







Autoware感知瞎学笔记(一)lidar_kf_contour_track
目录
想要学习L4的无人驾驶,入门教科书autoware堪称经典,这里分享个人的学习笔记以及个人理解(如果错了,请轻点指正哈)
代码分析:
一、雷达目标Kalman滤波器
三维激光雷达数据从传感器出来后,经过传统的聚类+高精地图object filter,或者learning-based的方法之后,得到一个目标列表,此目标列表含有二维位置信息和角度信息,没有速度信息;同时基于每一帧的检测方法,可能会出现“目标消失”的问题,因此需要滤波器来track住这些目标,下面看Autoware是怎么处理这个问题的。
代码位置:autoware/core_perception/lidar_kf_contour_track
1. lidar_kf_contour_track.cpp
拿到ros的package,直接打开CMakeList文件
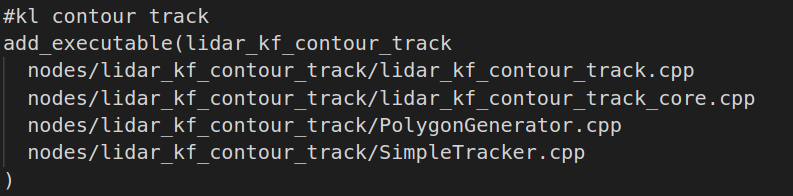
可以看到构成lidar_kf_contour_track这个节点的文件,有四个。我们直奔主题打开每个cpp,可以看到lidar_kf_contour_track.cpp是这个节点的入口,在main函数内实例化在ContourTrackerNS命名空间内的一个类ContourTracker,调用MainLoop() 方法。因此打开定义ContourTracker类的头文件:lidar_kf_contour_tracker_core.h

2. lidar_kf_contour_tracker_core.h
我们在这里首先分析这个入口类ContourTracker的头文件,并且从类内变量逐行分析
 1. std::vector< PlannerHNS::DetectedObject > m_OriginalClusters;
1. std::vector< PlannerHNS::DetectedObject > m_OriginalClusters;
打开DetectedObject这一类型定义:该文件存放在common/op_planner/RoadNetwork.h中

里面存放这描述检测目标的一些基本属性,标签,类别,尺寸,速度,角度,等等,,。同时在构造函数的时候,初始化这些变量
2.autoware_msgs::DetectedObjectArray m_OutPutResults;
记录发布数据的ros消息,消息格式如下:
std_msgs/Header header
DetectedObject[] objects
DetectedObject消息格式:
可以看到是将3D BoundingBox和目标在2D图像中的大小都汇总在此消息数据里,便于目标消息的复用。
std_msgs/Header header
uint32 id
string label
float32 score #Score as defined by the detection, Optional
std_msgs/ColorRGBA color # Define this object specific color
bool valid # Defines if this object is valid, or invalid as defined by the filtering
################ 3D BB
string space_frame #3D Space coordinate frame of the object, required if pose and dimensions are defines
geometry_msgs/Pose pose
geometry_msgs/Vector3 dimensions
geometry_msgs/Vector3 variance
geometry_msgs/Twist velocity
geometry_msgs/Twist acceleration
sensor_msgs/PointCloud2 pointcloud
geometry_msgs/PolygonStamped convex_hull
autoware_msgs/LaneArray candidate_trajectories
bool pose_reliable
bool velocity_reliable
bool acceleration_reliable
############### 2D Rect
string image_frame # Image coordinate Frame, Required if x,y,w,h defined
int32 x # X coord in image space(pixel) of the initial point of the Rect
int32 y # Y coord in image space(pixel) of the initial point of the Rect
int32 width # Width of the Rect in pixels
int32 height # Height of the Rect in pixels
float32 angle # Angle [0 to 2*PI), allow rotated rects
sensor_msgs/Image roi_image
############### Indicator information
uint8 indicator_state # INDICATOR_LEFT = 0, INDICATOR_RIGHT = 1, INDICATOR_BOTH = 2, INDICATOR_NONE = 3
############### Behavior State of the Detected Object
uint8 behavior_state # FORWARD_STATE = 0, STOPPING_STATE = 1, BRANCH_LEFT_STATE = 2, BRANCH_RIGHT_STATE = 3, YIELDING_STATE = 4, ACCELERATING_STATE = 5, SLOWDOWN_STATE = 6
#
string[] user_defined_info
3.bool bNewClusters;
bool类型变量, 表达是否是新的cluster
4.PlannerHNS::WayPoint m_CurrentPos; 使用WayPoint类型来表示当前的位姿
其中waypoint记录了当前所属的lane ID,id,Left ID, Right ID,前面的和后面的waypoints。这里因为作者还没有阅读整个autoware的代码,所以在这大胆猜测一下,这里记录的是当前lane内,在此waypoint的前面和后面所有的waypoints,和carla里面导航的方式是一样的。同时记录了关于occupancy grid map 的参数。关于其他的参数含义,我们在后续的文章中再去解读。
 5.bool bNewCurrentPos;
5.bool bNewCurrentPos;
这里表示的应该是是否收到了新的位姿信息,表示位置更新
6.PerceptionParams m_Params;
看到变量的名字感觉是感知相关的参数,但是看内容其实这里的参数感觉是滤波相关的参数,车辆的size,检测半径,最大的objectsize,最小的objectsize,目标boundingbox相关参数,其他的应该是滤波器的相关设置
 7.SimpleTracker m_ObstacleTracking;
7.SimpleTracker m_ObstacleTracking;
这里便是SimpleTracker实际的调用了,这个类其实是将kF又封装了一层,用于管理检测到的对象。关于SimpleTracker我们在第二节分析。
 8.这部分的成员变量是用来表示可视化的
8.这部分的成员变量是用来表示可视化的

