








 超级会员免费看
超级会员免费看

 本文详细介绍了AUTOSAR中的时间同步,重点探讨了TS在自动驾驶中的重要性,CP和AP时间同步的区别,以及1588 PTP的一步法和两步法。此外,还讲解了时间纠正计算、时间验证功能及其在确保网络中设备时间一致性中的作用。
本文详细介绍了AUTOSAR中的时间同步,重点探讨了TS在自动驾驶中的重要性,CP和AP时间同步的区别,以及1588 PTP的一步法和两步法。此外,还讲解了时间纠正计算、时间验证功能及其在确保网络中设备时间一致性中的作用。
1.TS典型应用场景
时间同步,典型应用就是在自动驾驶领域,自动驾驶领域涉及到各个传感器的数据采集,如IMU采集当前车身姿态和运动信息,毫米波雷达-超声波雷达-环视摄像头-前视摄像头...等等传感器捕获的数据,在算法中需要精确知道每个数据的采集时间,这样在融合时,才能确切知道使用哪个时刻的数据。
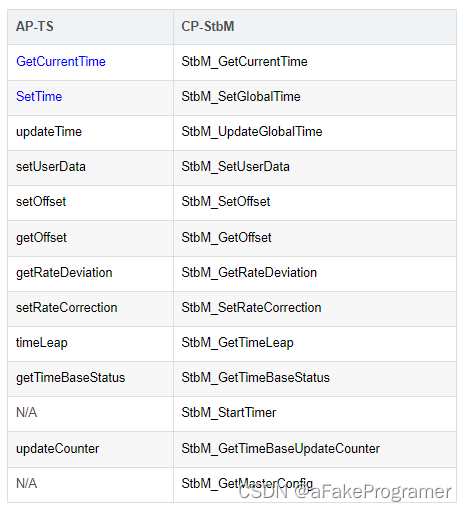
2.CP和AP时间同步对比
接口对比
3.时间同步基础知识
关于车载 时间同步 的理解_adas时间同步的频率_AgingMoon的博客-CSDN博客
4.TBR部分参数说明
TBR的状态位
通过GetSynchronizationStatus 获取,包括:
kNotSynchronizedUntilStartup,指示在启动之前是否发生了时基与其相应 TBR 的同步
kTimeOut,指示时基与其对应 TBR 的同步是否丢失或延迟;
kSynchronized, 指示相应 TBR 的时基是否已与其时间源至少成功同步一次
kSynchToGateway,指示相应的 TBR 更新是否基于 Global Time Master 下面的时间网关。
TBR的默认值
激活状态标志,应为 invalidated;
时钟更新值,应为0;
用于数据默认是删除的;
时间跳跃值应被reset。
时间同步🕒的一步法和两步法是IEEE 1588精确时间协议(PTP)中定义的两种不同的时间戳方法。它们都用于在网络中的设备之间同步时间,但各有特点和应用场景。
一步法(1-Step):
在一步法中,时间戳直接包含在同步消息中。这意味着网络设备在发送同步事件消息时,会立即在消息中加入一个准确的时间戳。
这种方法的优点是从设备端更简单,因为它只需要接收一条消息就可以设置自己的时间。
但这也意味着主时钟必须能够即时修改同步消息中的时间戳,这可能会导致消息发送的延迟。
两步法(2-Step):
两步法则是在发送同步消息后,在单独的消息中发送时间戳。
这种方法在发送端或主端更容易实现,因为它不需要在消息离开时将时间戳写入消息,这可以使主时钟在硬件方面更加经济。
两步法的另一个优点是增加了灵活性,可以在不改变硬件的情况下改变数据包的编码方式。
在实际应用中,选择一步法还是两步法取决于网络的具体需求和设计。
例如,如果使用的是10Gigabit或更高速度的以太网链路,可能会倾向于使用两步法,因为以更高比特率编码消息的时间有限。
(1) 【虹科】时间同步:单步时钟还是双步时钟? - 知乎专栏. https://zhuanlan.zhihu.com/p/454477822.
