







此部分是自建仿真环境然后运行小车
1、启动gazebo
安装运行有问题的先参照资料解决一下
ROS基础(12)——机器人建模之gazebo
gazebo
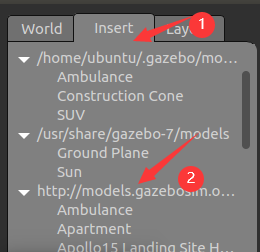
2、新建文件
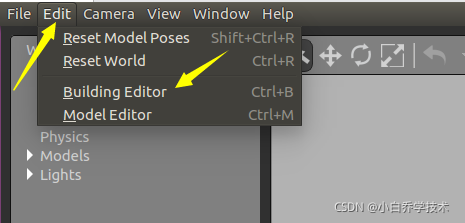
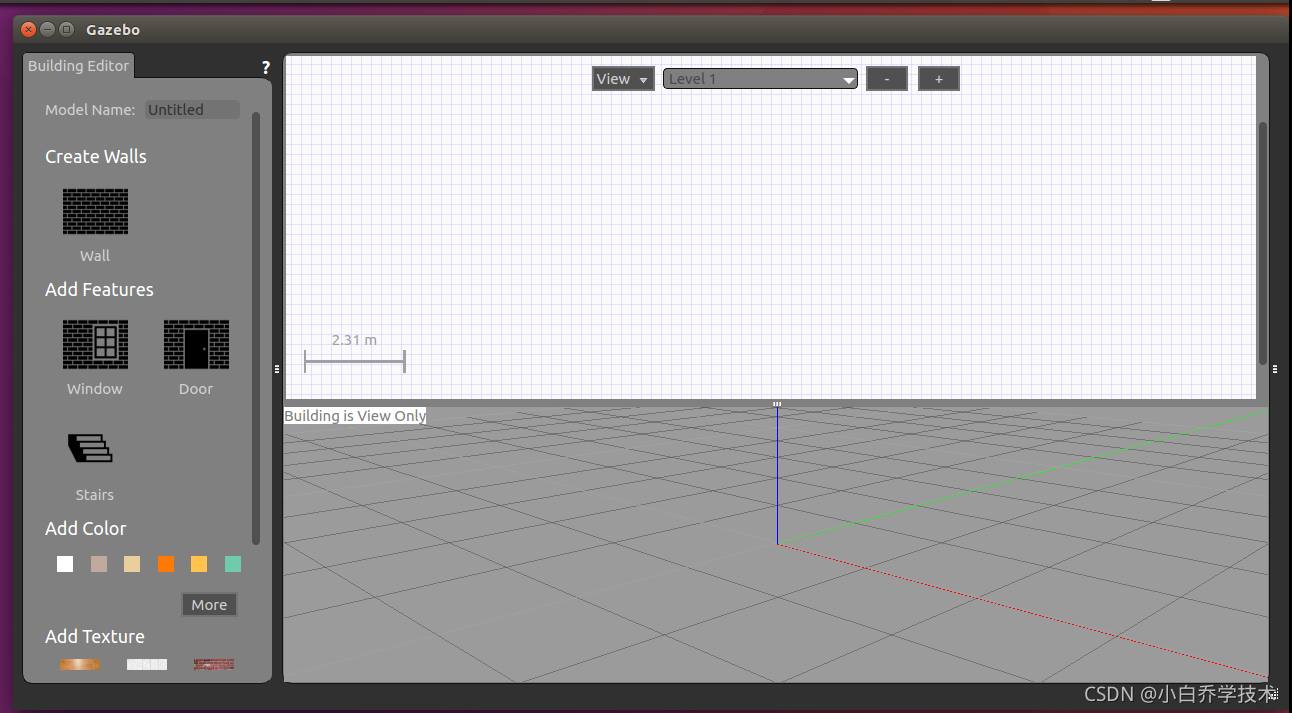
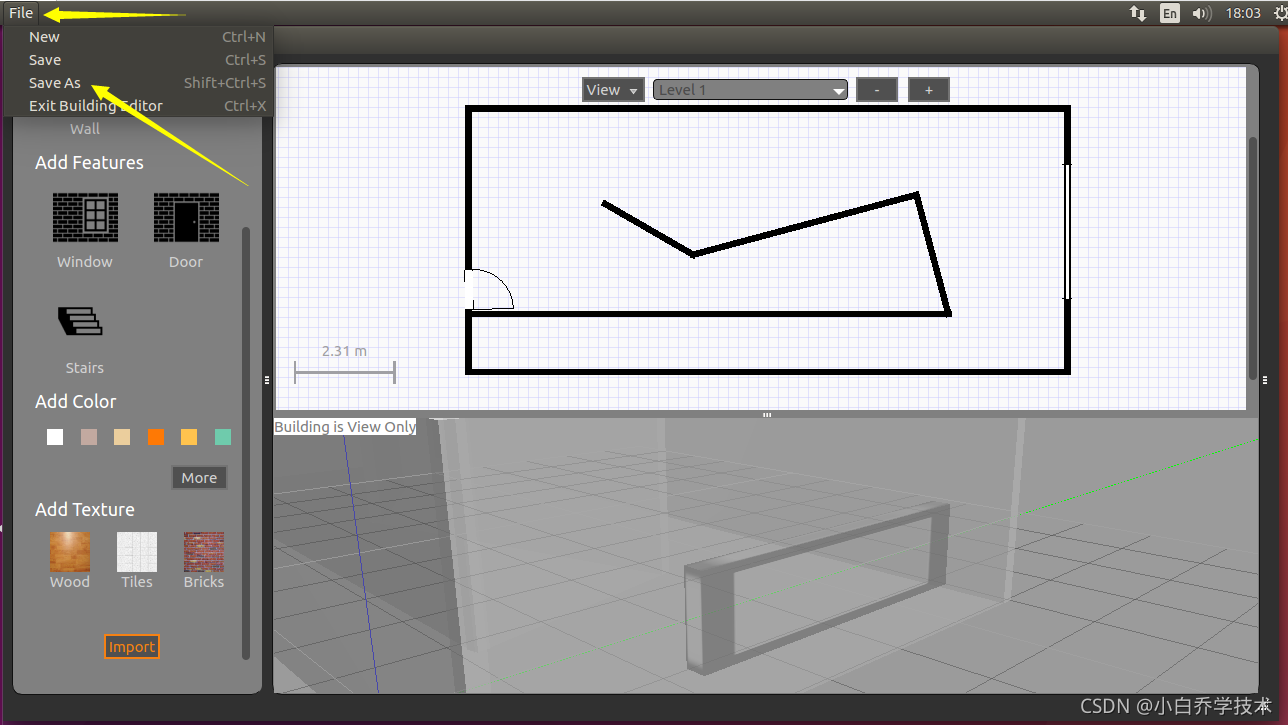
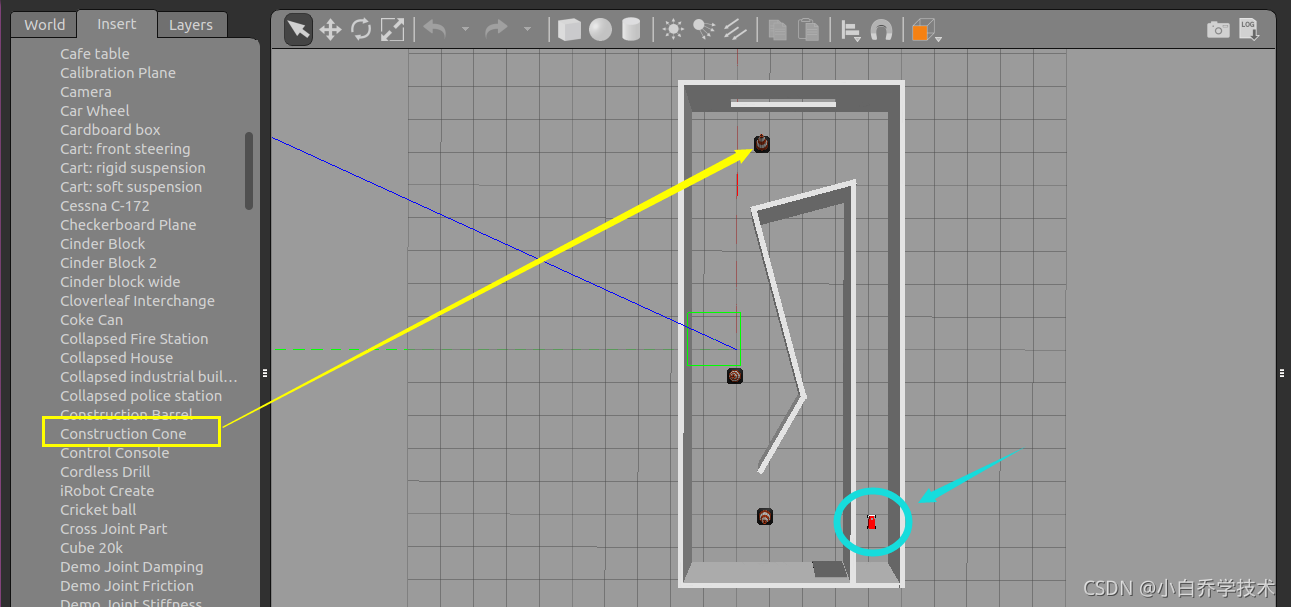
3、设计自己的环境
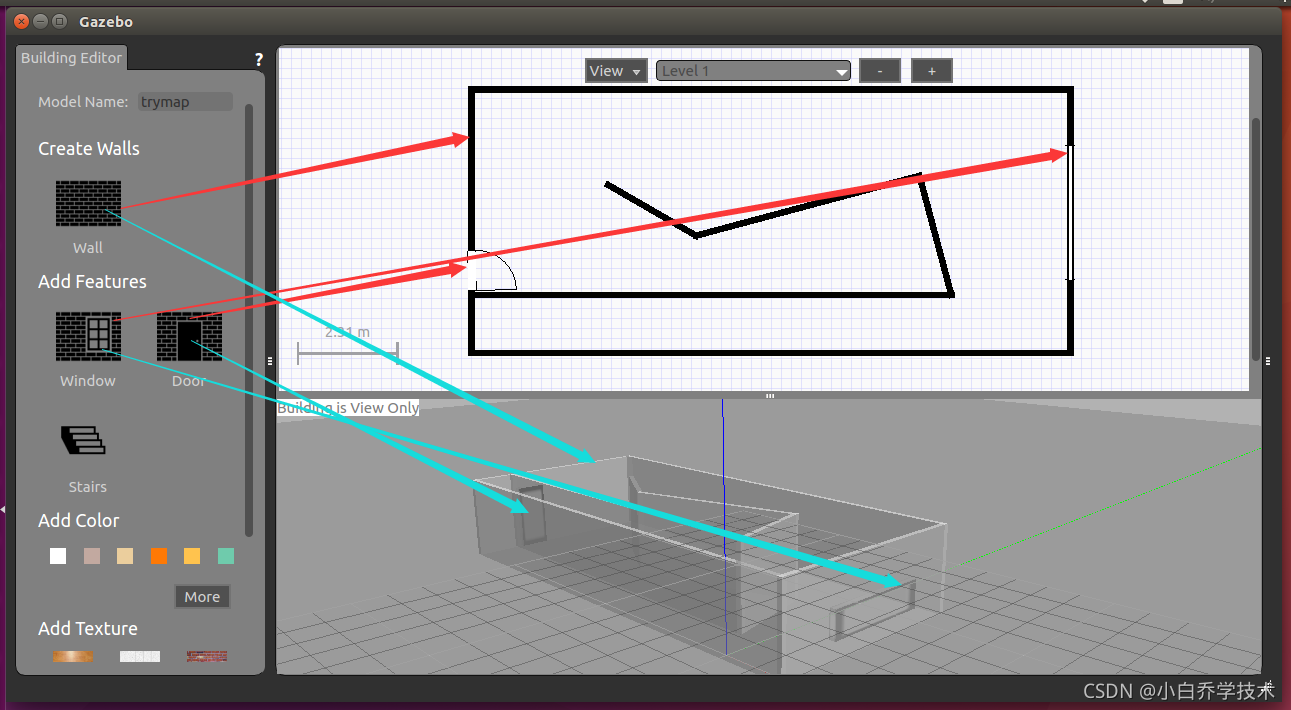
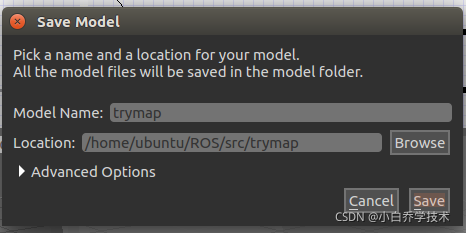
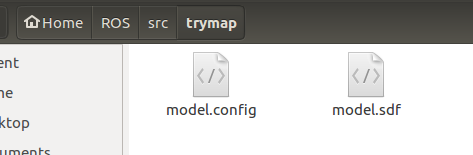
4、保存环境模型
