







1. 激光雷达
激光雷达(LiDAR)是以激光脉冲为探测器,通过测量激光反射回来的时间来计算距离和形态,实现远距离高精度测距的一种设备。
2. 激光雷达分类
2.1. 机械式
可以对周围环境进行360度的水平视场扫描,拥有更高的分辨率和测距距离,但体积大、成本高、装配难度大。
典型的产品有Velodyne,禾赛潘多拉。
2.2. 混合固态
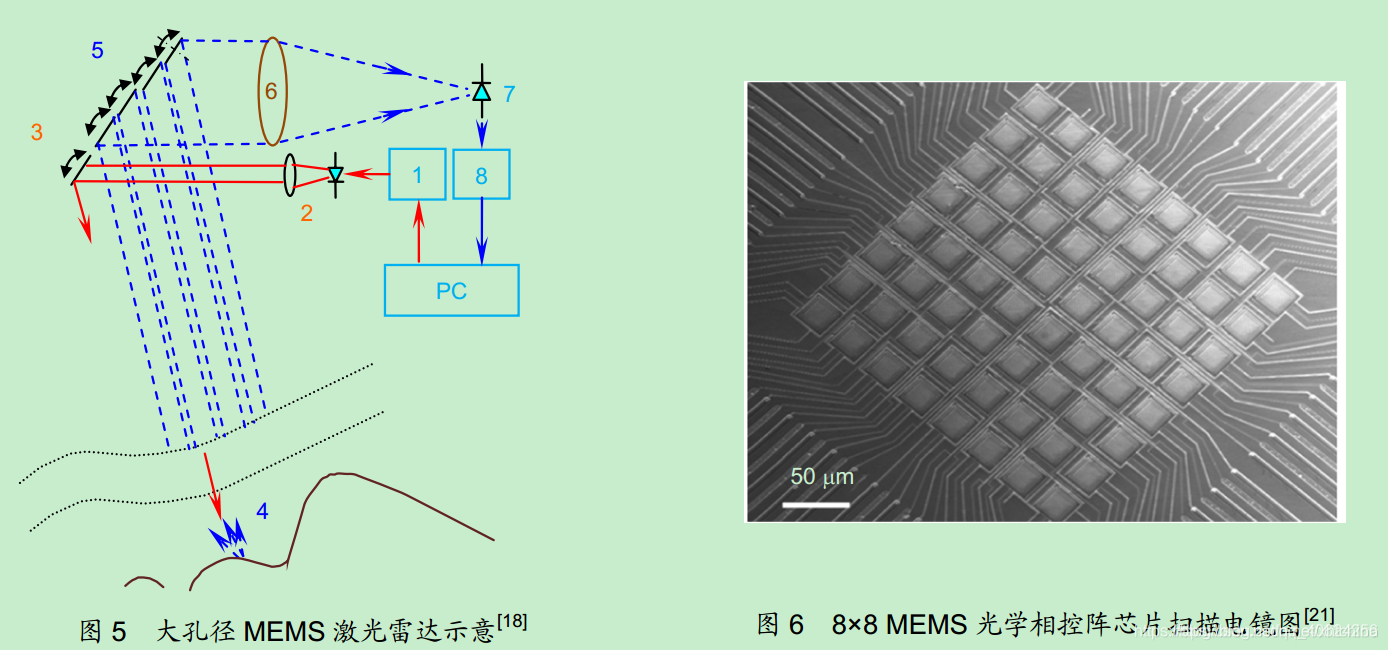
分为转镜、MEMES 微振镜、棱镜三种,成本大幅降低,扫描效率更高,可靠性更强,快速上车成共识。但运动复杂、转动频率高、寿命有限。
