










 文章介绍了两个功能模块:PublishAckermannSportInformationC用于发布小车的运动控制信息,包括速度和舵机角度;PublishTargetPointInformationC则发布小车的目标位置坐标。这两个模块通过ROS工具箱创建消息,转换输入参数,赋值并发布到特定话题,实现与ROS系统的通信。
文章介绍了两个功能模块:PublishAckermannSportInformationC用于发布小车的运动控制信息,包括速度和舵机角度;PublishTargetPointInformationC则发布小车的目标位置坐标。这两个模块通过ROS工具箱创建消息,转换输入参数,赋值并发布到特定话题,实现与ROS系统的通信。
1、Publish Ackermann Sport Information C
(1)输入参数:Speed为小车的运动速度(大于0前行,小于0后退),Angle为小车的舵机打角(弧度制,正数为左转,负数为右转)
(2)输出参数:无
(3)主要作用:作为ROS与MATLAB的通讯接口,将控制小车运动的电机速度Speed和舵机打角Angle发布至ROS,ROS中的小车通过订阅该信息就可以控制小车运动了
(4)内部结构:
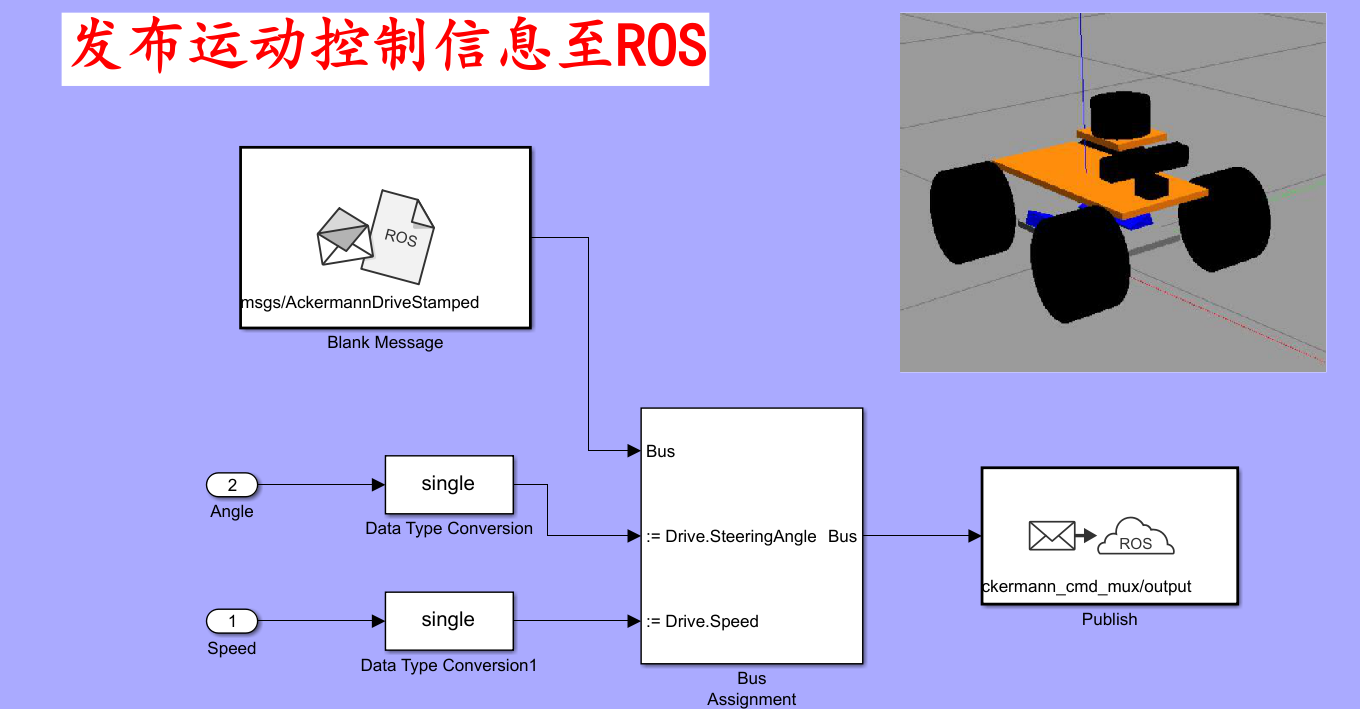
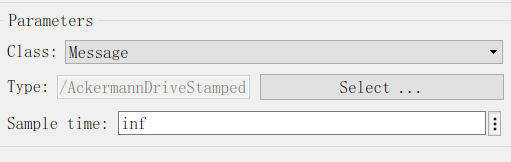
(5)具体实现过程:通过ROS工具箱中的Blank Message模块创建空白的消息,并选择消息类型为ackermann_msgs/AckermannDriveStamped
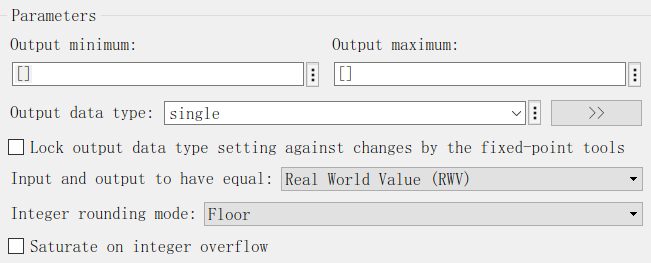
将输入的参数使用Data Type Conversion模块将其转换为single类型
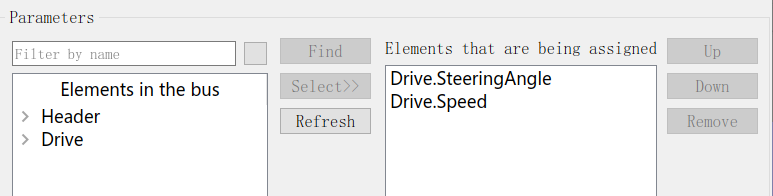
使用Bus Assignment模块将创建的消息类型中的SteeringAngle和Speed重新赋值为我们要输出的值,即对应的Angle和Speed
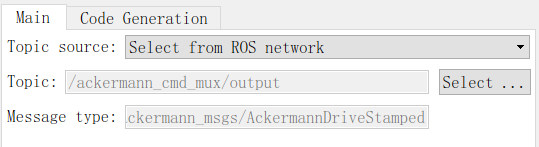
使用ROS工具箱中的Publish模块,将我们创建好的消息(已完成赋值),以话题/lackermann_cmd_mux/output的形式发布
(6)其他说明:无
2、Publish Target Point Information C