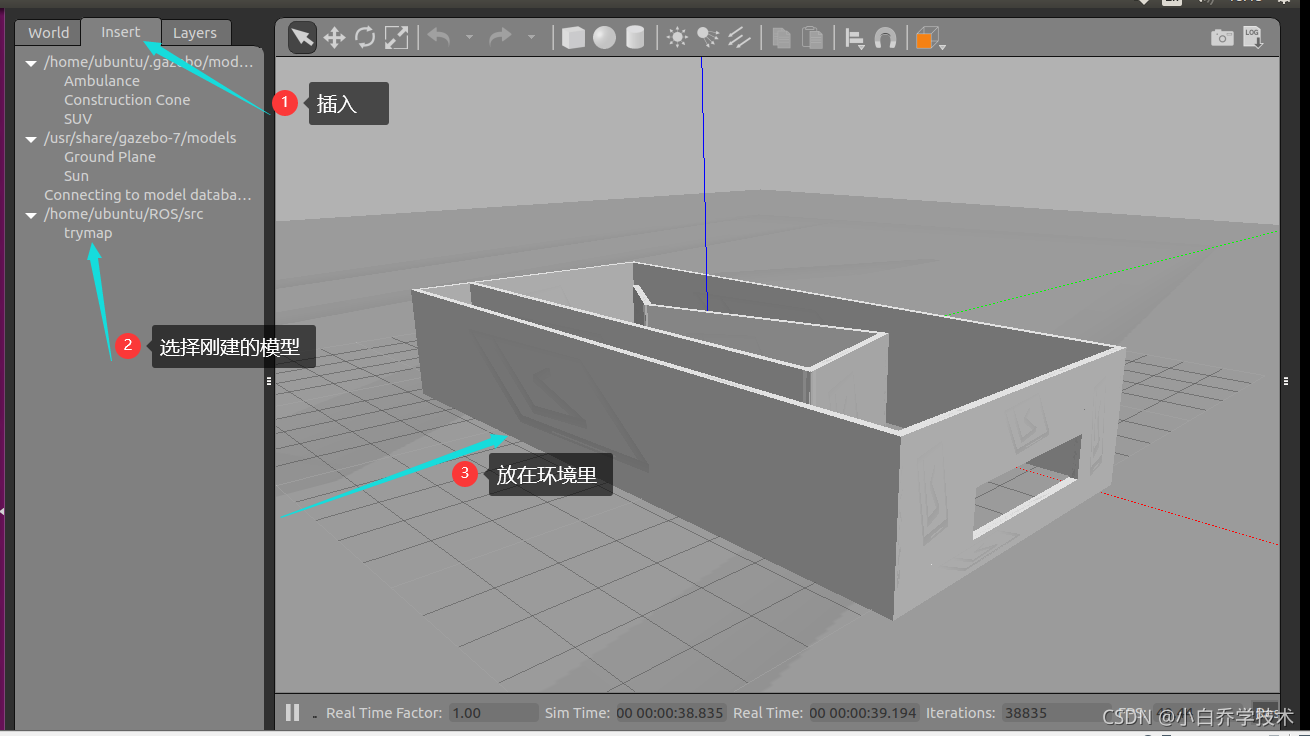
5、设置障碍物
先运行出小车模型
roslaunch racecar_gazebo racecar.launch
对准小车的地方放置刚自建的环境模型
刚开始放障碍物就会无限下沉直到见,结果就是看不到障碍物,但有显示加上了
所以尝试了一下先放障碍物,再放我绘制的墙,就可以了,不知道为什么
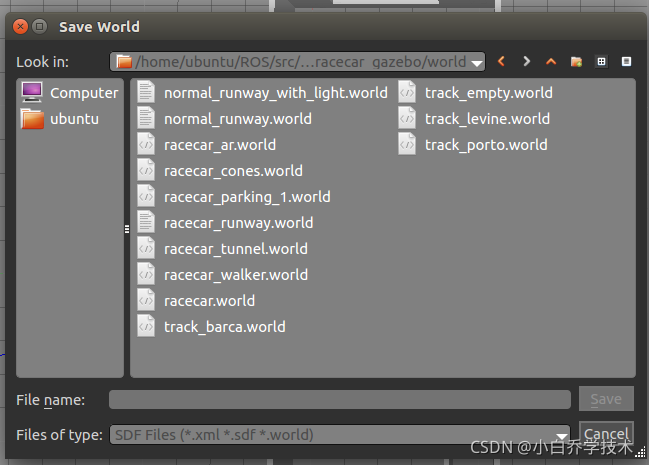
6、保存
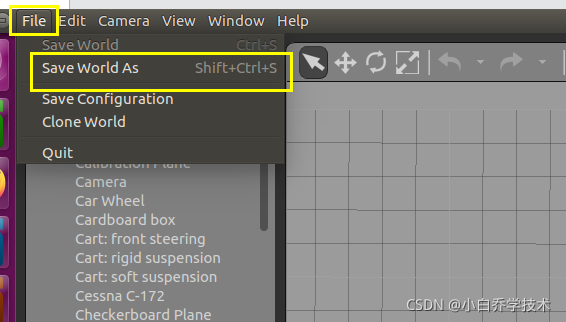
保存在ROS/src/racecar/racecar_gazebo/worlds路径下
7、创建并运行启动文件
在ROS/src/racecar/racecar_gazebo/launch路径下新建launch文件
cd ~/ROS/src/racecar/racecar_gazebo/launch
gedit try.launch
文件内容:
<?xml version="1.0"?>
<launch>
<include file="$(find racecar_gazebo)/launch/racecar.launch">
<arg name="world_name" value="try"/>
</include>
</launch>
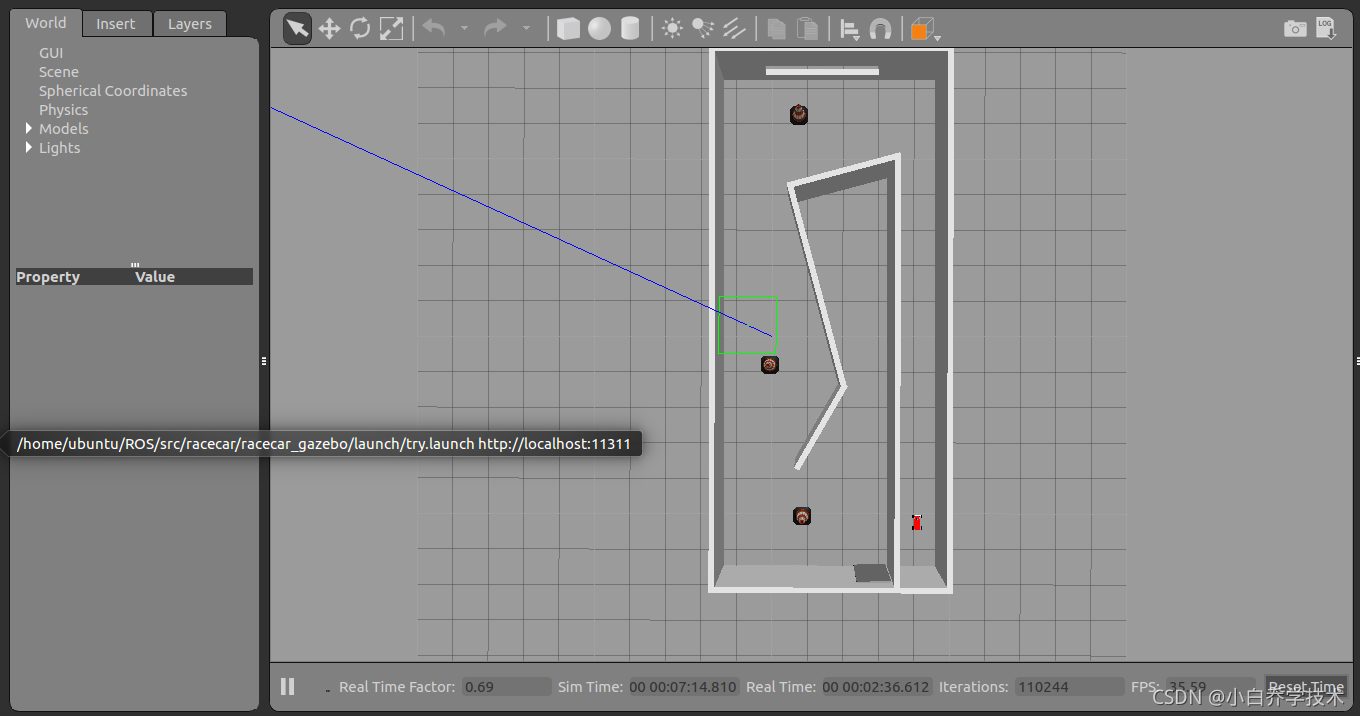
保存后开启新终端输入:
roslaunch racecar_gazebo try.launch
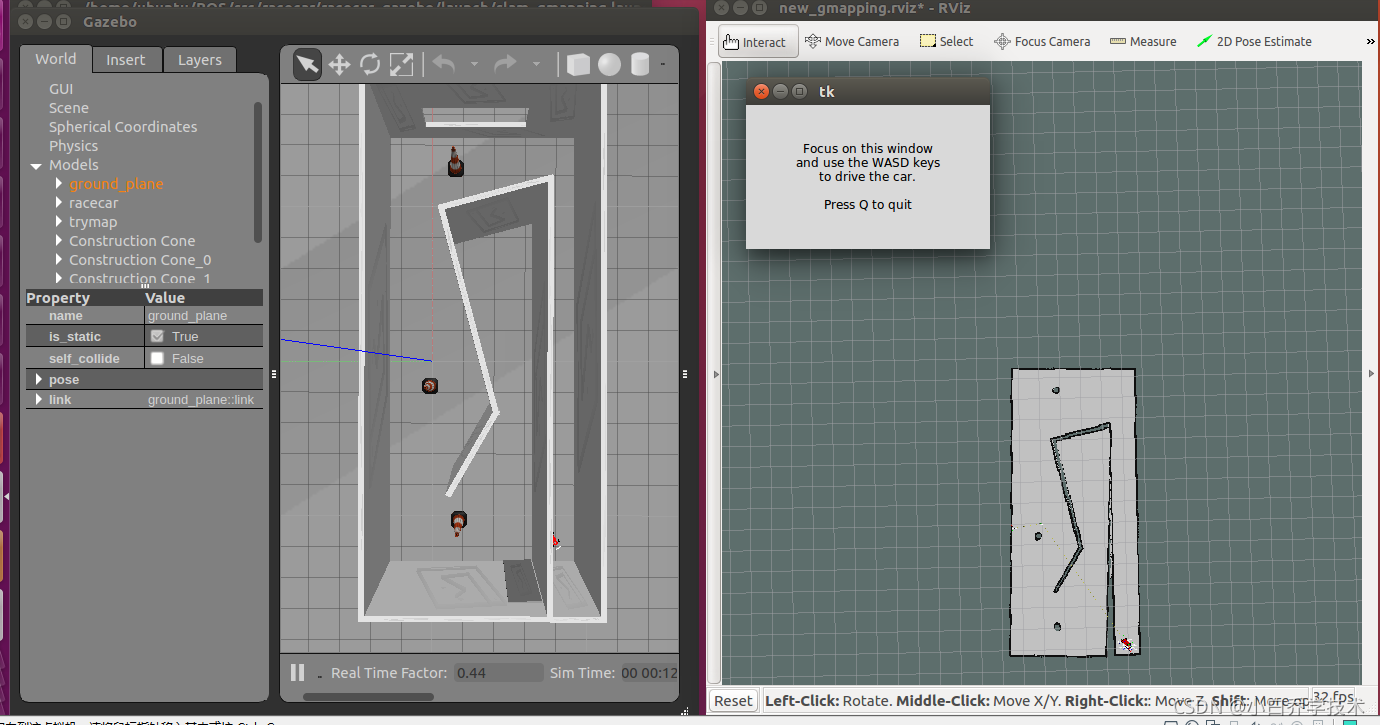
8、启动rviz绘制地图
新开启一个终端输入
roslaunch racecar_gazebo slam_gmapping.launch
控制小车跑完环境建出地图
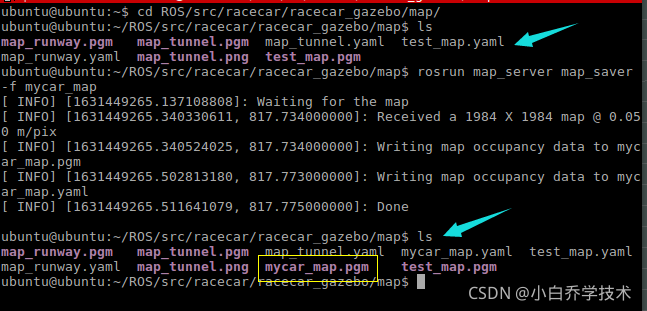
9、保存地图
cd ROS/src/racecar/racecar_gazebo/map/