9. std::vector < std::string > m_LogData; 记录log数据
10.PlannerHNS::MAP_SOURCE_TYPE m_MapType; 地图的类型
11.std::string m_MapPath;存放地图的路径
12.PlannerHNS::RoadNetwork m_Map;
这里存放的是便是autoware的高精地图,vector_map,我们打开RoadNetWork的类定义看下:

可以看到autoware使用vector来存放同一类型的道路元素,关于底层基类比如RoadSegament,TrafficLight,StopLine的分析,会在后续的文章中讲解。同时我们也会去学习autoware中的高精地图是怎样做的,它是怎么提供我们所需要的信息的。
13.bool bMap;
14.double m_MapFilterDistance;
15.std::vector < PlannerHNS::Lane*> m_ClosestLanesList;
在这里我们打开PlannerHNS::Lane这个数据类型:

这里分别有如下属性:
id,roadId当前lane所在road的id,areaId,fromAreaId,toAreaId,
fromIds表示当前lane的父lane Id,
toIds表示当前lane的子lane Id,
num表示一个road内有多少条lane
speed,dir,type,
points这个车道内所有的路点,trafficlights 交通灯,stoplines停止线,
fromLanes, toLanes 则是刚刚ID对应的道路集合
pLeftLane, pRightLane 这是左右两边的道路
pRoad则是当前lane所在的road
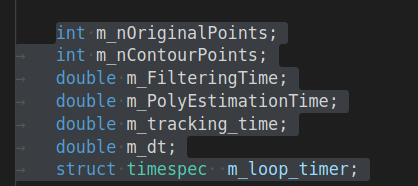
16.这里是类内关于kf滤波器的一些参数了
17. ros层变量以及回调函数声明
 18.最后公有变量里面都是关于map的,通过ros topic的方式接收地图各种元素消息。
18.最后公有变量里面都是关于map的,通过ros topic的方式接收地图各种元素消息。

3. lidar_kf_contour_tracker_core.cpp
3.1 构造函数ContourTracker()

