







 本文档记录了ROS学习过程中的深蓝课程第二次作业,涉及多个终端的交互操作。通过运行`roscore`,`turtlesim_node`,以及不同homework的rosrun命令,进行ROS通信与控制的练习。在第四终端中,使用`rosservice call`与`turtle_command`服务交互,控制海龟的运动状态。
本文档记录了ROS学习过程中的深蓝课程第二次作业,涉及多个终端的交互操作。通过运行`roscore`,`turtlesim_node`,以及不同homework的rosrun命令,进行ROS通信与控制的练习。在第四终端中,使用`rosservice call`与`turtle_command`服务交互,控制海龟的运动状态。
深蓝课程第二次作业
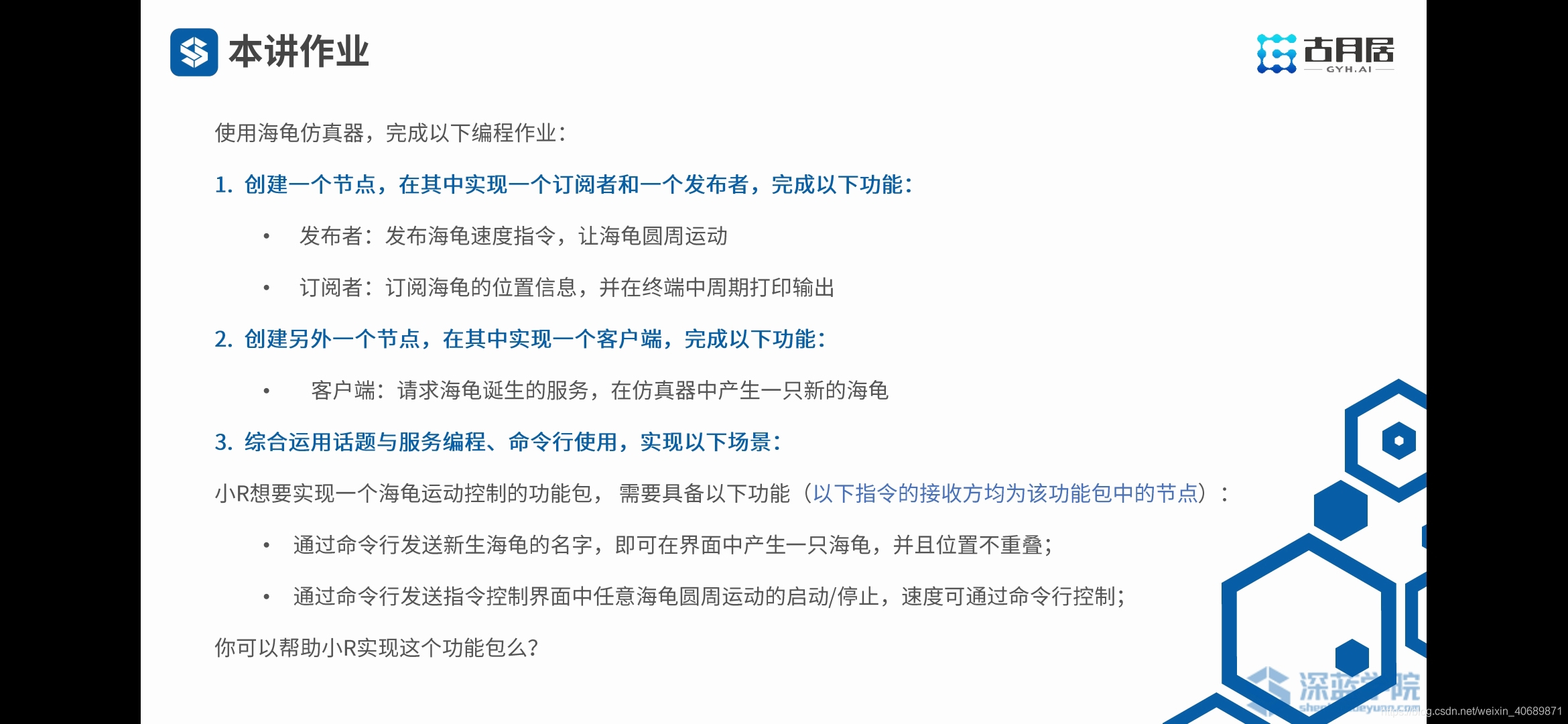
第一题
#include <ros/ros.h>
#include <geometry_msgs/Twist.h> //描述发布海龟速度指令的消息结构的头文件
#include "turtlesim/Pose.h" //描述海龟位置的消息结构的头文件
//创建消息类型为turtlesim::Pose的常数指针position
void circle_callback(const turtlesim::Pose::ConstPtr& position)
{
//终端显示海龟实时位置的信息
ROS_INFO("the position of this turtle is: x:%0.4f, y:%0.4f", position->x, position->y);
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "homework1");
// 创建节点句柄
ros::NodeHandle n;
// 使用ros::Publisher这个类实例化circle_pub对象,从而创建发布者circle_pub,订阅/turtle1/cmd_vel这个话题,消息类型为geometry_msgs::Twist,队列长度为10
ros::Publisher circle_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 使用ros::Subscriber这个类实例化circle_sub对象 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 880
880

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