但近年来,一些非完全旋转的激光雷达也被统称为“固态激光雷达”,它们具备了固态激光雷达很多的性能特点,如分辨率高、有限水平FOV(前向而不是360°)等,但这些技术方案会有一些微小的移动部件,从严格意义上来说不能算 纯固态激光雷达。
转镜:华为、法雷奥、禾赛、Luminar、Innovusion
棱镜:Livox
2.3. 全固态(所有部件都是固定的,有OPA和FLASH两种方案)
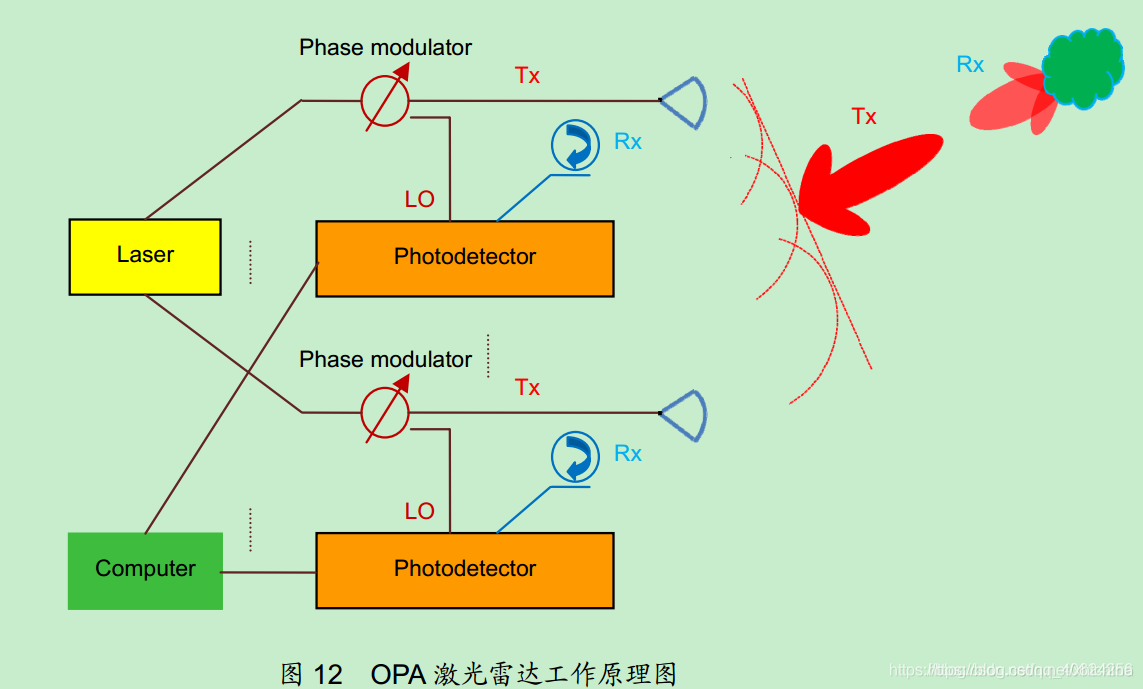
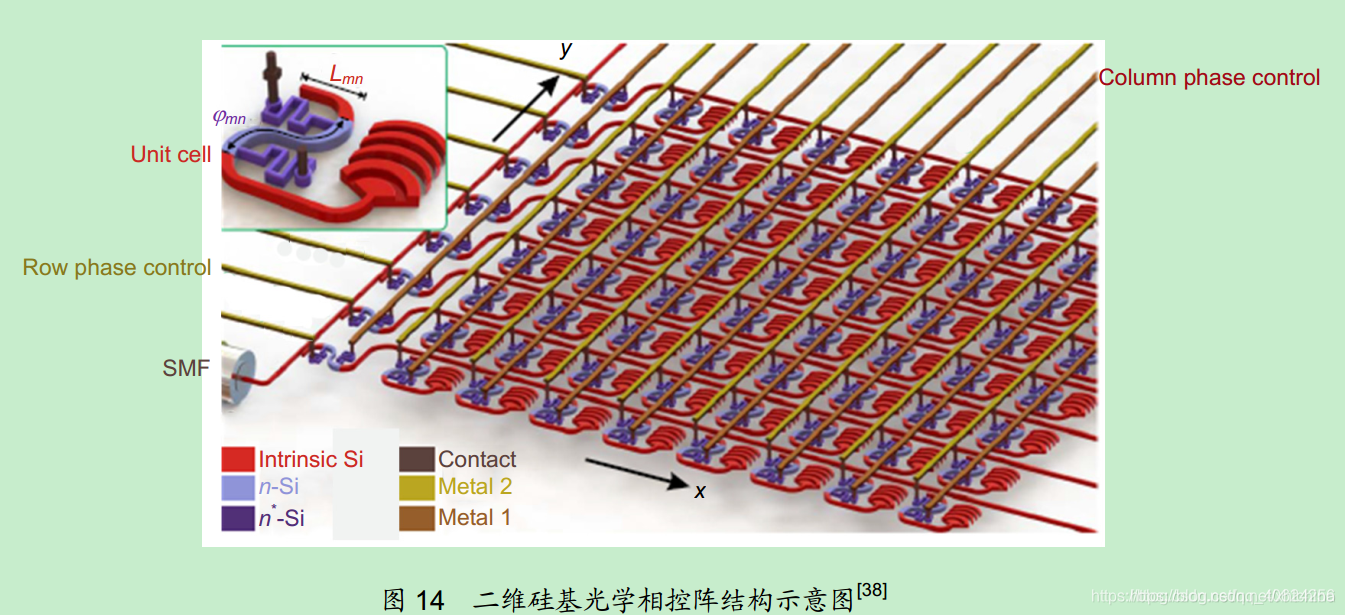