(2) 1588 1-Step 和 2-Step PTP 之间有什么区别?_1588 一步法 两步法-CSDN博客. https://blog.csdn.net/star871016/article/details/119206881.
(3) 1588 1-Step 和 2-Step PTP 之间有什么区别?_1588 一步法 两步法-CSDN博客. https://bing.com/search?q=%e6%97%b6%e9%97%b4%e5%90%8c%e6%ad%a5%e7%9a%84%e6%96%b9%e6%b3%95+%e4%b8%80%e6%ad%a5%e6%b3%95+%e4%b8%a4%e6%ad%a5%e6%b3%95.
(4) 双抗体夹心一步法及两步法测HBsAg 的结果分析 - 丁香园. http://infect.dxy.cn/article/22580.
5. TS功能说明
5.1 基本说明
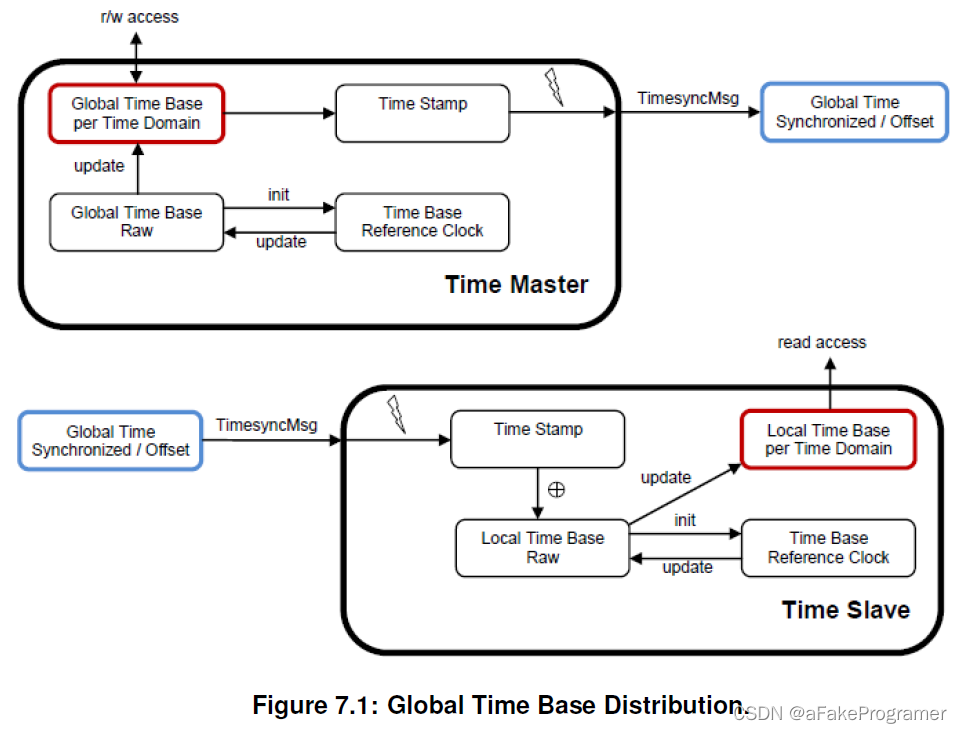
时间网络中,应有一个Time Master,和至少一个Time Slave .其中Time Slave 根据接收到Time Master 的同步消息,进行时间对齐。
用的比较少的用户数据说明:
用户数据是每个时基的一部分。 用户数据由每个时基的 Global Time Master 设置,并作为 Timesync 消息的一部分分发。用户数据可用于表征时基,例如,关于基础时钟源的质量或关于时间的进展。用户数据由字节向量组成。 由于各种 Timesync 消息的帧格式,可能无法在每个总线系统上传输完整的向量。系统设计人员有责任仅使用向量中可以分布在车辆网络内的那些用户数据字节。
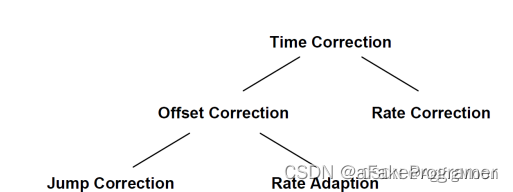
5.2 时间纠正计算说明
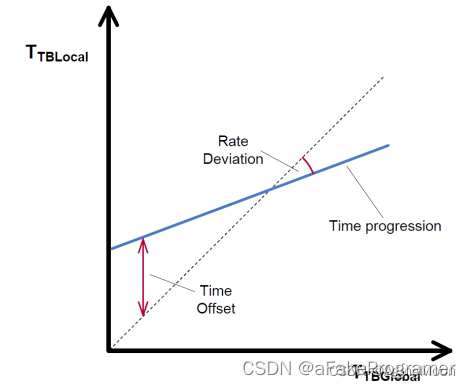
rate偏差:指时间在本地时基和全局时基实例中以不同的速率前进。
例如,如果本地硬件参考时钟由由于制造公差和/或热效应而导致频率关闭的晶体驱动,则可能会发生这种偏差。
时间偏移:指时基的本地实例和全局时基没有精确同步。 当本地硬件参考时钟的速率不准确并且与全局时基的同步受到抖动效应、软件延迟和计数器粒度的影响时,就会出现这种偏差。
