







 本文介绍了如何使用C++和OpenCV实现双边滤波和导向滤波,详细阐述了算法原理,并提供了关键代码段。通过盒式滤波器和积分图,实现了与窗口大小无关的时间复杂度。文章展示了滤波过程,特别是在边缘和平坦区域的效果,有助于理解这两种滤波方法在图像处理中的应用。
本文介绍了如何使用C++和OpenCV实现双边滤波和导向滤波,详细阐述了算法原理,并提供了关键代码段。通过盒式滤波器和积分图,实现了与窗口大小无关的时间复杂度。文章展示了滤波过程,特别是在边缘和平坦区域的效果,有助于理解这两种滤波方法在图像处理中的应用。
为了等快要遗忘时候再复习一遍!感谢大神总结:http://blog.csdn.net/pi9nc/article/details/26592377
上一篇文章已经说了引导滤波的基本理论,而且我们也知道引导滤波可以写出时间复杂度与窗口大小无关的算法,现在就来使用C++并借助OpenCV实现这一算法。
实现这种算法的关键思想是盒式滤波(box filter),而且必须是通过积分图来实现的盒式滤波,否则不可能与窗口大小无关,好在opencv的boxFilter函数满足这个要求。
再看看引导滤波的公式
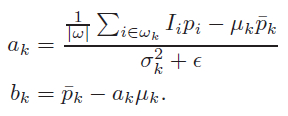
先计算a_k的分子,Ip 在窗口w_k中的和,再除以窗口中像素的个数,刚好就是盒式滤波,因此我们可以将输入的引导图像 I 和滤波图像 p 相乘,并对相乘后的图像做box filtering,即得第一项的结果。后面的

接下来计算a_k的分母部分。

因此在计算 I 的方差时,我们可以先计算 I*I 的均值,再减去 I 均值的平方即
注意,我们的计算都是对整个图像的,以图像为单位进行计算,所以最后算出的也是两张图,a_k的图(左边)和b_k的图(右边),如下


在图中可以看到,在边缘部分或变化剧烈的部分,a的值接近于1(白色),b的值接近为0(黑色),而在变化平坦的区域,a的值接近0(黑色),b的值为平坦区域像素的均值。这与上一篇文章中所说的规律是一致的。
下面看第二个公式
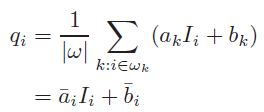
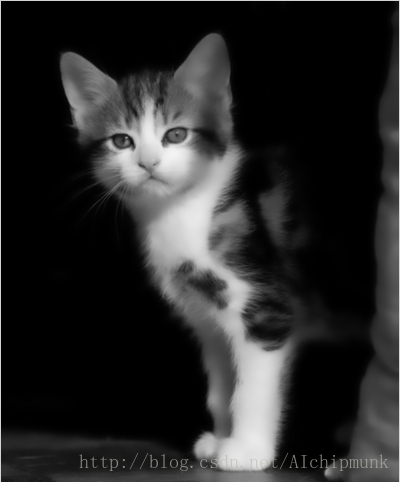
输出值q又与两个均值有关,分别为a和b在窗口w_i中的均值(不是w_k),所以还是box filtering,我们将上一步得到两个图像都进行盒式滤波,得到两个新图:a_i和b_i,然后用a_i乘以引导图像 I ,再加上b_i,即得最终滤波之后的输出,如下(左边为原图,右边为滤波之后的图像,其中滤波窗口半径为8,e的值为500):

下面是整个算法的代码,仅供参考
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1968
1968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