2.3.1. OPA
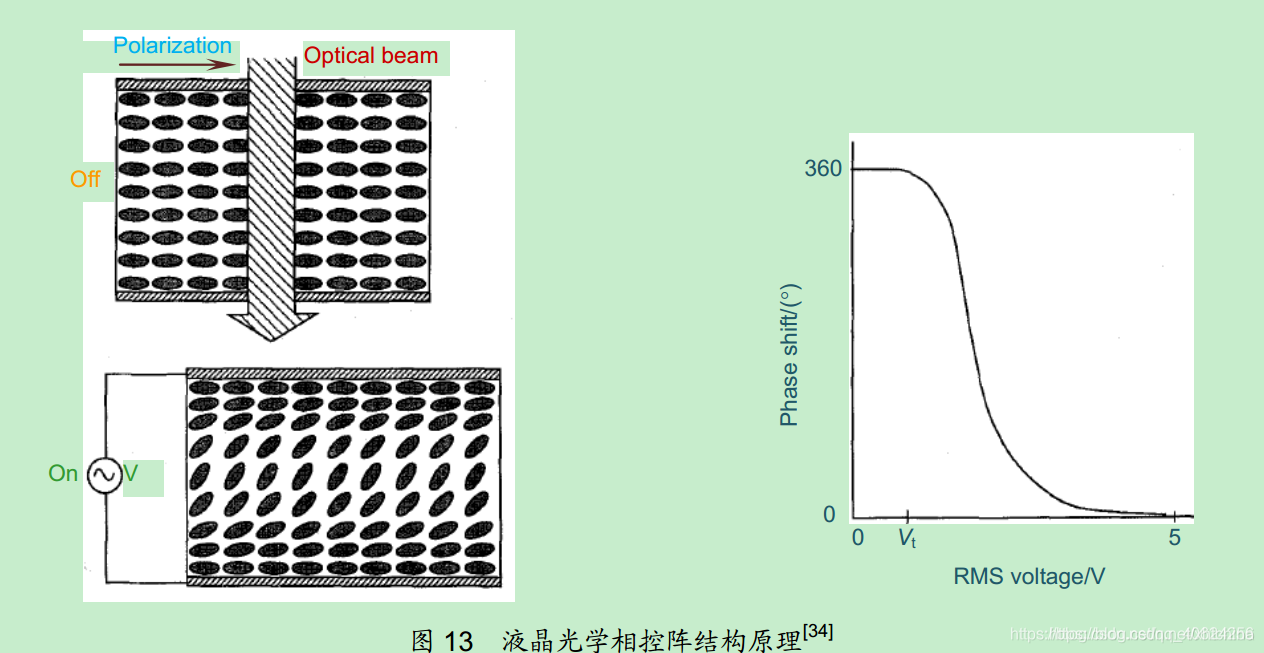
利用光源干涉技术实现光线角度偏转,通过控制阵列中相邻发射光线的相位差实现 3D 空间的扫描,达到与旋转机械式雷达一样的效果,优点是扫描速度快、精度高,但是该技术对材料和工艺的要求都极为苛刻,目前尚处于实验室前期产品,短期内难以实现商业化。
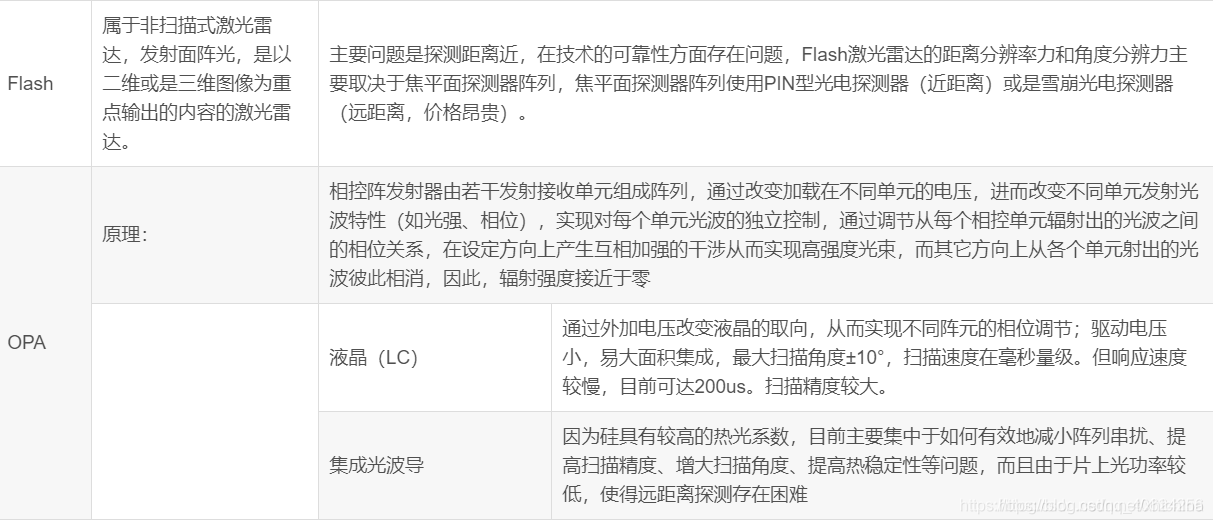
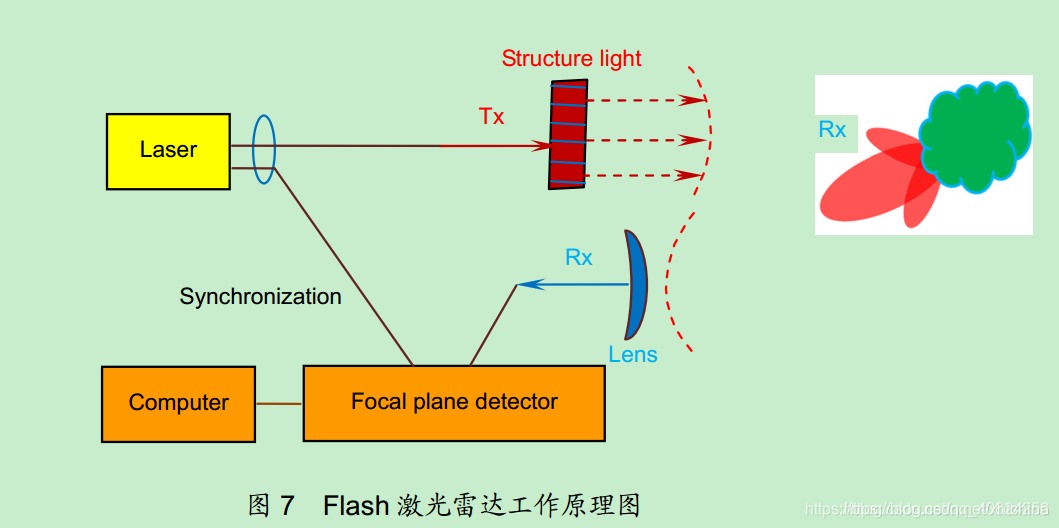
2.3.2. FLASH
