








纯手工搭建的机器人,因此外观并不美。
基于ROS(indigo)以及Arduino等搭建软硬件平台,包括语音、视觉、激光、码盘等传感器设备。
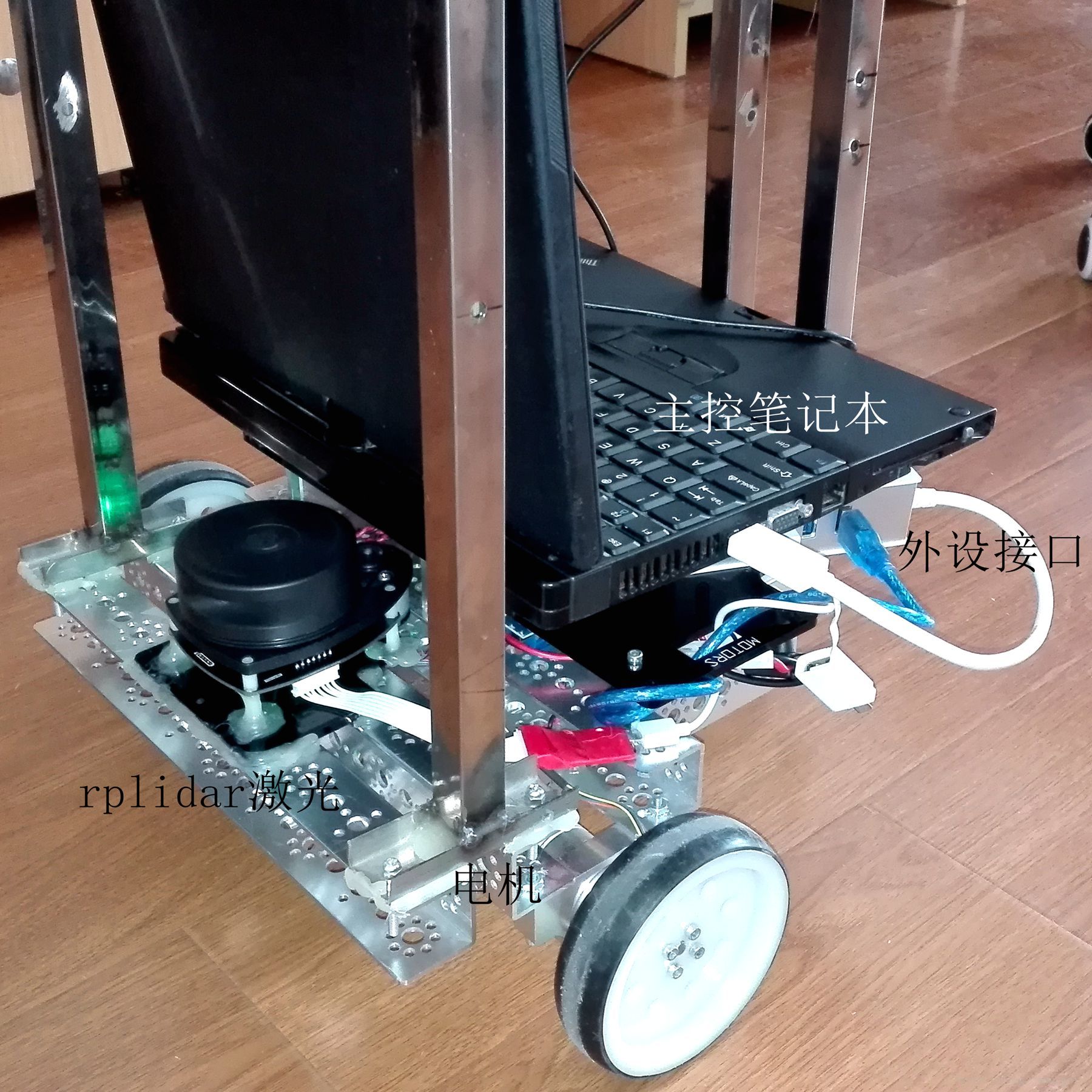
整体如下图所示:

底盘特写:

语音输入:

