








 超级会员免费看
超级会员免费看

本篇根据 ROS图像的Deeplab v3+实时语义分割(ROS+Pytorch)进行踩坑记录,并附加一些对应操作的理解。(自觉有很多理解不到位的地方,若有大佬路过还请不吝赐教!)
正文 (跑通代码看这里)
首先,上面那篇文章写的非常好!代码也很nice,本文对其代码进行了稍微改动了一下,gitee地址
本代码主要针对ubuntu 18.04,ros-melodic版本;
ubuntu20.04的ros-noetic因为自带python3,有可能没这么麻烦。
改源码路径
首先找到Img_seg_ros/predict.py,修改python路径,注意版本(这部分我有改动,请参考本文提供的代码)
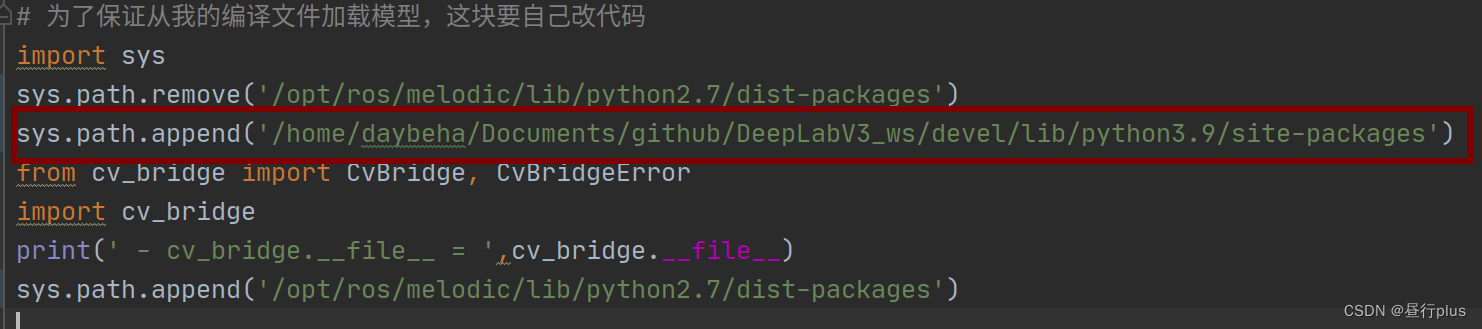
另外修改图像话题名称img_topic,和pth模型路径ckpt。

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











