







 这篇博客介绍了ROS的核心概念,包括节点(Node)、节点管理器(ROS Master)、话题(Topic)、消息(Message)、服务(Servic)和参数(Parameter)。详细阐述了ROS的分布式架构,以及通讯机制如异步通信的话题和同步通信的服务。还讲解了ROS的命令行工具,如roscore、rosrun、rqt_graph等,并演示了如何创建和管理ROS的工作空间与功能包。最后,通过海龟仿真实例展示了ROS的实际应用。
这篇博客介绍了ROS的核心概念,包括节点(Node)、节点管理器(ROS Master)、话题(Topic)、消息(Message)、服务(Servic)和参数(Parameter)。详细阐述了ROS的分布式架构,以及通讯机制如异步通信的话题和同步通信的服务。还讲解了ROS的命令行工具,如roscore、rosrun、rqt_graph等,并演示了如何创建和管理ROS的工作空间与功能包。最后,通过海龟仿真实例展示了ROS的实际应用。
速刷古月居ROS21讲概念全过程
- 标题 : 速刷古月居21讲概念全过程
- 起源: -
- 更新时间如下 (如下)
- 更新次数 : 7
- 最近更新时间 :
- 更新内容:
- 下次更新:
ROS的概念:对应第七讲
通讯机制
- 松耦合分布式软件框架
- Node :每个node就是一个节点,每个节点就是机器人系统中完成具体功能(图像识别 传感器驱动)一个进程
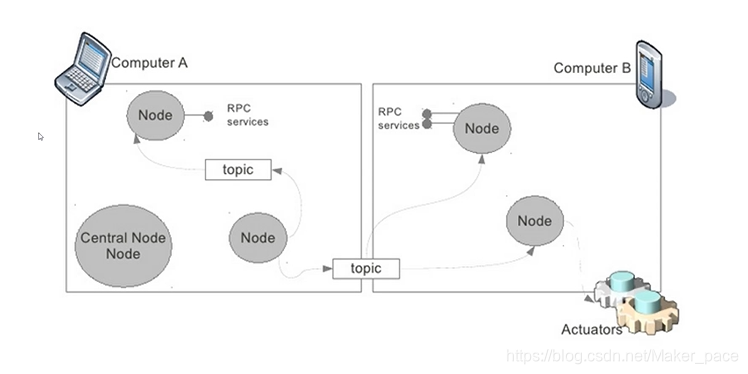
节点 (Node)-- 执行单元
(相当于系统中的一个进程,能够独立运行的一个可执行文件 相当于windows的一个exe文件 )
- 节点: 执行具体任务的进程 、独立运行的可执行文件
- 节点 当中位置不是固定的
- 节点在系统的名称是唯一的
- 节点之间不是孤立的
- 节点之间编程语言不是固定的
(是为了适应不同的功能 ,比如python 做图像处理 ,c/c++ 适合做底层驱动 ) - 节点可以使用分布式运行到不同的主机上
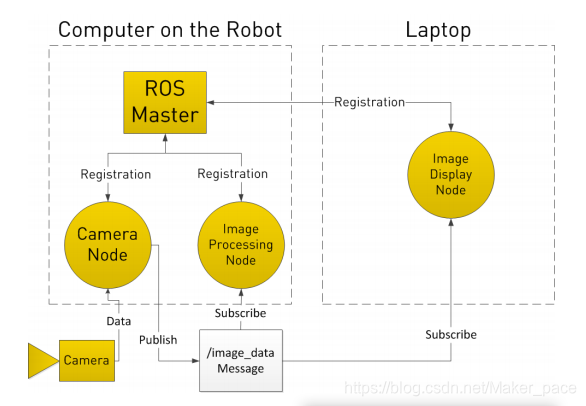
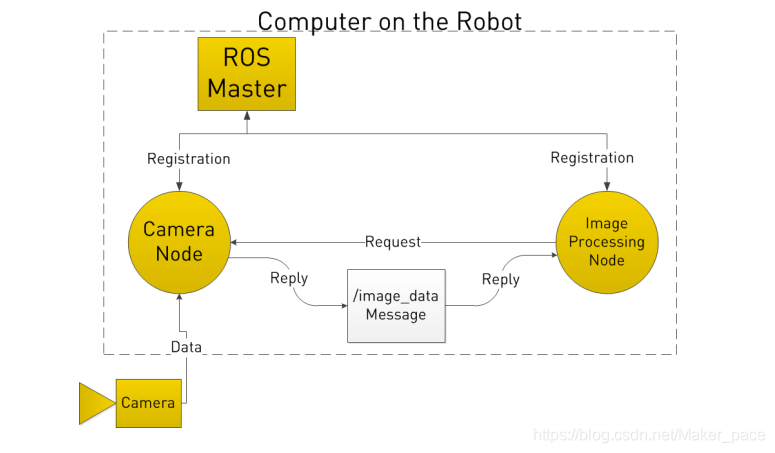
节点管理器(ROS Master)
(ROS当中1)
-
为节点提供命名和注册服务
-
跟踪和记录话题 / 服务通信 ,辅助节点相互查找 建立连接
-
-
提供参数服务器 ,以及节点使用此服务存储和检索运行的参数
话题和消息
(话题和消息 就是节点的两种传输方式 )
- 话题好比发邮件 消息好比打电话
话题(Topic) – 异步通信机制
- 节点间用来传输数据的重要总线
- 使用发布 / 订阅 模型,数据由发布者传输到订阅者,同一个话题的订阅者或发布者可以不唯一
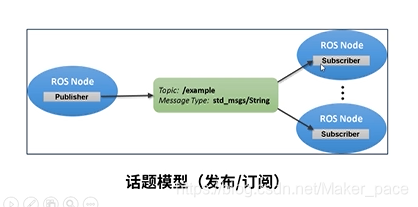
消息(Message) – 话题模型
- 具有一定类型和数据结构 ,包括ROS提供的标准类型 和用户自定义类型
- 使用编程语言无关的.msg文件定义,编译过程中生成的代码文件
- 可以自定义接口满足需求
服务(Servic)— 同步通信机制
- 带有反馈机制
- 使用客户端/服务器(C/S)模型,客户端发送请求数据,服务器完成处理返回应答数据
- 使用编程语言无关的.src 文件定义请求和应答数据结构,编译过程中生成对应的代码文件
- 服务请求一次 满足内容连接