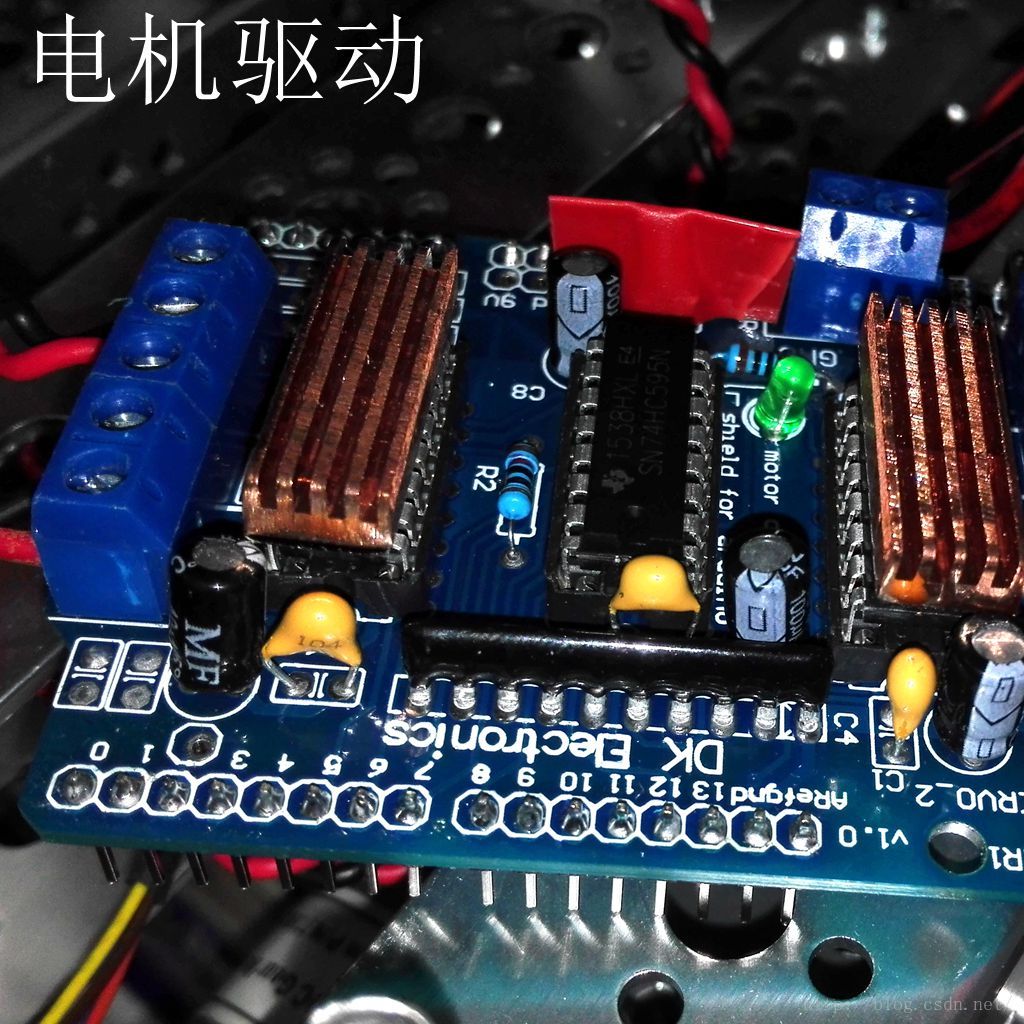
Arduino模块:

机器人主控:

各子功能测试,见之前博客内容。
子功能测试完成后,进行第一次功能组合测试,具体实验录像可见视频。
http://v.youku.com/v_show/id_XMTQxOTczMDY0MA

纯手工搭建的机器人,因此外观并不美。
基于ROS(indigo)以及Arduino等搭建软硬件平台,包括语音、视觉、激光、码盘等传感器设备。
整体如下图所示:
底盘特写:
语音输入:
Arduino模块:
机器人主控:
各子功能测试,见之前博客内容。
子功能测试完成后,进行第一次功能组合测试,具体实验录像可见视频。
http://v.youku.com/v_show/id_XMTQxOTczMDY0MA
 3122
1万+
3122
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