rosrun map_server map_saver -f mycar_map
10、运行前准备
方法一:修改导航文件
这个办法用起来是有点小问题的,我还没想通,后续想通了会重新优化,建议用方法二
cd ROS/src/racecar/racecar_gazebo/launch
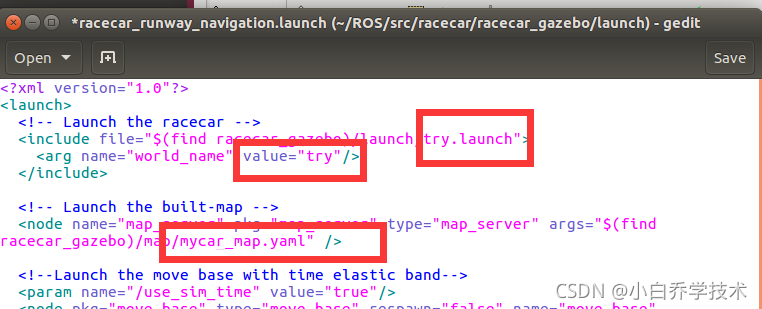
gedit racecar_runway_navigation.launch
将
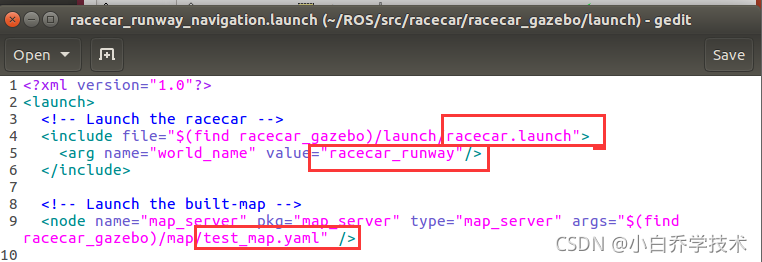
改为
方法二:新建launch文件
cd ~/ROS/src/racecar/racecar_gazebo/launch
gedit try2.launch
内容如下:
<?xml version="1.0"?>
<launch>
<!-- Launch the racecar -->
