | Double | 转动惯量 | —— |
| 局部路径规划获取响应(场端->车端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | globalPathList{pos,heading,suggestedSpeed, estimatedTimeArrival} | 必选 | Sequence | 全局路径结果 | —— |
| 车辆动态数据上传(车端->场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | pitch | 必选 | Double | 俯仰 | BSM内为可选 |
| 2 | row | 必选 | Double | 横滚角 | BSM内为可选 |
| 3 | heading | 必选 | Double | 航向角 | Heading = Yaw |
| 4 | acceleration | 可选 | Double | 合成加速度 | 加速度可以根据速度计算出来,列为可选 |
| 5 | velocity | 必选 | Double | 速度 | —— |
| 6 | yawRate | 必选 | Double | 横摆角速度 | —— |
| 7 | frontWheelAngle | 必选 | Double | 前轮转角 | —— |
| 8 | rearWheelAngle | 可选 | Double | 后轮转角 | —— |
场端感知信息共享
工作流程
场端感知信息共享的基本工作模式有两种,分别如下:
1. 场端广播,车端接收模式
1.1 场端设施通过传感器获取停车场实时数据,将识别的障碍物和事件等感知信息进行融合之后,在场内进行广播;
1.2 车辆入场,接收场端感知信息;
1.3 车辆接收感知信息辅助自动驾驶,完成目标车位的泊车。
2. 车端请求,场端反馈
2.1 场端设施通过传感器获取停车场实时数据,将识别的障碍物和事件等感知信息进行融合处理;
2.2 车辆入场,向场端注册请求该服务;
2.3 车辆运行途中,场端根据车辆的请求(单次或订阅),向车辆发送或发布相应数据;
2.4 车辆离场时,向场端注销该服务。
技术要求
场端感知信息共享的主要技术要求如下:
1. 场端数据更新频率:≥ 10Hz;
2. 应用层端到端时延:≤ 100ms。
数据交互要求
| 场端感知信息数据下发(场端广播) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | availSensingArea | 可选 | Sequence | 场端感知覆盖范围 | —— |
| 3 | requestedDataList | 必选 | Sequence | 返回的目标数据 | —— |
| 场端感知信息共享服务注册(车端发送给场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | areaOfInterest | 可选 | Sequence | 感兴趣的区域 | —— |
| 场端感知信息共享服务注册反馈(场端发送给车端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | registerResult | 必选 | Integer | 0 ~ areaOfInterest包含在场端感知范围 1 ~ areaOfInterest超出场端感知范围 2 ~ 失败 | —— |
| 5 | availSensingArea | 可选 | Sequence | 场端感知覆盖范围 | —— |
| 6 | vehiclePos | 必选 | Sequence | 默认坐标系下的位置数据 | 默认坐标系下的位置参考《车辆驾驶权交接请求(云平台发送给车辆子系统)》 |
| 场端感知信息共享服务单次请求(车端发送给场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | dataObjectType | 必选 | Sequence | 0 ~ 障碍物 1 ~ 事件 2 ~ 障碍物和事件 | —— |
| 5 | priority | 可选 | Integer | 用户的优先级 | —— |
| 6 | order | 可选 | Integer | 返回的目标列表的顺序: 0 ~ 升序 1 ~ 降序 | —— |
| 7 | filter | 可选 | String | 过滤规则 | —— |
| 场端感知信息共享服务单次请求反馈(场端发送给车端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | requestAck | 必选 | Integer | 反馈状态: 0 ~ Successful 1 ~ invalidAID 2 ~ invalidDataObjectType 3 ~ invalidPriority 4 ~ invalidOrder 5 ~ invalidFilter | —— |
| 5 | dataObjectType | 必选 | Sequence | 0 ~ 障碍物 1 ~ 事件 2 ~ 障碍物和事件 | —— |
| 6 | requestedDataList | 条件性必选 | Sequence | registerDataConsumerResult | 若返回值”result”为“successful”,则此项必选 |
| 7 | errorInfo | 可选 | String | 反馈失败的原因 | |
| 车端感知信息共享服务订阅请求(车端发送给场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | dataObjectType | 必选 | Sequence | 0 ~ 障碍物 1 ~ 事件 2 ~ 障碍物和事件 | —— |
