







 超级会员免费看
超级会员免费看
文章目录
知识目标
- 掌握机器人描述格式(SRDF)的概念;
- 掌握MoveIt!设置助手的使用流程
1.SRDF
语义机器人描述格式(Semantic Robot Description Format)是对URDF的补充,并指定了关节组、默认机器人配置、额外的碰撞检查信息以及完全指定机器人姿势可能需要的额外变换。生成SRDF的推荐方法是使用MoveIt!设置助手。
SRDF是一个纯文本的文件,可以通过文本编辑器查阅。SRDF文件包含的标签很多,几个关键的标签定义示例如下:
1.整个文档的根标签,所有的信息都包含在这个标签下。
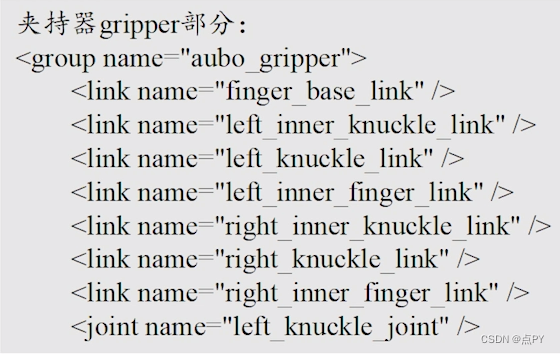
2.对应一个规划组,呈现了组里的关节,连杆等。

3.<group_state>预设位姿信息,在这个标签下可以查看到具体的关节角度信息。
<

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1178
1178

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











