







 本文指导如何在国家知识产权局进行实名注册并介绍专利检索过程,以《一种冲浪机底板装置》为例,展示了专利申请、公开和授权的不同阶段。
本文指导如何在国家知识产权局进行实名注册并介绍专利检索过程,以《一种冲浪机底板装置》为例,展示了专利申请、公开和授权的不同阶段。
注册账号
进入国家知识产权局,然后点击查询服务中的第一项

这里需要进行实名注册,然后登陆账号。过程很简单,这里不多赘述
专利检索
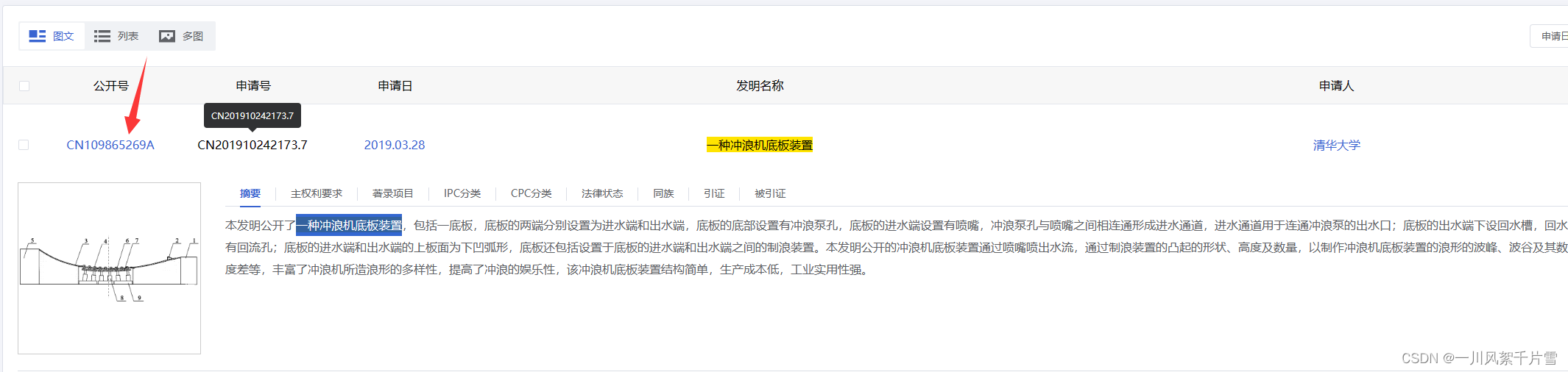
这里以《一种冲浪机底板装置》为例,检索结果如下

点击公开号
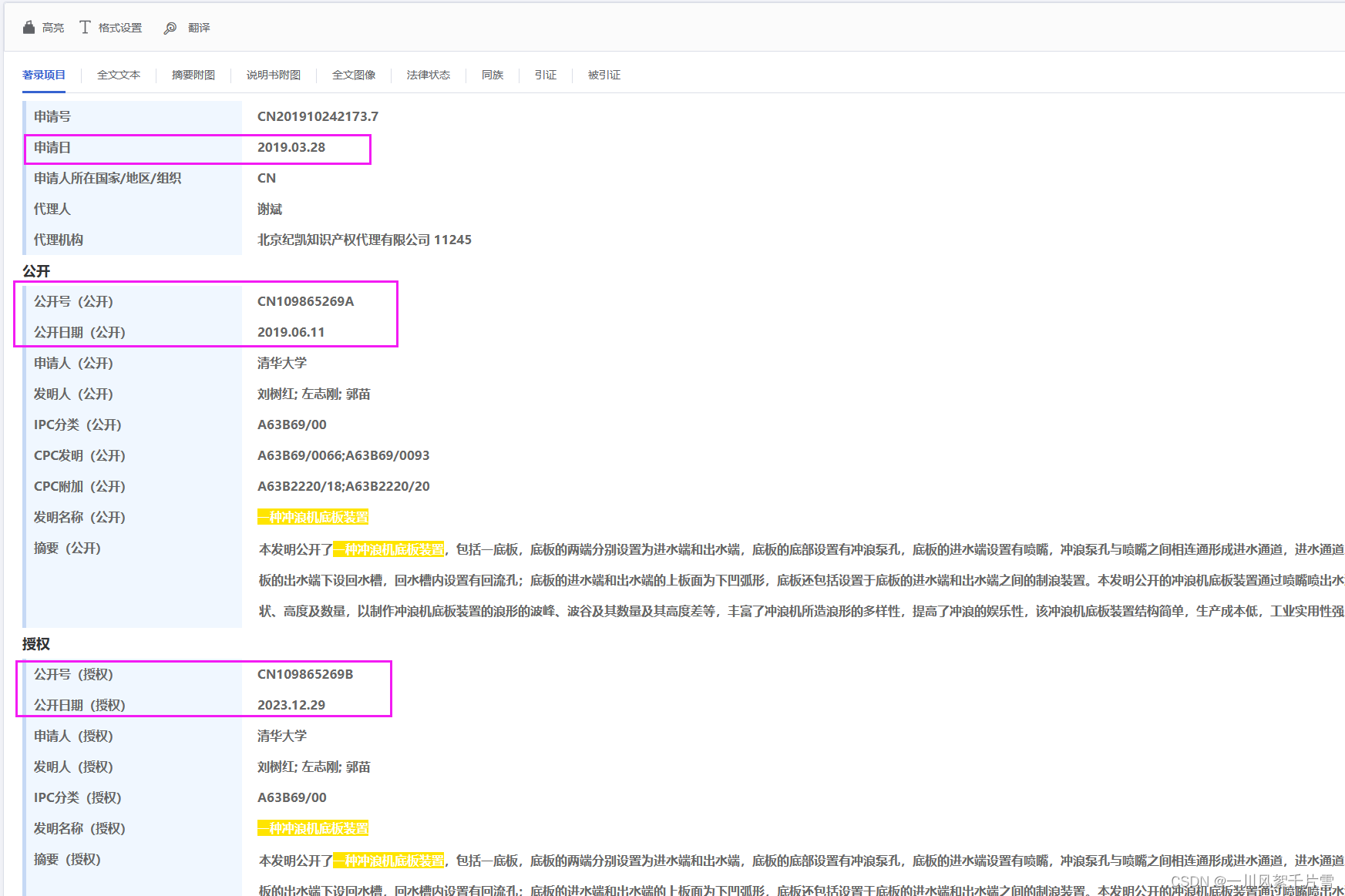
可以看到这里分为3个阶段申请、公开、授权。并不是每个专利都有3个选项的,可以看这里查看当前的状态。
进入国家知识产权局,然后点击查询服务中的第一项
这里需要进行实名注册,然后登陆账号。过程很简单,这里不多赘述
这里以《一种冲浪机底板装置》为例,检索结果如下
点击公开号
可以看到这里分为3个阶段申请、公开、授权。并不是每个专利都有3个选项的,可以看这里查看当前的状态。
 1676
3627
2496
1676
3627
2496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