<include file="$(find racecar_gazebo)/launch/racecar.launch">
<arg name="world_name" value="try"/>
</include>
<!-- Launch the built-map -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find racecar_gazebo)/map/mycar_map.yaml" />
<!--Launch the move base with time elastic band-->
<param name="/use_sim_time" value="true"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find racecar_gazebo)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find racecar_gazebo)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find racecar_gazebo)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find racecar_gazebo)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find racecar_gazebo)/config/teb_local_planner_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="planner_frequency" value="0.01" />
<param name="planner_patience" value="5.0" />
<!--param name="use_dijkstra" value="false" /-->
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
<param name="controller_frequency" value="5.0" />
<param name="controller_patience" value="15.0" />
<param name="clearing_rotation_allowed" value="false" />
</node>
</launch>
11、启动导航
方法一启动
开启两个终端分别输入如下指令(建议用方法二的启动方式)
# 第一个指令:
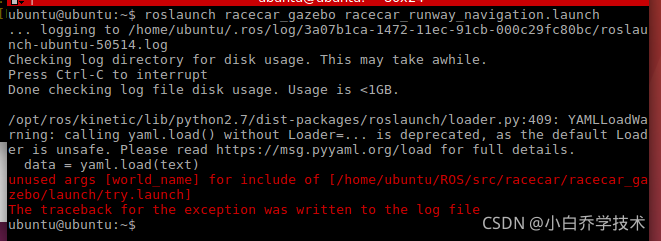
# 用下面这个指令启动显示找不到建模信息,但明明已经设定好了
roslaunch racecar_gazebo racecar_runway_navigation.launch
# 用下面这个指令启动gazebo时是正常的,但再启动rviz时是没有地图的
roslaunch racecar_gazebo try.launch