| 5 | priority | 可选 | Integer | 用户的优先级 | —— |
| 6 | order | 可选 | Integer | 返回的目标列表的顺序: 0 ~ 升序 1 ~ 降序 | —— |
| 7 | filter | 可选 | String | 过滤规则 | —— |
| 8 | notificationInterval | 必选 | Double | 订阅周期 | 如果车端没给订阅周期,则按场端默认周期值发送数据 |
| 9 | multiplicity | 可选 | Integer | 返回的requested data至少包含几个objects | 如果该值超过场端能给到的最大object数,则按场端可发送的最多object来发 |
| 场端感知信息共享服务订阅反馈(场端发送给车端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 必选 | String | 车辆ID | —— |
| 4 | subscriptionID | 条件性必选 | Integer | 订阅者ID | 若返回值”resultAck”为“successful”,则此项必选 |
| 5 | requestAck | 必选 | Integer | 反馈状态: 0 ~ Successful 1 ~ invalidAID 2 ~ invalidDataObjectType 3 ~ invalidPriority 4 ~ invalidOrder 5 ~ invalidFilter | —— |
| 6 | errorInfo | 可选 | String | 错误消息 | —— |
| 场端感知信息共享服务发布(场端发送给车端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | subscriptionID | 条件性必选 | Integer | 订阅者ID | 若返回值”resultAck”为“successful”,则此项必选 |
| 4 | vehicleID | 必选 | String | 车辆ID | —— |
| 5 | requestDataList | 必选 | Sequence | 返回的目标数据 | 当表《场端感知信息共享服务订阅反馈(场端发送给车端)》中resultAck为订阅成功时,按表《车端感知信息共享服务订阅请求(车端发送给场端)》中的订阅周期,周期性发布 |
| 场端感知信息共享服务取消订阅(车端发送给场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | subscriptionID | 条件性必选 | Integer | 订阅者ID | 若返回值”resultAck”为“successful”,则此项必选 |
| 4 | vehicleID | 必选 | String | 车辆ID | —— |
| 场端感知信息共享服务取消订阅(车端发送给场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | vehicleID | 可选 | String | 车辆ID | —— |
| 4 | resultAck | 必选 | Integer | 反馈结果: 0 ~ successful 1 ~ InvalidAID 2 ~ InvalidSubscriptionID | —— |
| 5 | errorInfo | 可选 | String | 错误信息 | —— |
取车控制权切换
工作流程
取车控制权切换的工作流程如下:
1. 车辆到达取车区,用户上车;
2. 用户确认上车,并发起接管请求;
3. 系统将车辆控制权交接给用户;
4. 车端告知场端和/或云端,AVP结束,已经人为接管;
5. 场端与云端进行接管状态同步。
技术要求
取车控制权切换服务的主要技术要求:端到端时延:≤500ms。
数据交互要求
| 控制权切换通知(车辆子系统发送给云端/场端) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | vehicleID | 必选 | String | 车辆ID | —— |
| 5 | carNo | 必选 | String | 车牌号码 | —— |
| 控制权切换确认(云端/场端发送给车辆子系统) | |||||
|---|---|---|---|---|---|
| 序号 | 名称 | 必选/可选 | 数据类型 | 描述 | 备注 |
| 1 | timeStamp | 必选 | Long | UTC时间戳(东八区),单位:毫秒 | 不可缺省,0xFFFFFFFFFFFFFFFF表示异常 |
| 2 | sessionID | 必选 | Integer | 会话唯一标识 | —— |
| 3 | userID | 必选 | String | 用户身份信息 | —— |
| 4 | requestAck | 必选 | Boolean | 0 ~ 切换确认 1 ~ 切换拒绝 | —— |
| 5 | errorInfo | 可选 | String | 错误原因 | —— |
场云基础数据交互内容
工作流程
场端设施云平台数据交换基本工作流程:
1. 场端设备注册获取数字证书,与云平台建立安全连接;
2. 云平台发起数据查询请求,或场端主动按周期或者事件向云平台上报信息;
3. 发送数据包至云平台端并获取云端数据包;
4. 云平台接收和下发数据包;
5. 完成数据同步。
技术要求
场端设施与云平台服务数据同步的主要技术要求如下:
1. 周期上报数据更新频率:默认60s,也可以通过管理信息配置上报频率;
2. 非周期数据更新频率:查询响应、事件触发。
数据交互要求
| 场端和云平台信息交互类型与交互内容 | ||||
|---|---|---|---|---|
| 序号 | 消息类型 | 消息子类型 | 操作类型 | 说明 |
