





 本文介绍了如何使用evo工具对ORB_SLAM2在TUM数据集上的运行结果进行评估。通过evo traj展示轨迹,evo ape和evo rpe计算绝对和相对姿态误差,分析SLAM系统的精度。同时,还探讨了配准、参数选项和误差指标的含义。
本文介绍了如何使用evo工具对ORB_SLAM2在TUM数据集上的运行结果进行评估。通过evo traj展示轨迹,evo ape和evo rpe计算绝对和相对姿态误差,分析SLAM系统的精度。同时,还探讨了配准、参数选项和误差指标的含义。
1.Github地址
2.安装安装evo
3.evo命令行交互
Metrics:
evo_ape - 绝对姿态误差
evo_rpe - 相对姿态误差
Tools:
evo_traj - 分析、绘制、输出一个或多个轨迹
evo_res - 比较一个或多个evo_ape/eco_rpe的结果文件
evo_fig - 重新打开序列化图像(存储为serialize_plot)
evo_config - 全局设置和配置文件操作
1)绘制多个轨迹 evo_traj
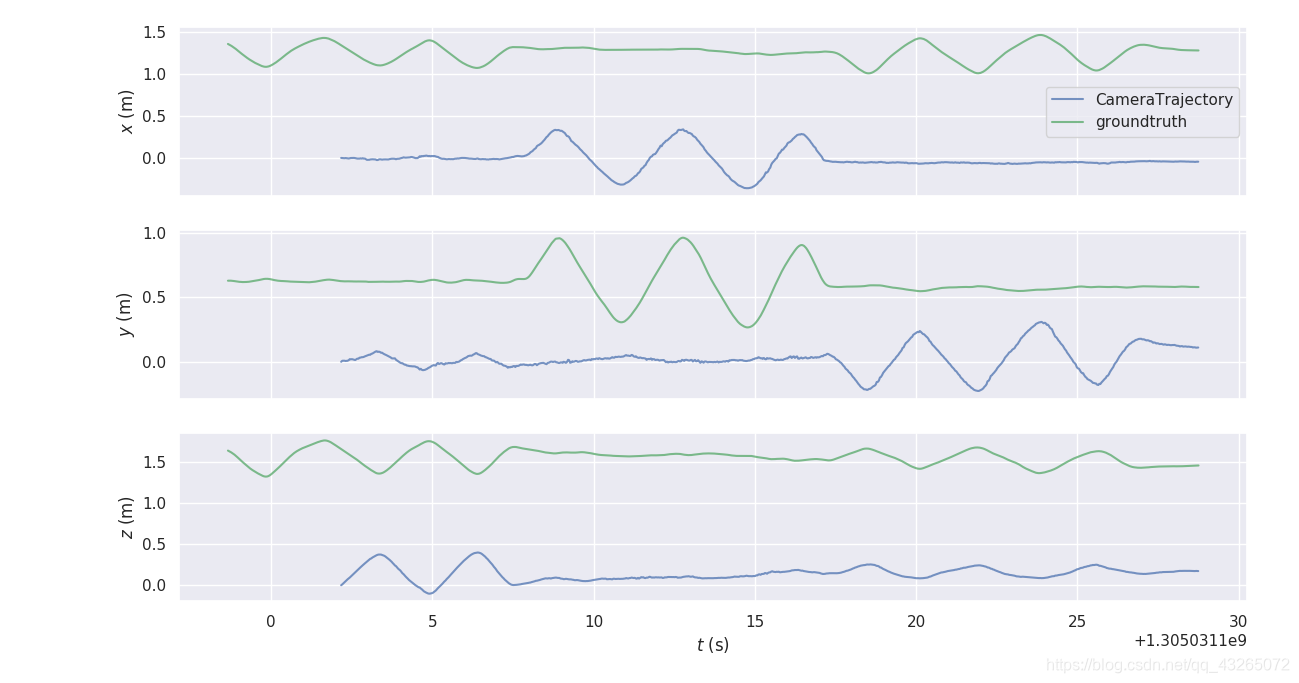
支持格式有tum,kitti,eurco。用ORB_SLAM2跑TUM数据集后得到两个txt文件,用evo将其与groundtruth一起显示出来
evo_traj tum CameraTrajectory.txt KeyFrameTrajectory.txt groundtruth.txt -p --plot_mode=xyz
结果:
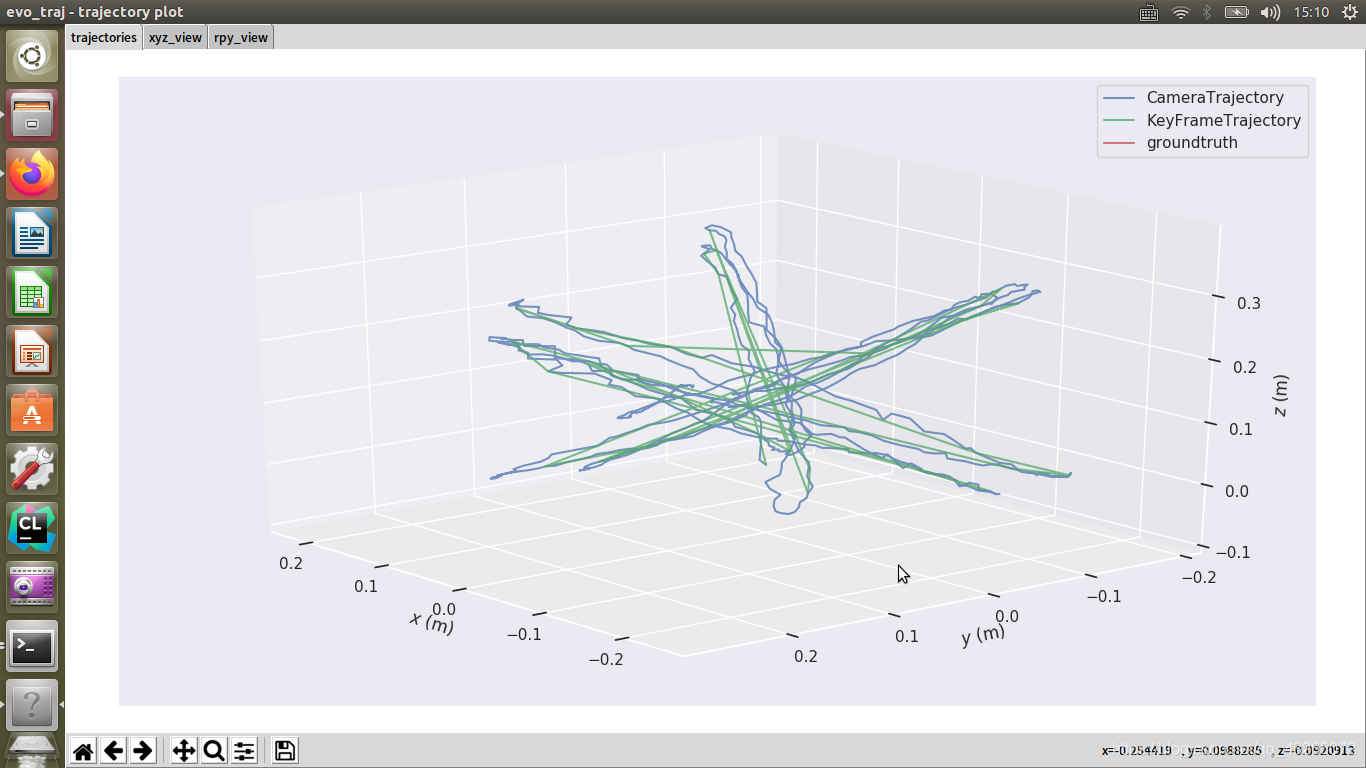 但是groundtruth在这两个轨迹很远的地方?
但是groundtruth在这两个轨迹很远的地方?
有以下参数
-p或–plot 绘图
-v或–verbose 输出相关信息(均值,方差等)
-f或–full_check检查相关信息(时间戳是否对应,四元数是不是单位四元数)
-a或–align对轨迹进行配准,用ICP的方法,并不是仅仅将起点对齐
运用陪准需要给定–ref
