






在运行moveit2的官方demo是会回报错:
[FATAL] [1726106709.804256624] [move_group_interface]: Group "" was not found.
这是因为:机器人的moveit::planning_interface与move_group_interface不完全相同,当使用官方的demo文件的时候默认是panda_arm机械臂,但是官网给的c++代码并不是panda_arm,而是manipulator
// Create the MoveIt MoveGroup Interface
using moveit::planning_interface::MoveGroupInterface ;
auto move_group_interface = MoveGroupInterface(node, "manipulator");如果大家不确定自己的是什么机械臂可以运行rviz的demo文件进行查看,将manipulator进行替换即可。官方的demo为panda_arm
ros2 launch moveit2_tutorials demo.launch.py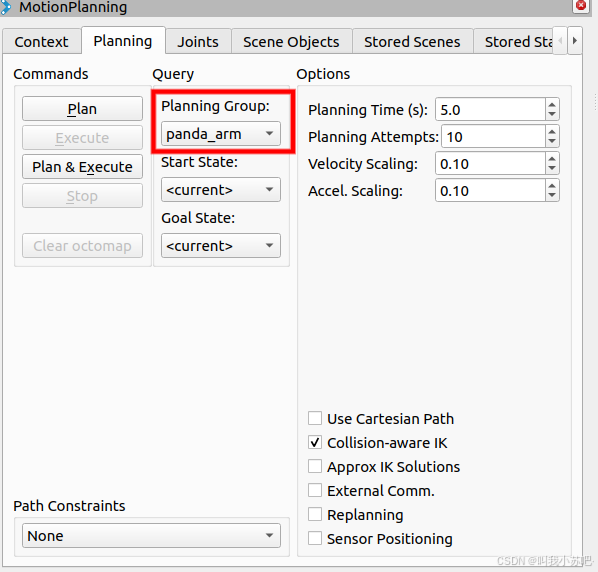

















 747
747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









