






- 反馈线性化:
反馈线性化是一种控制系统设计方法,其目标是通过状态空间的坐标变换和控制变换,使得非线性系统的输入-状态映射或输入-输出映射反馈等价于线性系统。这样,就可以应用线性系统的控制理论来实现非线性系统的控制。在机器人控制中,反馈线性化特别适用于处理那些具有复杂非线性特性的系统,如柔性关节机器人。
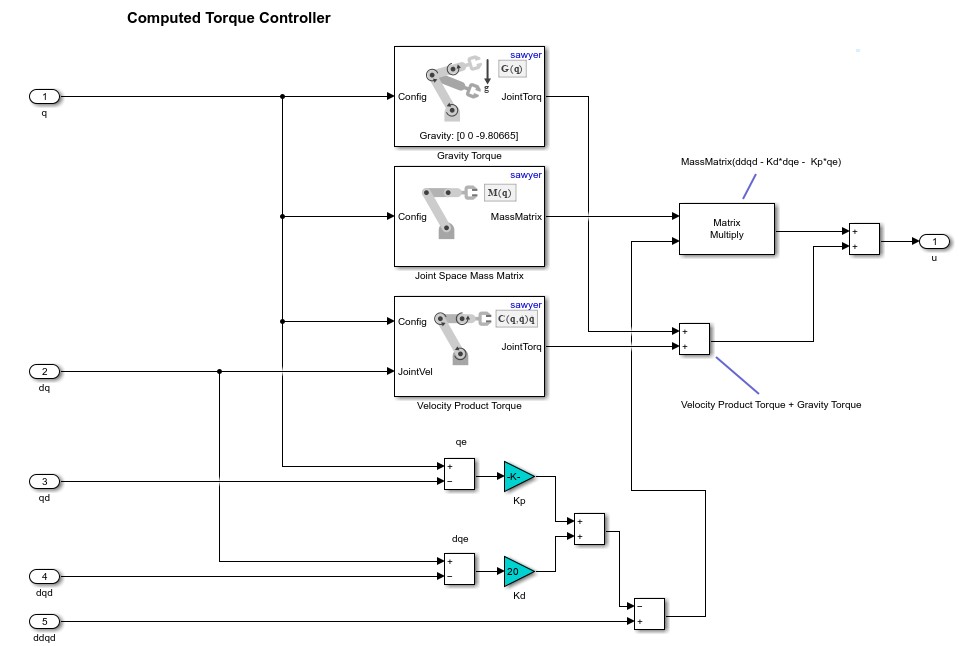
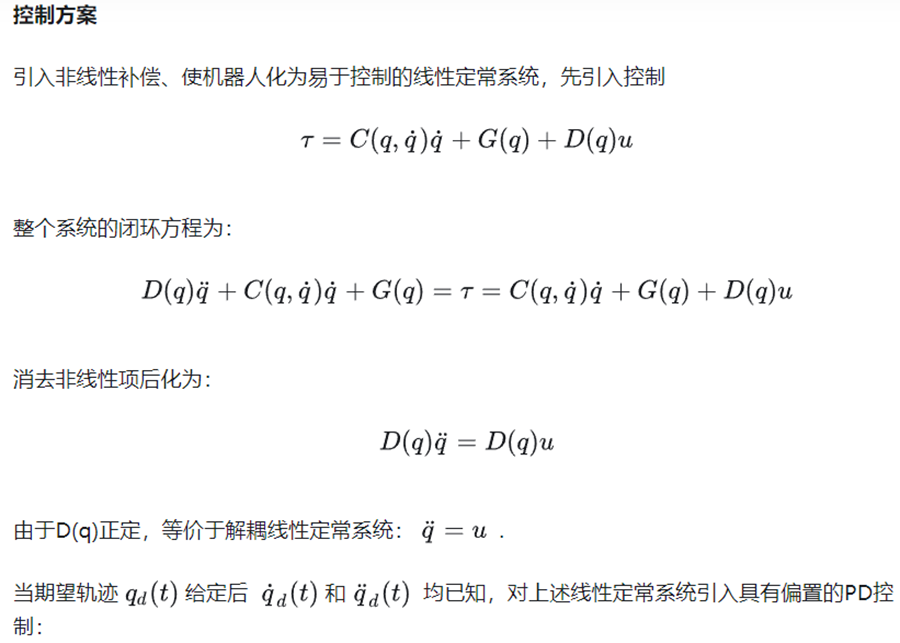
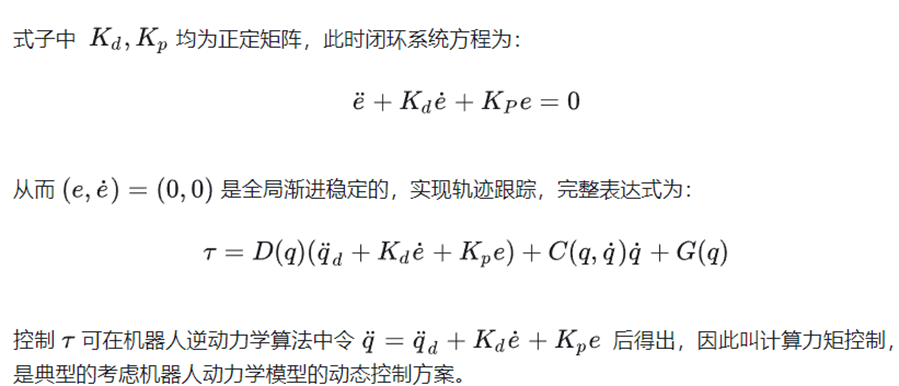
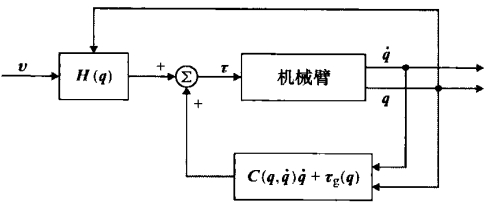
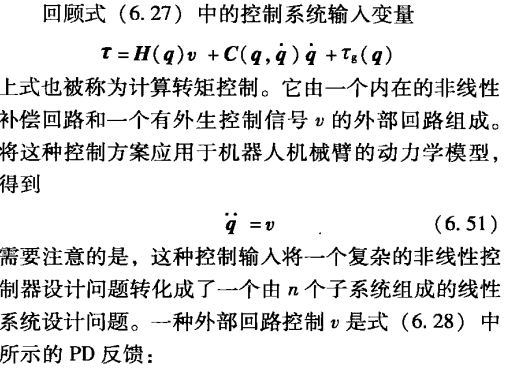
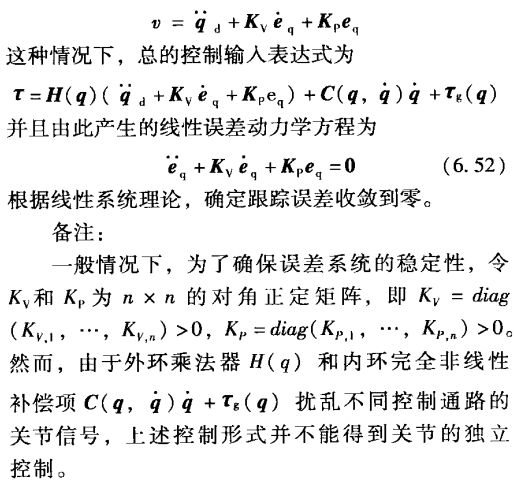
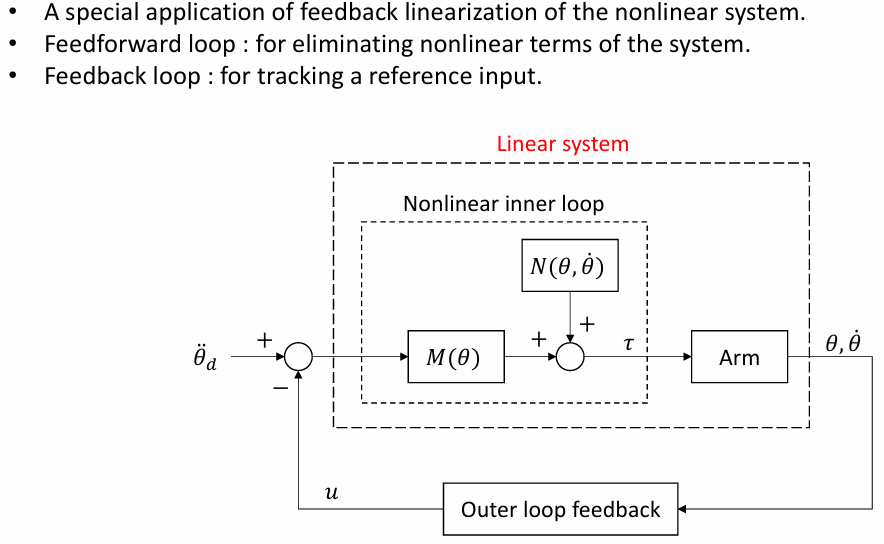