| 1 | 场端AVP业务数据 | 场端设备基础信息 | 查询请求 | 云端向场端发出查询请求,查询场端基础信息 |
| 2 | 查询应答 | 场端收到查询请求后立即应答 | ||
| 3 | 主动上报 | 场端信息发生变化时,主动向云端发送 | ||
| 4 | 场端车位分配 | 主动上报 | 场端将给用户分配的车位信息,向云端上报 | |
| 5 | 场端感知信息 | 主动上报 | 场端通过感知融合得到停车场区域内的动态数据, 包括障碍物信息和事件信息等,向云端上报 | |
| 6 | 场端路径规划 | 主动上报 | 场端将给用户规划的路径信息,同步向云端上报 | |
| 7 | 场端同步定位坐标系信息 | 主动上报 | 场端将车场通信时关于位置的坐标系信息同步给云端 | |
| 8 | 场端定位信息 | 主动上报 | 场端向云端上报用户的位置信息 | |
| 9 | 场端运维管理信息 | 场端接入设备运行状态信息 | 查询请求 | 云端向场端发出查询请求,查询场端设备的运行状态信息 |
| 10 | 查询应答 | 场端收到查询后立即应答,发送相关信息 | ||
| 11 | 主动上报 | 场端按照固定频率或场端设备运行状态发生变化时,主动向云端上报设备与运行状态信息 | ||
| 12 | 场端设备运维管理信息 | 关机/重启请求 | 云端根据需要向场端发起远程关机或重启命令 | |
| 13 | 关机/重启应答 | 场端收到远程关机或重启命 令,立即应答,并执行关机/重启操作 | ||
| 14 | OTA升级 | 云端根据需要向场端发起远程OTA升级命令 | ||
| 15 | OTA升级应答 | 场端收到远程OTA升级命令后,立即应答,并执行升级操作 | ||
附录
障碍物分类
| 障碍物分类 | |
|---|---|
| 0 | 人 |
| 1 | 乘用车 |
| 2 | 卡车 |
| 3 | 公交 |
| 4 | 两轮车 |
| 5 | 三轮车 |
| 6 | 交通锥 |
| 7 | 雪糕筒 |
| 8 | 禁停牌 |
| 9 | 购物推车 |
| 10 | 梯子 |
| 11 | 婴儿车 |
| 12 | 婴儿座椅 |
| 13 | 箱子 |
| 14 | 不规则障碍物 |
| 15 | 地锁 |
| 16 | 限位杆 |
| 17 | 轮档 |
| 18 | 马路牙子 |
| 19 | 柱子(圆柱/方柱) |
| 20 | 石墩 |
| 21 | 隔离带 |
| 22 | 隔离桩 |
| 23 | 消防箱 |
| 24 | 水马 |
| 25 | 防撞桶 |
| 26 | 防火卷帘门 |
| 27 | 垃圾桶 |
| 28 | 树/灌木 |
| 29 | 镜子 |
| 30 | 减速带 |
| 31 | 小动物 |
| 32 | 其他 |
DF_ReferenceArea
| DF_ReferenceArea | ||||||
|---|---|---|---|---|---|---|
| 序号 | 字段 | 子项 | 次子项 | 数据类型 | 描述 | 备注 |
| 1 | geometricCenterPoint | pointPos | —— | Sequence | 兴趣区域的几何中心位置 | —— |
| 2 | geometricArea | Circle:0 | radius | Integer | 圆半径 | 几何区域 |
| Rectangle:1 | aSemiAxis | Integer | 长半轴 | |||
| bSemiAxis | Integer | 短半轴 | ||||
| azimuthAngle | Integer | 长半轴方位角 | ||||
| Ellipse:2 | aSemiAxis | Integer | 长半轴 | |||
| bSemiAxis | Integer | 短半轴 | ||||
| azimuthAngle | Integer | 长半轴方位角 | ||||
DF_requestedDataList
| DF_requestedDataList | ||||||
|---|---|---|---|---|---|---|
| 序号 | 字段 | 子项 | 次子项 | 数据类型 | 描述 | 备注 |
| 1 | ObjectID | —— | 必选 | String | —— | —— |
| 2 | dataObjectType | —— | 必选 | Integer | 0 ~ 障碍物 1 ~ 事件 | 障碍物必填项的序号是4-20 事件必填的序号是21-27 每一个requestedDataList只能填一种dataObjectType |
| 3 | detectionSource | RSUID | 必选 | String | RSU的ID信息 | —— |
| RSUPos | 必选 | Sequence | 路侧单元参考位置坐标 | 默认坐标系下的位置,参考表《车辆驾驶权交接请求(云平台发送给车辆子系统)》 | ||
| DataSource | 必选 | Integer | 经由RSU发送的障碍物或事件信息源: 0 ~ 未知 1 ~ 交警 2 ~ 政府平台 3 ~ 气象部门 4 ~ 互联网服务 5 ~ 本地检测 | —— | ||
| 4 | objectSize | length | 可选 | Double | —— | 当dataObjectType为障碍物时,此选项为必填项。 其中若场端无法输出某项参数时,可发送全1字段表示无效值。如integer型数据发送OxFFFFFFFF |
| 5 | width | 可选 | Double | —— | ||
| 6 | height | 可选 | Double | —— | ||
| 7 | objectPos | —— | 可选 | Sequence | 默认坐标系下的位置,参考表《车辆驾驶权交接请求(云平台发送给车辆子系统)》 | |