# 第二个指令
roslaunch racecar_gazebo racecar_rviz.launch
方法二启动
roslaunch racecar_gazebo try2.launch
roslaunch racecar_gazebo racecar_rviz.launch
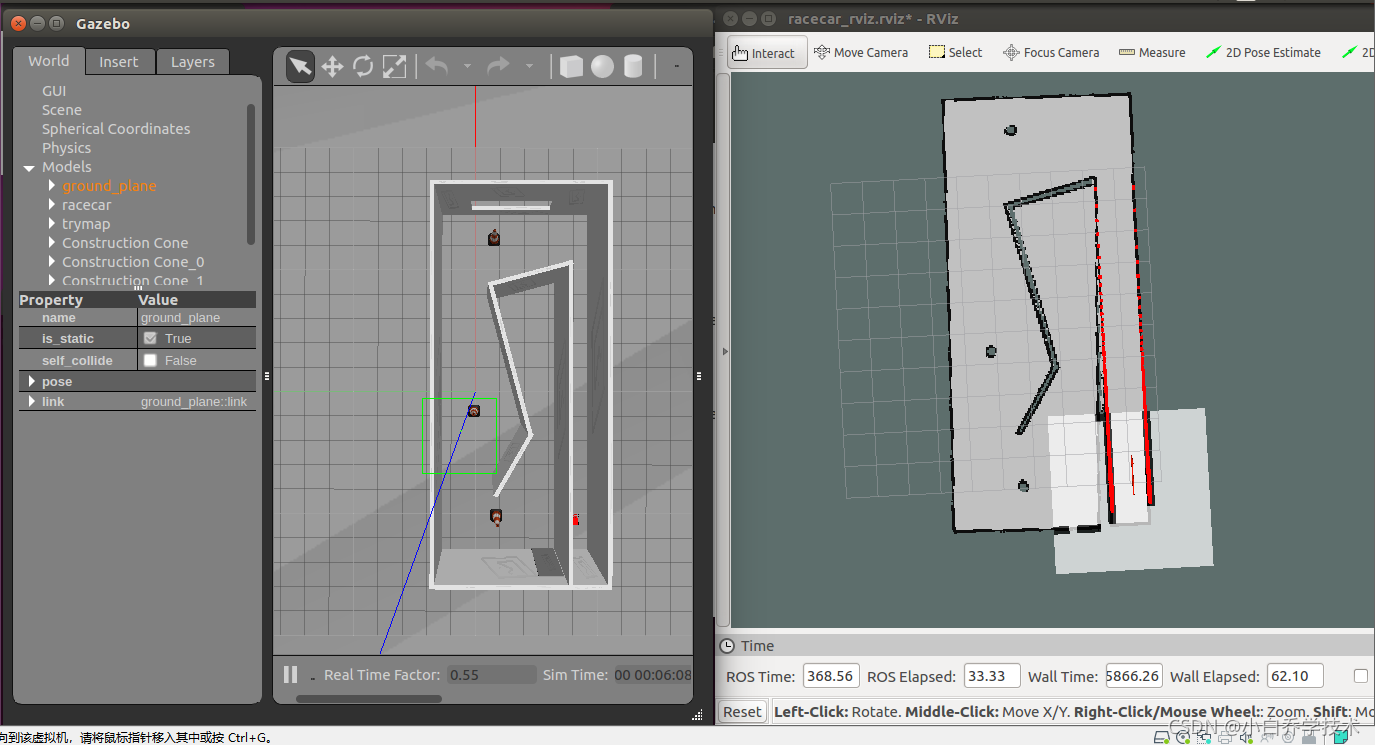
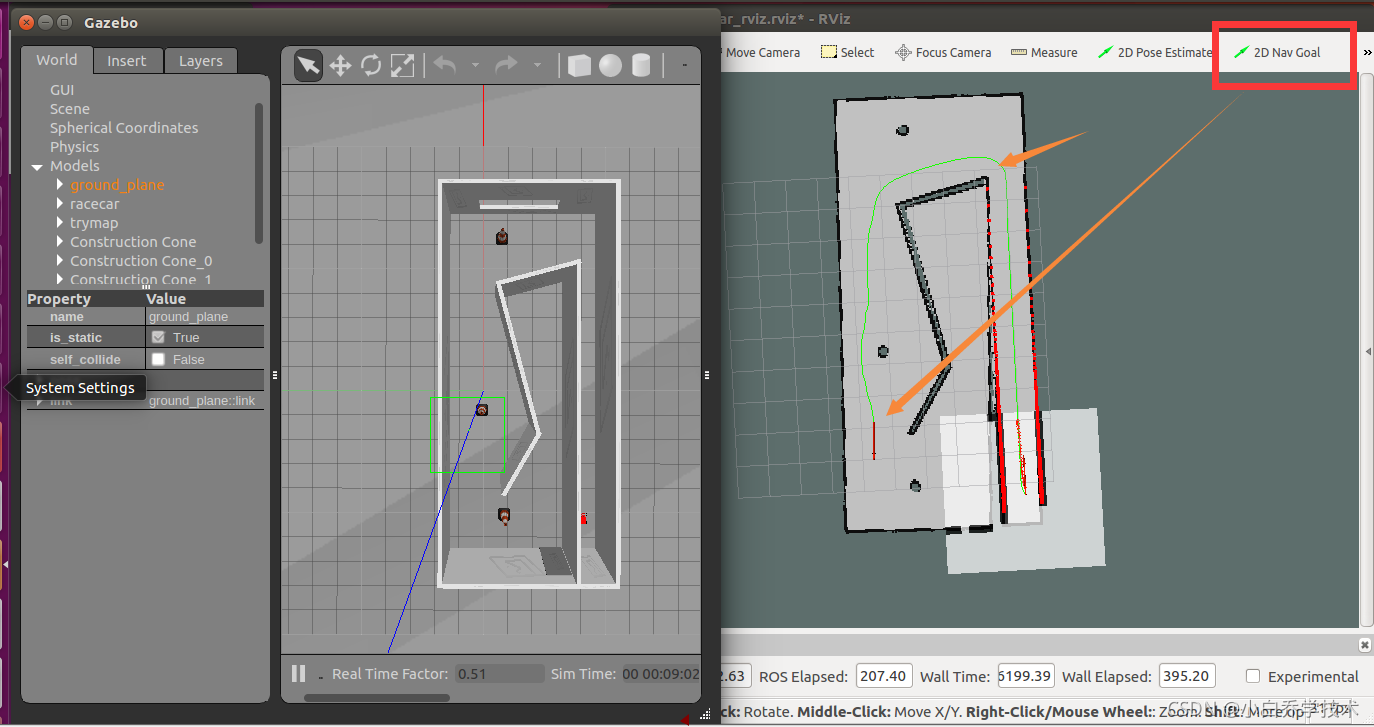
12、设置导航点
在rviz中使用2D Nav Goal设置目标
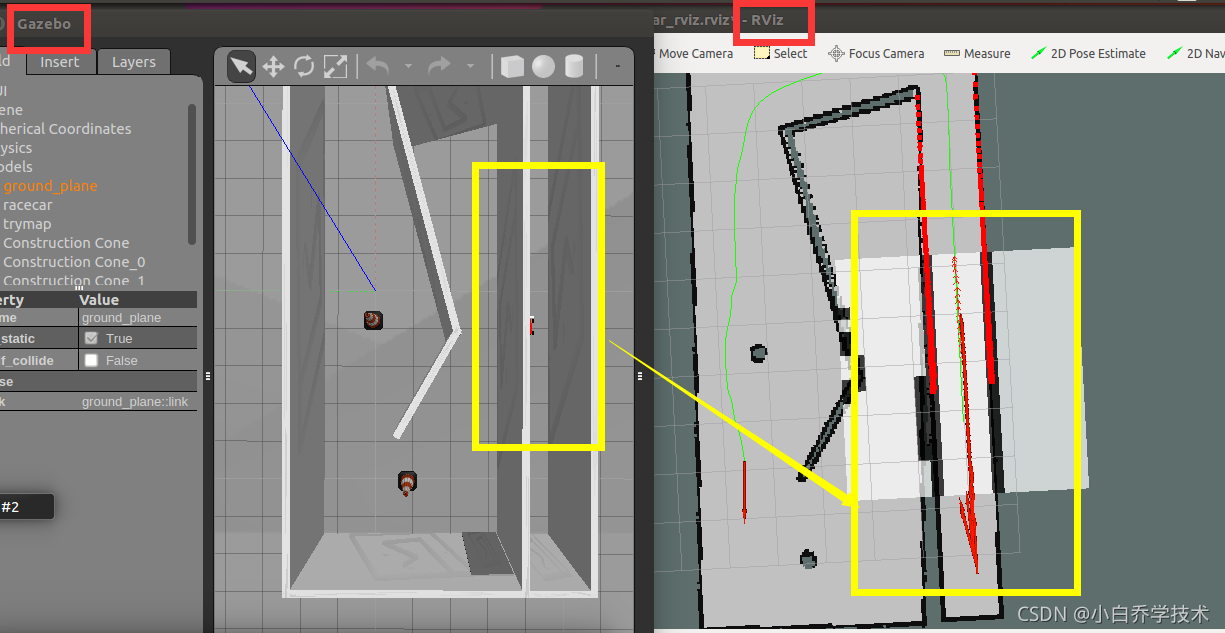
13、启动运行程序
rosrun racecar_gazebo path_pursuit.py

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