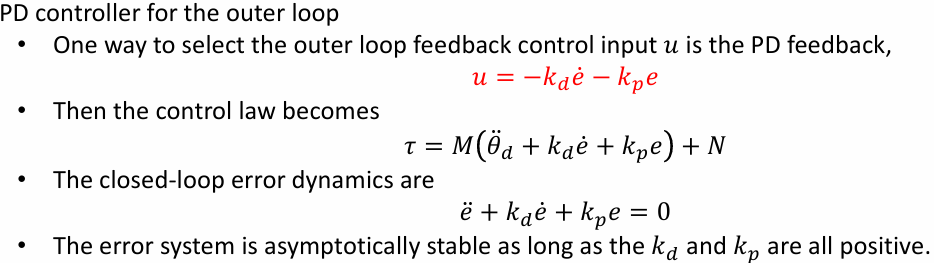
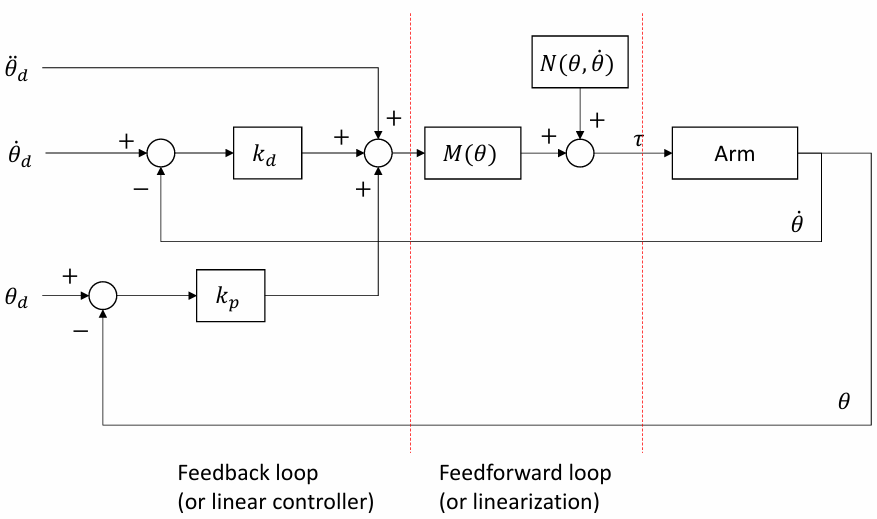
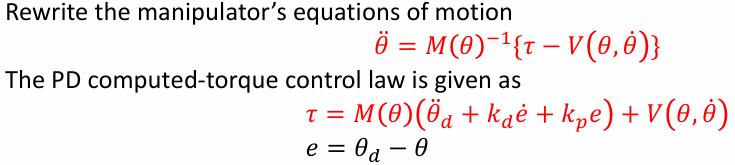
- 计算力矩控制(逆向动力学控制):
计算力矩控制(CTC)是在已建立的机器人动力学模型基础上,使机器人各关节的动力学模型得到线性化,并除去关节之间的耦合,使得每一关节均可采用相当成熟的线性控制策略。这种方法又称为逆动力学控制,能够确保全局指数稳定或全局渐近稳定的轨迹跟踪。计算力矩控制通过非线性补偿对具有复杂的非线性强耦合系统的并联机器人进行了全局性解耦和线性化,与反馈线性化在理论和实践上都有密切的联系。
- 动力学前馈补偿:
动力学前馈补偿是一种控制系统设计方法,用于提高系统的稳定性和性能表现。它利用系统非线性部分的特性,预先添加一个控制信号,以抵消未来预测到的干扰信号或参考信号。这有助于减少误差,并提高系统的响应速度和稳定性。在机器人控制中,动力学前馈补偿常用于处理那些由于机器人动力学特性导致的误差和不稳定性。