(1)输入参数:X和Y,是小车目标点的位置坐标
(2)输出参数:无
(3)主要作用:作为ROS与MATLAB的通讯接口,将期望的目标点的位置信息发布出去
(4)内部结构:
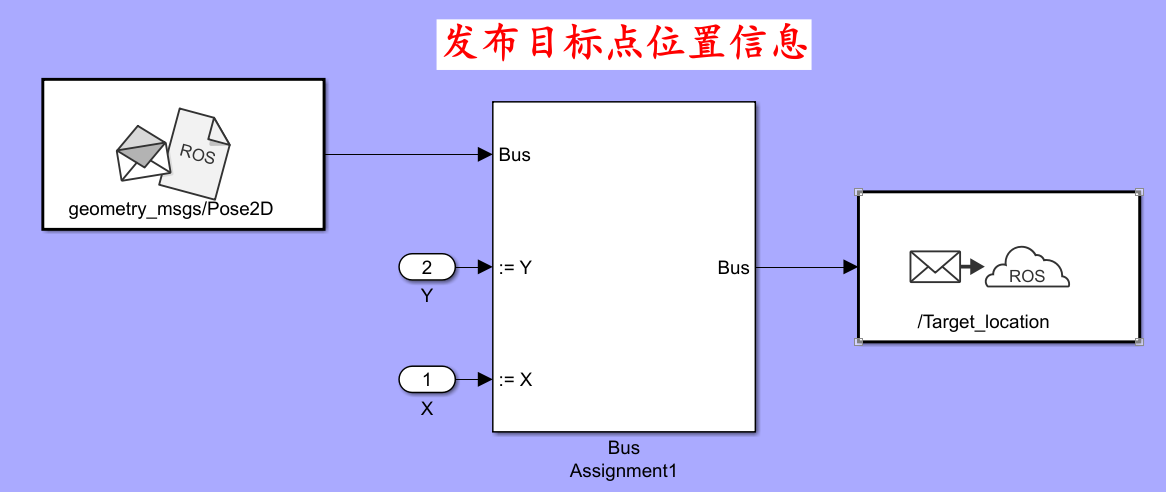
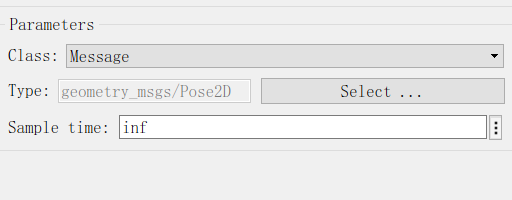
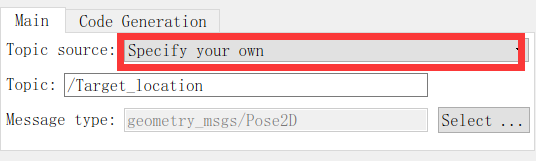
(5)具体实现过程:通过ROS工具箱中的Blank Message模块创建空白的消息,并选择消息类型为geometry_msgs/Pose2D
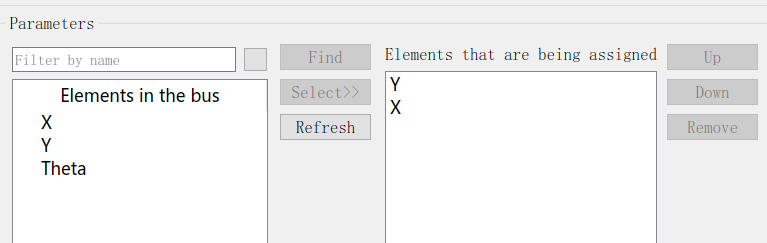
使用Bus Assignment模块将创建的消息类型中的X和Y重新赋值为我们要输出的值。
使用ROS工具箱中的Publish模块,将我们创建好的消息(已完成赋值),以自定义话题/Target_location的形式发布出去,这里的话题名是可以自己任意取的,但是为了与实验中其他模块对应起来,就不要用其他名字了



















 852
852

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