rate 校正:速率校正校正本地硬件参考时钟的速率偏差。 这种校正是通过一个乘法校正因子来完成的,该因子在时钟的预配置速率之外使用。 速率校正确定测量范围内的校正因子。 然而,该校正因子不是固定的,而是在每次成功测量后更新。
Rate Correction 的工作原理不是为了让它以正确的速率前进而调整本地硬件参考时钟。 相反,速率校正仅在读取时实时校正时基的本地实例的值。
公式:rrc = (TGStop - TGStart) / (TVStop- TVStart)
offset 校正:偏移校正校正绝对时间偏差(偏移)。 根据偏移量的大小和 StbM 的配置,该校正可以通过跳跃校正或速率自适应来执行。 偏移校正独立于速率校正。 每次将时基的本地实例同步到其全球时基时都会执行此操作。
Jump Correction 通过将偏移量添加到 Time Base 的本地实例(相当于接管 Global Time Base 的值),一步校正绝对时间偏移量。
5.3 时间验证
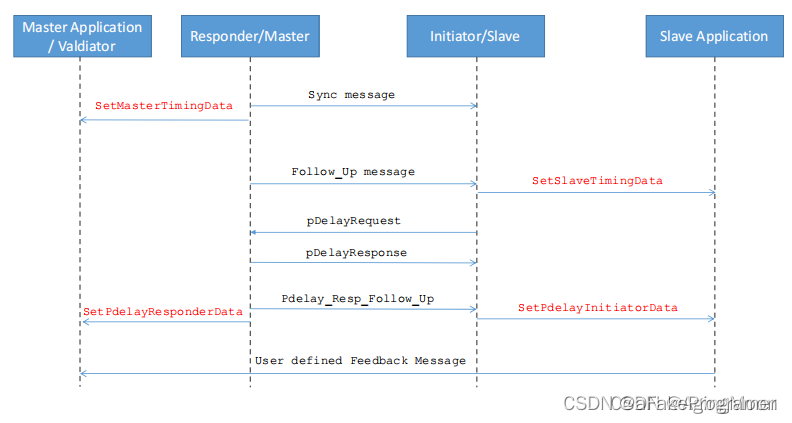
Time Slave 收集有关时间同步过程的信息以进行预测,并检查 Master 和 Slave 是否允许当前时间。
预测本身将由单独的应用程序进行本地分析,以检测任何现有的时间偏差。
此外,来自time master 和 time slave 时间同步过程信息也与Validator 应用程序共享,该应用程序可以在网络中的任何位置运行,例如关于全局时间的所有者。
Validator 使用通过用户定义的反馈通道从time master 和time slave 接收到的时间同步过程信息来重构整个同步过程并检查在所有对等体之间建立了一致的时间基准。
时间验证功能仅向应用程序提供 API。反馈通道和相应应用程序执行的实际验证在 AUTOSAR 中没有标准化。
原文链接:https://blog.csdn.net/AgingMoon/article/details/123613959

















 3185
3185

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









