









 本文讲述了如何在使用ROS进行导航时,处理生成的gridMap.pgm和gridMap.yaml文件,特别关注地图的坐标系原点设置,以及yaml文件中origin参数对图像左下角在地图坐标位置的表示。
本文讲述了如何在使用ROS进行导航时,处理生成的gridMap.pgm和gridMap.yaml文件,特别关注地图的坐标系原点设置,以及yaml文件中origin参数对图像左下角在地图坐标位置的表示。
背景
利用ros进行导航时,生成一张栅格地图,包含gridMap.pgm和gridMap.yaml。现在想要将栅格地图及轨迹在其他应用上显示,需要确定地图的坐标系原点。
gridMap.yaml格式
image: gridMap.pgm #文件名
resolution: 0.20000 #地图分辨率 单位:米/像素
origin: [-129.999994, -114.000002, 0.000000] #图像左下角在地图坐标下的坐标
negate: 0 #是否应该颠倒 白:自由/黑:占用
occupied_thresh: 0.65 #占用概率大于此阈值的像素被认为已完全占用
free_thresh: 0.196 #用率小于此阈值的像素被认为是完全空闲的
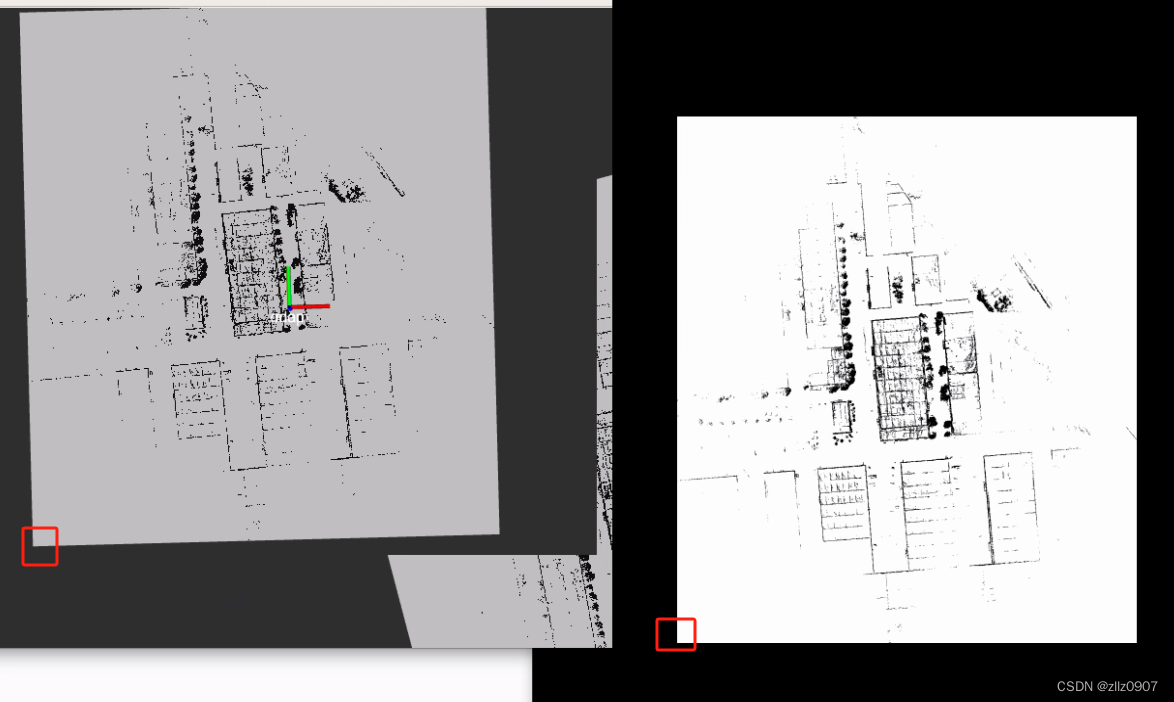
原点(坐标系)确定
如下图所示,yaml文件中的origin代表的是图像左下角在地图坐标下的坐标,因此可在pgm图片中画出坐标系位置,图中红色为x轴,绿色为y轴。

















 1019
1019

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