(服务的应用场景 好比摄像头 传输图像 需要 调整摄像头拍摄远程画面,控制摄像头对焦,就是需要调整摄像头) 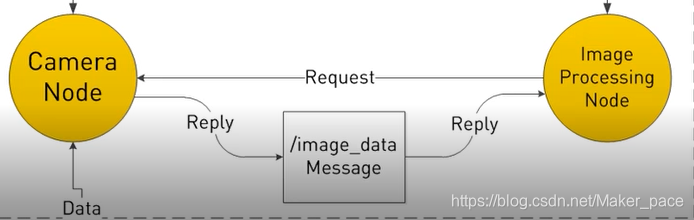
话题 和 服务的区别

参数(Parameter)-- 全局共享字典
- 可通过网络访问的共享 、多变量字典
- 节点使用此服务来存储和检索运行时的参数
- 适合存储静态、非二进制的配置参数 、不适合存储动态配置的数据
( 所有节点 Talke and Listener 都可以给节点赋值 ROS 通信机制就是SPC,从图可以看见,listener必须重新从ROS Master 获取值 才能从Talker获取变化 ,故此ROS( 适合存储静态、非二进制的配置参数 、不适合存储动态配置的数据))
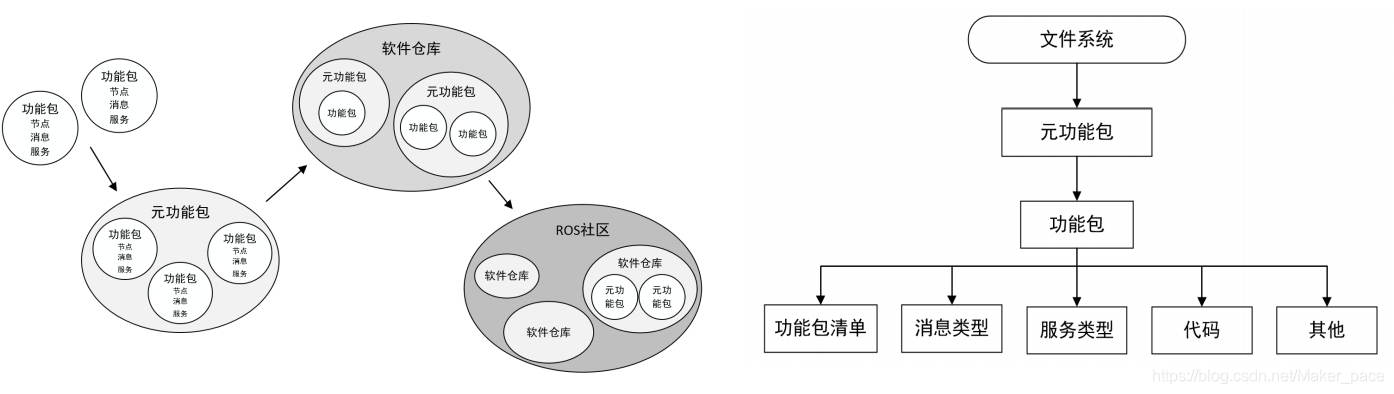
文件系统:
功能包(Package)
- ROS软件中的基本单元,包含节点源码,配置文件,数据定义等
- 功能包 包括(节点 消息 服务)
功能包的清单 (Package manifes)
- 记录功能包的基本信息 ,包含作者基本信息、许可信息、依赖选项、编译标志等
元功能包(MetaPackages)
- 组织多个同一目的功能包
软件仓库
ROS 社区
ROS的概念:对应第八讲
ROS命令行总览:
| ROS shell命令 | |||
|---|---|---|---|
| 命令 | 重要度 | 命令释义 | 详细说明 |
| roscd | 👍👍👍👍 | ros+cd | 移动到指定的ros功能包目录 |
| rosls | 👍👍 | ros+ls(list files) | 显示功能包的文件和目录 |
| rosed | 👍👍 | ros+ed (editor) | 编辑ROS功能包的文件 |
| roscp | 👍👍 | ros+cp (copies files) | 添加目录至目录索引 |
| rosd | 👍 | ros+ deirectory | 添加ROS目录索引中的目录 |
| ROS 执行命令: | |||
| roscore | 👍👍👍👍 | ros+core | master(ROS名称服务)+rosout(日志记录)+parameter server(参数管理) |
| rosrun | 👍👍👍👍 | ros+run | 运行节点 |
| roslaunch | 👍👍👍👍 | ros+launch | 运行多个节点及设置运行选项 |
| rosclean | 👍👍👍 | ros+clean | 检查或删除ROS日志文件 |
| ROS信息命令: | |||
| rostopic | 👍👍👍👍 | ros+topic | 确认ROS话题信息 |
| rosservice | 👍👍👍👍 | ros+service | 确认ROS命令行信息 |
| rosnode | 👍👍👍👍 | ros+node | 确认ROS节点信息 |
| rosparam | 👍👍👍&#x |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 586
586

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











