







 文章探讨了激光雷达在建图过程中Z轴方向出现偏差的原因,主要是由于竖直方向分辨率低、点云精度差以及误差累积。提出了解决策略,包括增加地面约束、利用IMU信息、实施回环检测以及借助GNSS或Landmarks的外部定位信息,同时强调了避免误差累积和处理特殊情况如上下坡场景的重要性。
文章探讨了激光雷达在建图过程中Z轴方向出现偏差的原因,主要是由于竖直方向分辨率低、点云精度差以及误差累积。提出了解决策略,包括增加地面约束、利用IMU信息、实施回环检测以及借助GNSS或Landmarks的外部定位信息,同时强调了避免误差累积和处理特殊情况如上下坡场景的重要性。
现象:
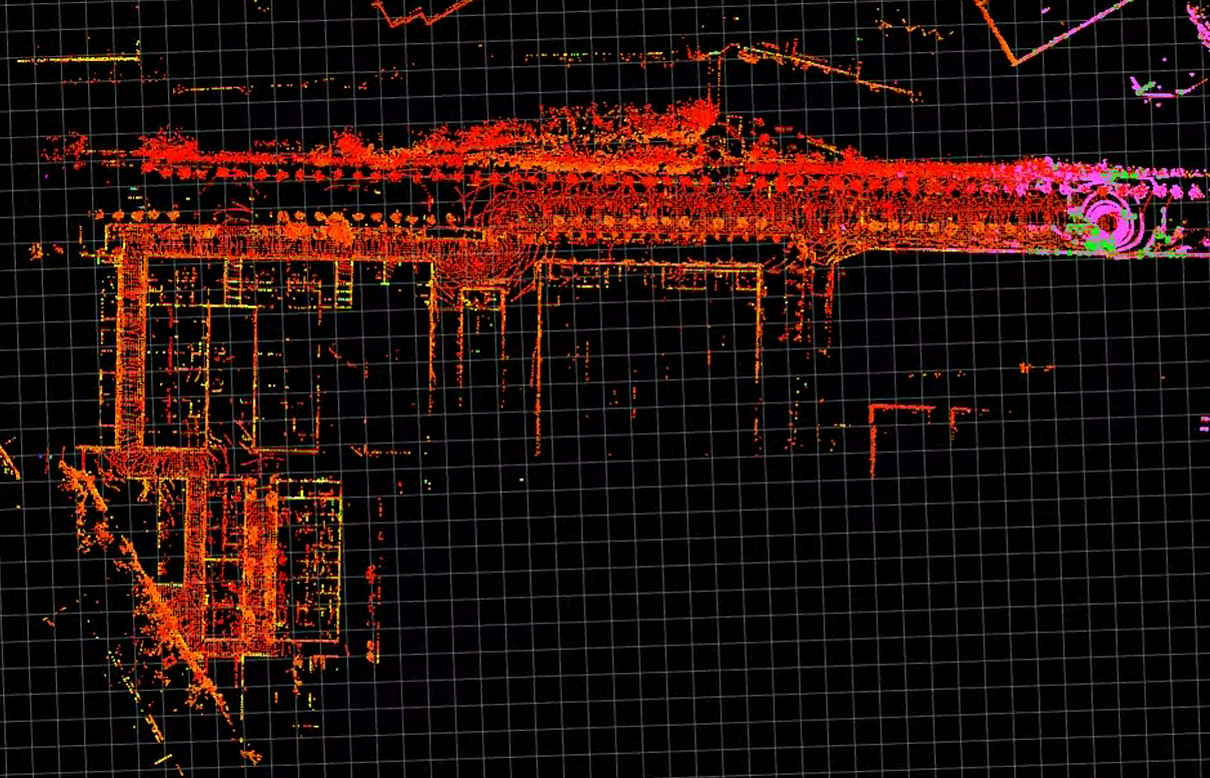
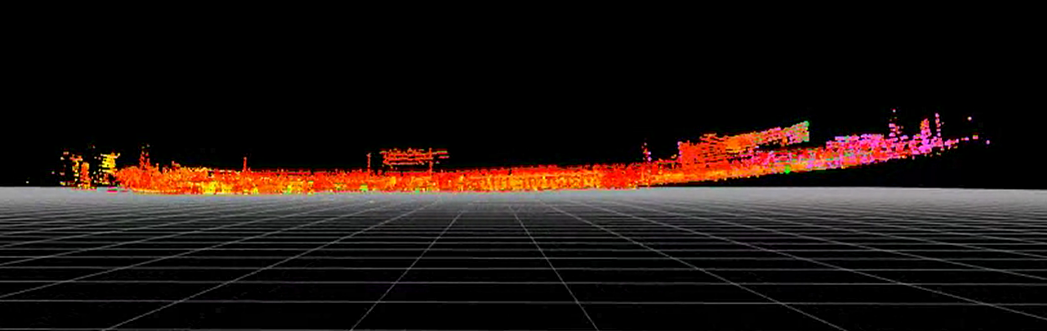
下面两张图分别是建图过程中的俯视图和正视图。从俯视图看建图基本是正确的,但是从正视图来看,在前进了四五百米之后Z轴方向产生了比较大的偏差。
原因分析:
Z轴方向分辨率低(以16线激光雷达为例,水平方向分辨率为0.2°,但是竖直方向分辨率为2°),观测信息(地面点云及特征)较少。
激光雷达打到地面上的点入射角通常较大(想象激光雷达打到墙上与打到地面的入射角差异),点云精度差且不稳定。
点云配准过程中的误差累积问题。
lidar和IMU之间的外参及IMU本身误差及同样会造成影响。
解决思路:
增加地面约束。在hdl-graph-slam和livox-mapping中均有用到地面约束,在优化时考虑地面约束残差。不同SLAM方案对比可参考开源3D激光(视觉)SLAM算法汇总(持续更新)。地面约束也有不同思路:一种思路是,在已知应用场景为平面场景时,可以第一帧地面作为基准,后面的所有地面都与第一帧地面添加约束边;另一种思路是当前帧与local_map分别提取地面,来做地面约束。当然,地面约束本质上也是帧间约束,仍存在累计误差,为了避免添加地面约束对上下坡场景的不友好,可以对地面约束进行打分计算,只要地面特征足够“明显“和地面约束足够可靠,才在对应的关键帧处添加地面约束的残差块。
利用IMU提供roll和pitch观测信息,但是要避免引入较差的IMU重力约束。
回环检测。场景不是特别大的话还是十分有效的,回环检测方案可参考开源3D激光雷达闭环检测方法。
利用GNSS或Landmarks等外部的绝对位置信息。但是要避免因为使用垃圾、离群点位置信息而带来更严重的误差。
参考:


















 1168
1168

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