| 8 | objectSpeed | —— | 可选 | Sequence | 参考附录DF_speed | |
| 9 | fOrientation | —— | 可选 | Double | 航向角 | |
| 10 | fOrientationStd | —— | 可选 | Double | 航向角标准差 | |
| 11 | fYawRate | —— | 可选 | Double | 横摆角速度 | |
| 12 | fYawRateStd | —— | 可选 | Double | 横摆角速度的标准差 | |
| 13 | uMotionState | —— | 可选 | Integer | 0 ~ Moving 1 ~ Stationary 2 ~ Movable | |
| 14 | uMaintanceState | —— | 可选 | Integer | 数据有效性: 0 ~ Measured 1 ~ Predicted 2 ~ New 3 ~ Deleted | |
| 15 | uClassfication | —— | 可选 | Integer | 目标物分类,参考附录障碍物分类 | |
| 16 | uClassficationConfidence | —— | 可选 | Double | 障碍物分类的置信度 | |
| 17 | uQualityFlag | —— | 可选 | Integer | 稳定性 | |
| 18 | uLifeCycle | —— | 可选 | Integer | Tracking时间 | |
| 19 | SignalStatus | —— | 可选 | Integer | 目标列表校验 | |
| 20 | ObjStationaryAge | —— | 可选 | Integer | 某一可移动障碍物从最近一次移动停止到当前时间为止的静止时间 | |
| 21 | eventPriority | —— | 可选 | Integer | 事件的紧急程度,优先级 | 当dataObjectType为事件时,此选项为必选项 |
| 22 | eventConfidence | —— | 可选 | Double | -表示事件信息源的置信度; -检测到事件的概率/置信度; -帮助车辆判断是否信任接收到的信息 | |
| 23 | eventDescription | —— | 可选 | String | 用文本的形式,对事件信息进行补充描述或说明 | |
| 24 | eventCenterPt | —— | 可选 | Sequence | 事件影响范围的中心点 | |
| 25 | eventRadius | —— | 可选 | Double | 影响半径 | |
| 26 | eventPolygon | —— | 可选 | Sequence | 使用多边形描述事件的影响范围 | |
| 27 | eventDurantion | —— | 可选 | Integer | 事件影响时间 | |
DF_pos
| DF_pos | ||||||
|---|---|---|---|---|---|---|
| ChoicePos | GNSS | posGNSS | longitude | 必选 | Double | —— |
| latitude | 必选 | Double | —— | |||
| altitude | 可选 | Double | —— | |||
| posGNSS_std | longitude_std | 必选 | Double | —— | ||
| latitude_std | 必选 | Double | —— | |||
| altitude_std | 可选 | Double | —— | |||
| floorInfo | —— | 必选 | String | 用户所在楼层信息 | ||
| floorInfo_std | —— | 可选 | Double | —— | ||
| UTM | posUTM | fDistX | 必选 | Double | X轴距离 (停车场地图坐标系下) | |
| fDistY | 必选 | Double | Y轴距离 (停车场地图坐标系下) | |||
| fDistZ | 可选 | Double | Z轴距离 (停车场地图坐标系下) | |||
| posUTM_std | fDistXstd | 可选 | Double | X轴距离的标准差 (停车场地图坐标系下) | ||
| fDistYstd | 可选 | Double | Y轴距离的标准差 (停车场地图坐标系下) | |||
| fDistZstd | 可选 | Double | Z轴距离的标准差 (停车场地图坐标系下) | |||
| floorInfo | —— | 必选 | String | 用户所在楼层 | ||
| floorInfo_Std | —— | 可选 | Double | —— | ||
DF_speed
| DF_speed | ||||||
|---|---|---|---|---|---|---|
| Speed | UTM | speedUTM | fVabsX | 必选 | Double | X轴速度的绝对值 |
| fVabsY | 必选 | Double | Y轴速度的绝对值 | |||
| fVabsZ | 必选 | Double | Z轴速度的绝对值 | |||
| speedUTM_Std | fVabsXstd | 可选 | Double | X轴速度的绝对值的标准差 | ||
| fVabsYstd | 可选 | Double | Y轴速度的绝对值的标准差 | |||
| fVabsZstd | 可选 | Double | Z轴速度的绝对值的标准差 | |||


















 1843
1843

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











