






 本文详述了如何在Carla中正确导入3D车辆模型,包括解决车轮碰撞体与车轮不重合的问题,调整单位比例以适应不同尺寸的车辆,以及在UE4中确保车辆质量和碰撞体正确设置的方法。
本文详述了如何在Carla中正确导入3D车辆模型,包括解决车轮碰撞体与车轮不重合的问题,调整单位比例以适应不同尺寸的车辆,以及在UE4中确保车辆质量和碰撞体正确设置的方法。
- 车轮不是等尺寸,导致生成的车轮碰撞体图元无法正常工作。
- 3D建模软件(这里以3Dmax为例),默认情况下没有单位。但是如果车辆模型导出FBX设置了单位或者车辆模型建好,自己给车辆模型设置了单位。这样车辆模型再次导入建模软件,为了保证尺寸不变,进行单位转换,从而出现各种奇怪问题。
- FBX格式没有质量属性,但是导入Carla,模型的栅格数决定了碰撞体图元的默认质量,同尺寸下。质量太轻,即使黑色车轮碰撞体和车轮重合,车辆运行,也会出现奇怪现象。
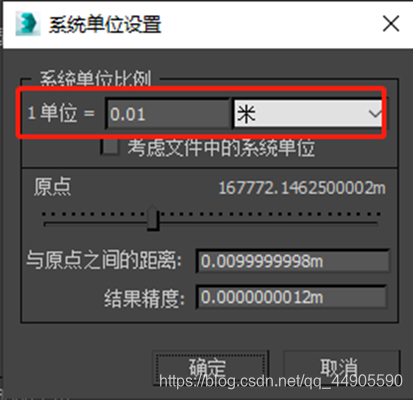
- UE4的单位是厘米,所以建模软建中系统的单位比例应该设置为1单位=0.01米。
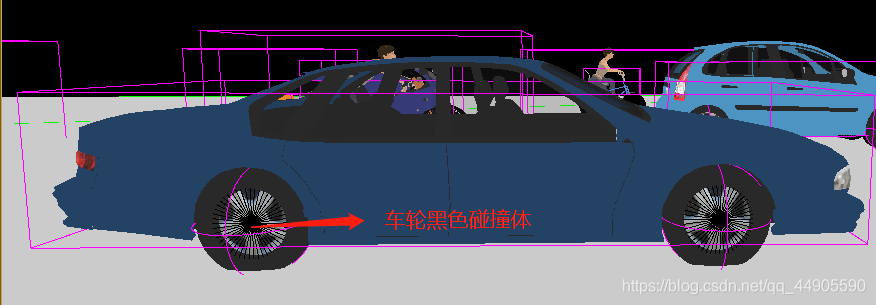
这样保证了车轮黑色碰撞体和车轮重合。大部分车辆无法工作的原因是车轮黑色碰撞体和车轮不重合。
但是小尺寸车辆车身图元质量太轻,无法将车轮黑色碰撞体和车轮压重合
5.可以正常使用的车辆必须满足两个条件:
车身图元的默认质量必须足够大,可以将黑色碰撞体和车轮压重合
黑色车轮碰撞体,必须和车轮静态网格重合。
6.UE4中车辆建好后使用pxvis collision 观察车辆。车轮的黑色碰撞体是否与车轮静态网格重合。
正常尺寸的车辆模型导入
正常尺寸的车只要在建模软件中单位比例设置1单位=0.01米,不会出现质量太轻,车轮黑色碰撞体不和车轮重合的问题。
并且创建父子类,车身(父类)、车轮(子类),如图