类似一个照相机,短时间内一次性发射光束,是目前纯固态激光雷达最主流的技术方案。
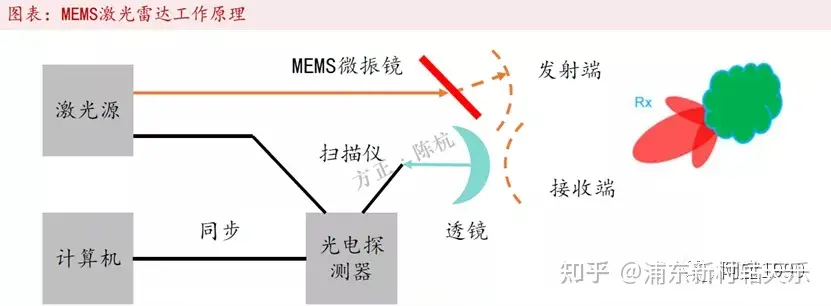
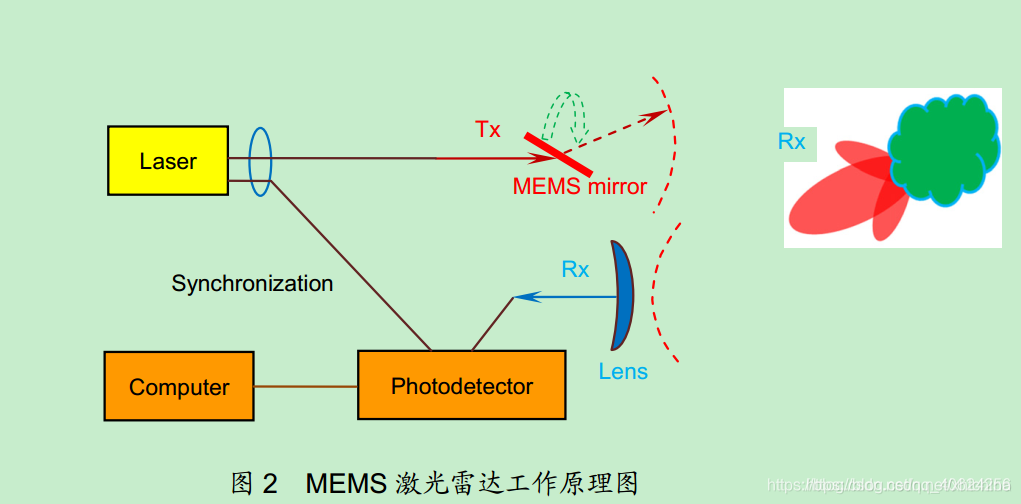
3. 固态激光雷达的原理
就激光雷达技术链而言, 激光雷达包括ToF 芯片和数模转换芯片组、高带宽近红外光源(发光二极管或者激光器)、用于光束整形的光学器件、透镜(需经过优化,且适合近红外光透)以及用于与 ToF 芯片进行数据传递并与主处理器通信的处理器。其中, ToF 芯片和数模转换芯片组是核心部分。