这些控制方法之间的关联主要体现在它们都是为了提高机器人控制系统的性能而设计的。反馈线性化和计算力矩控制都致力于将非线性系统转化为线性系统,以便应用成熟的线性控制理论。而动力学前馈补偿则通过预先计算并抵消干扰信号来提高系统的稳定性和性能。这些控制方法通常可以结合使用,以实现对机器人系统的更精确和更稳定的控制。例如,在机器人轨迹跟踪控制中,可以首先使用反馈线性化或计算力矩控制将系统线性化,然后结合动力学前馈补偿来进一步提高系统的性能。
![]()
——————————————————————————————————
20240521
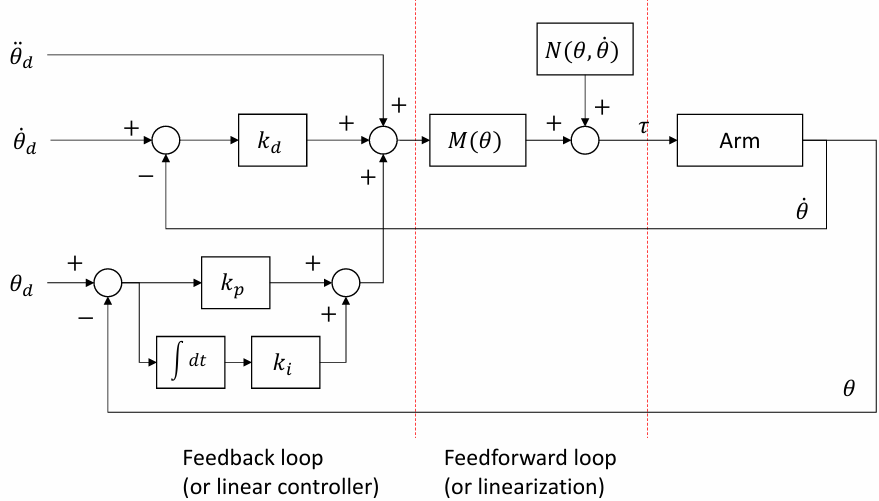
加入积分控制后:



















 9924
9924

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