- 设置车身、车轮的X轴指向车头方向
- 将车轮的坐标轴原点设置到几何中心,车身的坐标轴原点设置在几何中心的正下方,与车轮边缘在同一平行线。
- 将整车的参考坐标:世界,坐标设置为:0 0 0
在3Dmax中的具体操作参考如下网址:
https://blog.csdn.net/qq_44905590/article/details/103033719
导入Carla。
https://blog.csdn.net/qq_44905590/article/details/103034017
小尺寸车辆模型导入
文章开头在解释问题出现的原因时说到,单位比例设置为1单位=0.01米,黑色车轮碰撞体和车轮静态网格重合。小尺寸的车在单位比例为1单位=0.01米下,车辆尺寸小它的栅格数就会很少,导致FBX导入UE4自动生成的图元质量太轻。车辆会出现车尾后翘,车辆运行会出现奇怪现象。
所以为了增加小车质量,减小单位比例,将单位比例设置为1单位=0.002米,同尺寸下增加栅格数。导入UE4后在车辆蓝图中给车轮黑色碰撞体设置偏移量。
车辆模型要求
(在建模软件中设置):
- 将建模软建中系统的单位比例应该设置为1单位=0.002米。
并记录1单位=0.01米时,各个车轮的xyz坐标。
- 缩放车辆尺寸必须等比例缩放,且缩放后只对车身重置,车轮不要重置,这样才能保证车轮碰撞体起作用。
- 车辆分为5个部分:车身(Vehicle_Base)、前轮左(Wheel_F_L)、前轮右(Wheel_F_R)、后轮左(Wheel_R_L)、后轮右(Wheel_R_R)
并且创建父子类,车身(父类)、车轮(子类)
- 设置车身、车轮的X轴指向车头方向
- 将车轮的坐标轴原点设置到几何中心,车身的坐标轴原点设置在几何中心的正下方,与车轮边缘在同一平行线。
- 将整车的参考坐标:世界,坐标设置为:0 0 0
在3Dmax中的具体操作可参考如下网址:
https://blog.csdn.net/qq_44905590/article/details/103033719
导入Carla
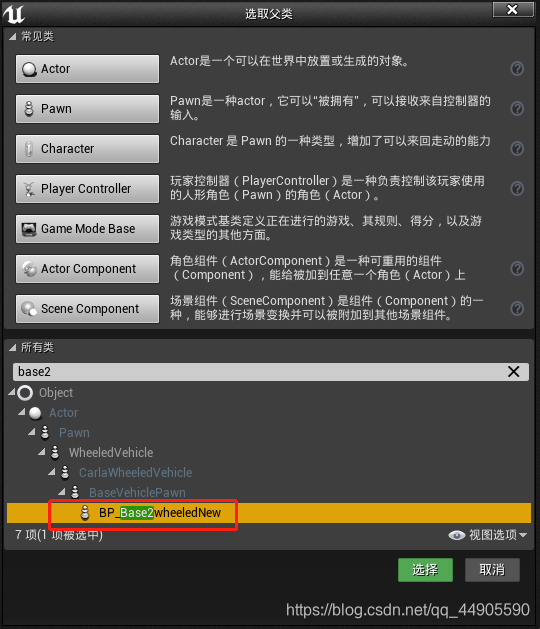
创建车辆蓝图之前的操作和正常尺寸的车辆一致。只是使用的车轮蓝图不同,小尺寸车的蓝图(BP_Base2wheeledNew)
具体操作参考如下网址
https://blog.csdn.net/qq_44905590/article/details/103034017
小尺寸车辆创建蓝图
Blueprint类
静态网格添加,动画添加,和正常车辆蓝图操作相同。
重点
根据下面公式,在车辆蓝图,设置车轮黑色碰撞体的偏移量。
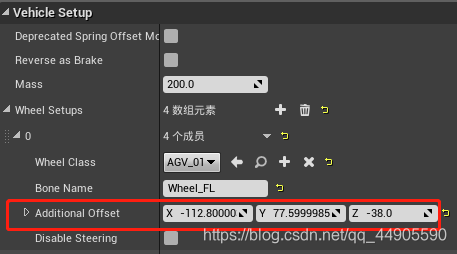
公式如下
Additional Offset :
X: -x 乘 倍数 + x
Y: y 乘 倍数 – y
Z:-z 乘 倍数 +z
式中X、Y、Z 是车辆蓝图中Additional Offset
x y z是3Dmax中1单位=0.01米时,车轮的坐标
倍数是 3Dmax中设置的1单位长度,与1单位=0.01米时比值
例如3Dmax中设置1单位=0.002米,则倍数=0.01除以0.002=5
结果如图。
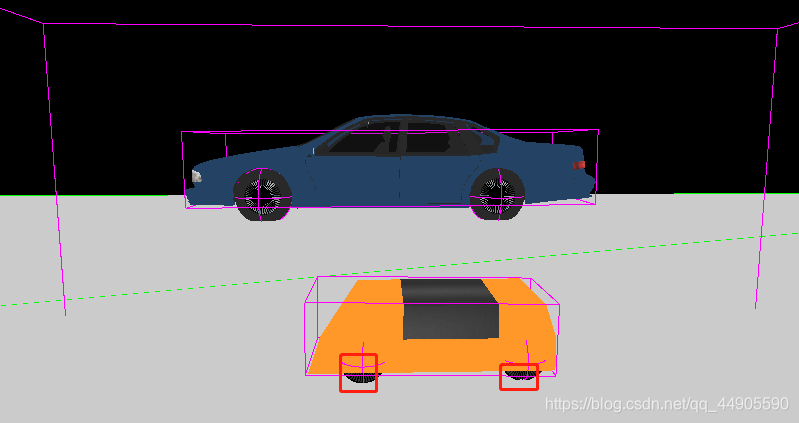
这样既保证了小车有足够的重量,黑色车轮碰撞体也与车轮静态网格重合。车辆运行完全正常,无奇怪现象。
使用上述方法,导入任意尺寸的车辆都可以正常工作,

















 1173
1173

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