未来激光雷达技术将向固态化、小型化的方向发展, 但目前机械式激光雷达仍是主流。激光雷达在人工智能领域扫描速度应该在百kHz以上,扫描角度几十度以上,其内部的光束扫描器和探测系统的实验方式是重点研究对象。
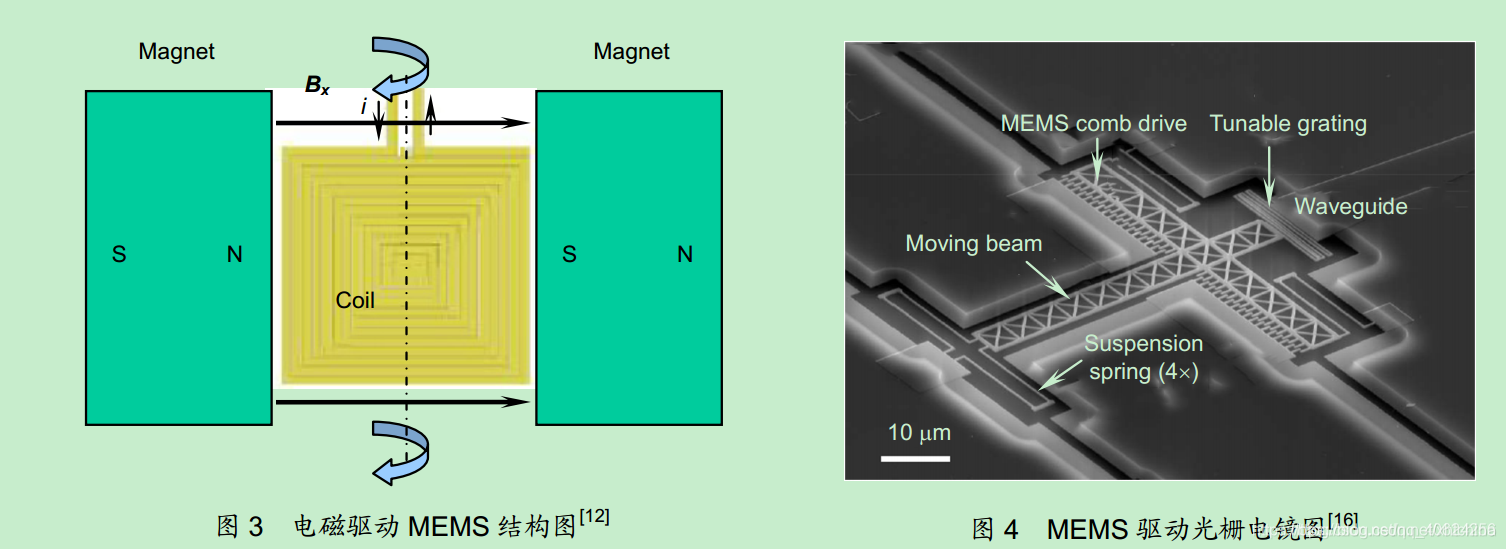
固态激光雷达的实现方式主要有MEMS(微机电系统),OPA(光学相控阵),Flash(闪光)三种;


















 1883
1883

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









