









在以前的博客中,我分享了WIN7下ardupilot源码的编译,
下面分享一下在Ubuntu下pixhawk(Firmware)源码编译:
我使用的是虚拟机下UBUNTU14.04,方便在各个系统下的调试开发。
STEP1:
sudo add-apt-repository ppa:george-edison55/cmake-3.x -y
STEP2:
sudo apt-get update
………………………………….
STEP3:
sudo apt-get install python-argparse git-core wget zip python-empy qtcreator cmake build-essential -y
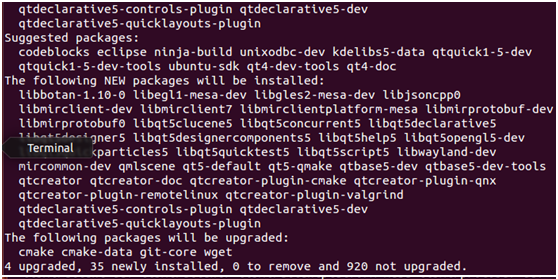
………………………………..

STEP4:
sudo apt-get remove modemmanager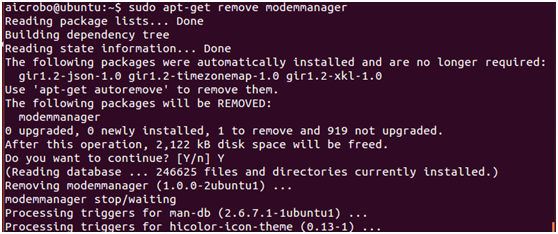
STEP5:
sudo add-apt-repository ppa:terry.guo/gcc-arm-embedded -y
STEP6:
sudo apt-get update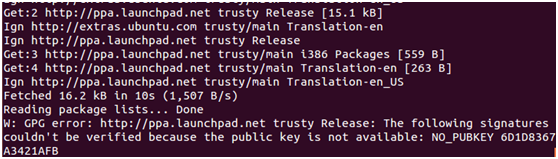
貌似有BUG呀。。。。但不会不会影响后边的过程。。
STEP7:
sudo apt-get install python-serial openocd flex bison libncurses5-dev autoconf texinfo build-essential libftdi-dev libtool zlib1g-dev genromfs python-empy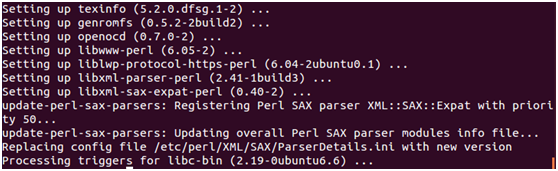
STEP8:
sudo apt-get install gcc-arm-none-eabi -y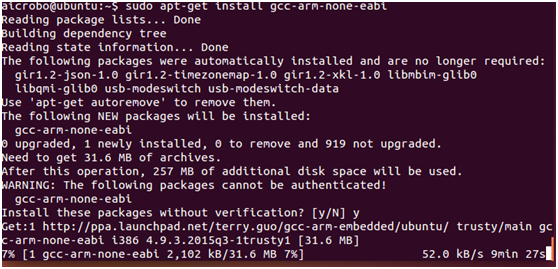
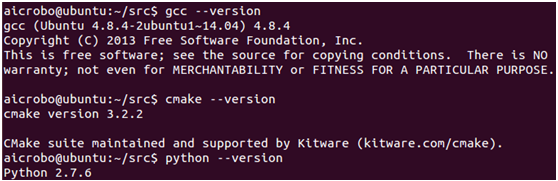
最终查看安装情况:
STEP9:
sudo usermod -a -G dialout $USER关闭虚拟机,重启Ubuntu,使更改生效。。。
上面步骤是编译环境的搭建!
下面是源码获取及编译:
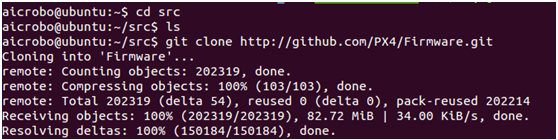
STEP10:
mkdir src
cd src
git clone https://github.com/PX4/Firmware.git
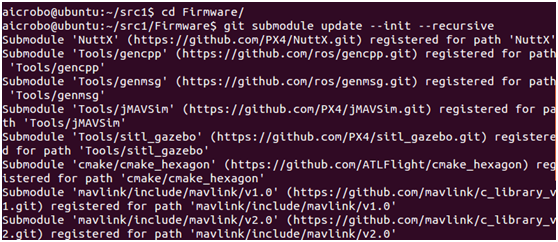
STEP11:
cd Firmware
git submodule update --init --recursive
………..
STEP12:
make px4fmu-v2_default
出现:
可能会出问题。。。。。
但是:
显示正在编译,让我们拭目以待吧。。。。。
最后:
成功了。。。。。。。。。
编译成功文件就是:build_px4fmu-v2_default
下面是烧录到pixhawk:
STEP13:
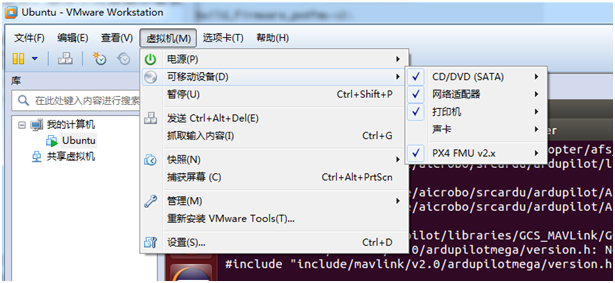
将pixhawk连接虚拟机:
Pixelhawk 通过USB连接PC,在选项 虚拟机->可移动设备->将px4连接至虚拟机。
STEP14:
make px4fmu-v2_default upload
下载100%时,出现几行英文时,发现卡住了,只需要将USB拔掉重插,即可解决,
这时即烧录成功。。。。。















 2402
2402

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