--align or -a = SE(3) Umeyama alignment (rotation, translation)
--align --correct_scale or -as = Sim(3) Umeyama alignment (rotation, translation, scale)
--correct_scale or -s = scale correction only
例如:
相机轨迹与groundtruth配准之前
evo_traj tum CameraTrajectory.txt groundtruth.txt -p
 配准之后
配准之后
evo_traj tum CameraTrajectory.txt --ref=groundtruth.txt -p -a
 2)在轨迹上进行测量
2)在轨迹上进行测量
evo_ape:绝对位姿误差,常被用作绝对轨迹误差,比较估计轨迹和参考轨迹并计算整个轨迹的统计数据,适用于测试轨迹的全局一致性。
命令语法:命令 格式 参考轨迹 估计轨迹 [可选项]
可选项有对齐命令、画图、保存结果等。
evo_ape tum groundtruth.txt CameraTrajectory.txt -r full -va -p --save_results results/ORB.zip
其中-r表示ape所基于的姿态关系
 -v表示verbose mode,详细模式
-v表示verbose mode,详细模式
 可通过evo_ape tum --help查看参数
可通过evo_ape tum --help查看参数
evo_rpe:相对位姿误差比较运动(姿态增量),相对位姿误差可以给出局部精度,例如slam系统每米的平移或者旋转漂移量。
命令语法:命令 格式 参考轨迹 估计轨迹 [可选项]
可选项有对齐命令、画图、保存结果等。
参考链接:SLAM精度测评——EVO
evo官方链接wiki

















 4230
4230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