-
第一部分初始化类内成员变量

-
ReadNodeParams():通过ros参数服务器拿到参数

-
ReadCommonParams():这里bEnableLaneChange参数需要记住,还有上面的m_MapFilterDistance 参数,下面要考。

-
设置并且初始化kf滤波器

最后的初始化部分,会在第二节SimpleTracker部分分析,根据函数名字可以猜到,这是初始化滤波器。 -
订阅和发布topic
 这里让人注意的应该是发布ttc_direct_path这个topic,单学习过感知但是没有无人驾驶知识的,应该不知道ttc这个知识点,ttc的全称是time to crash,就是剩余到达要碰撞的时间。因此读到这里,感觉下面是要计算出一个到达前面目标的路径,然后可视化出来。
这里让人注意的应该是发布ttc_direct_path这个topic,单学习过感知但是没有无人驾驶知识的,应该不知道ttc这个知识点,ttc的全称是time to crash,就是剩余到达要碰撞的时间。因此读到这里,感觉下面是要计算出一个到达前面目标的路径,然后可视化出来。 -
下面便是关于可视化的一些操作
 打开InitMarkers()函数:
打开InitMarkers()函数:
 其实这里就是通过调用CreateGenMarker的方法生成五种类型的显示Marker,分别用来显示目标的中心,方向,文本标记,外围的polygon,还有track出来的轨迹。打开CreateGenMarker方法:
其实这里就是通过调用CreateGenMarker的方法生成五种类型的显示Marker,分别用来显示目标的中心,方向,文本标记,外围的polygon,还有track出来的轨迹。打开CreateGenMarker方法:
 这里传入相应marker的属性标签,返回对应的marker。
这里传入相应marker的属性标签,返回对应的marker。
因此我们可以得知,类内全局变量m_DetectedPolygonsDummy 和 m_DetectedPolygonsActual 存放的是五种关于目标属性的Marker。
最后调用InitMatchingMarkers() 方法:
 其实这里也是换汤不换药,调用CreateMarker方法生成用于显示匹配关系的Marker,然后类型是LINE_STRIP
其实这里也是换汤不换药,调用CreateMarker方法生成用于显示匹配关系的Marker,然后类型是LINE_STRIP
3.2 析构函数 ~ContourTracker()
 在析构的时候,我们需要在某个位置写入log数据,记录跟踪对象的详细数据
在析构的时候,我们需要在某个位置写入log数据,记录跟踪对象的详细数据
3.3 点云聚类回调函数

- 首先看下消息格式类型:autoware_msgs::CloudClusterArrayConstPtr, 里面存放的是标准的消息头,还有CloudCluster类型的数组

打开CloudCluster消息类型,查看里面的格式:

分别是标准消息头,id,标签,得分,点云消息,估计角度,点云的最小值,最大值,平均值,中心值, 三个尺度量(这里暂时不清楚存放的是什么变量),点云fpfh描述子,boundingbox,描述凸边界的convex_hull,目标转向信息。
3.3.1 ImportCloudClusters函数
- 如果有定位数据 || 使用仿真的方式
调用ImportCloudClusters(msg, m_OtiginalClusters) 方法, 将聚类的数据转到类内全局变量m_OriginalClusters中

先是初始化一些变量,然后是实例化一个PolygonGenrator类,打开PolygonGenrator类定义:
class PolygonGenerator
{
public:
PlannerHNS::GPSPoint m_Centroid;
std::vector<QuarterView> m_Quarters;
std::vector<PlannerHNS::GPSPoint> m_Polygon;
PolygonGenerator(int nQuarters);
virtual ~PolygonGenerator();
std::vector<QuarterView> CreateQuarterViews(const int& nResolution);
std::vector<PlannerHNS::GPSPoint> EstimateClusterPolygon(const pcl::PointCloud<pcl::PointXYZ>& cluster,
const PlannerHNS::GPSPoint& original_centroid, PlannerHNS::GPSPoint& new_centroid, const double& polygon_resolution = 1.0);
};
打开类定义CPP文件PolygonGenerator.cpp,首先看到构造函数部分:
std::vector<QuarterView> PolygonGenerator::CreateQuarterViews(const int& nResolution)
{
std::vector<QuarterView> quarters;
if(nResolution <= 0)
return quarters;
double range = 360.0 / nResolution;
double angle = 0;
for(int i = 0; i < nResolution; i++)
{
QuarterView q(angle, angle+range, i);
quarters.push_back(q);
angle+=range;
}
return quarters;
}
这里面构造函数返回值是:std::vector< QuaterView >,我们就先看下QuarterView类定义:

- 构造函数和Init方法都可以传入参数
- Reset方法重置标志位
- UpdateQuarterView()方法,如果传入的路点的角度超出角度范围限制,则不更新。如果bFirst为真,即第一次更新数据,则直接将点赋值给类内全局变量max_from_center, 如果更新过了那么只有传入点的cost大于类内max_from_center的cost,才覆盖max_from_center。
- GetMaxPoint() 方法,如果没有更新过UpdateQuarterView方法,则返回false,即拿不到最大点。否则取得类内全局变量max_from_center。
这里再回到CreateQuarterViews方法,先定义一个QuarterView类型的vector,如果传入nResolution小于0,则直接返回。将360度分成nResolution等份,实例化nResolution个QuarterView,每个QuarterView平分360度,并存入到quarters,返回。
std::vector<QuarterView> PolygonGenerator::CreateQuarterViews(const int& nResolution)
{
std::vector<QuarterView> quarters;
if(nResolution <= 0)
return quarters;
double range = 360.0 / nResolution;
double angle = 0;
for(int i = 0; i < nResolution; i++)
{
QuarterView q(angle, angle+range, i);
quarters.push_back(q);
angle+=range;
}
return quarters;
}
继续打开PolygonGenerator.cpp分析,下面是主要的一个函数EstimateClusterPolygon:
std::vector<PlannerHNS::GPSPoint> PolygonGenerator::EstimateClusterPolygon(const pcl::PointCloud<pcl::PointXYZ>& cluster, const PlannerHNS::GPSPoint& original_centroid, PlannerHNS::GPSPoint& new_centroid, const double& polygon_resolution)
{
for(unsigned int i=0; i < m_Quarters.size(); i++)
m_Quarters.at(i).ResetQuarterView();
PlannerHNS::WayPoint p;
for(unsigned int i=0; i< cluster.points.size(); i++)
{
p.pos.x = cluster.points.at(i).x;
p.pos.y = cluster.points.at(i).y;
p.pos.z = original_centroid.z;
PlannerHNS::GPSPoint v(p.pos.x - original_centroid.x , p.pos.y - original_centroid.y, 0, 0);
p.cost = pointNorm(v);
p.pos.a = UtilityHNS::UtilityH::FixNegativeAngle(atan2(v.y, v.x))*(180. / M_PI);
for(unsigned int j = 0 ; j < m_Quarters.size(); j++)
{
if(m_Quarters.at(j).UpdateQuarterView(p))
break;
}
}
m_Polygon.clear();
PlannerHNS::WayPoint wp;
for(unsigned int j = 0 ; j < m_Quarters.size(); j++)
{
if(m_Quarters.at(j).GetMaxPoint(wp))
m_Polygon.push_back(wp.pos);
}
// //Fix Resolution:
bool bChange = true;
while (bChange && m_Polygon.size()>1)
{
bChange = false;
PlannerHNS::GPSPoint p1 = m_Polygon.at(m_Polygon.size()-1);
for(unsigned int i=0; i< m_Polygon.size(); i++)
{
PlannerHNS::GPSPoint p2 = m_Polygon.at(i);
double d = hypot(p2.y- p1.y, p2.x - p1.x);
if(d > polygon_resolution)
{
PlannerHNS::GPSPoint center_p = p1;
center_p.x = (p2.x + p1.x)/2.0;
center_p.y = (p2.y + p1.y)/2.0;
m_Polygon.insert(m_Polygon.begin()+i, center_p);
bChange = true;
break;
}
p1 = p2;
}
}
PlannerHNS::GPSPoint sum_p;
for(unsigned int i = 0 ; i< m_Polygon.size(); i++)
{
sum_p.x += m_Polygon.at(i).x;
sum_p.y += m_Polygon.at(i).y;
}
new_centroid = original_centroid;
if(m_Polygon.size() > 0)
{
new_centroid.x = sum_p.x / (double)m_Polygon.size();
new_centroid.y = sum_p.y / (double)m_Polygon.size();
}
return m_Polygon;
}
- 遍历m_Quaters,重置QuarterView
- 遍历聚类之后一簇点云中的所有点,算出每一个点到中心点的距离和相对中心的角度,更新到m_Quarters数据中
- 遍历m_Quaters,得到每一个Quater的最大点,即最外面的边界点,并且传入到m_polygon中
- 当m_polygon中有数据:
- bchange循环开关变量置为false,取出m_polygon中最后一个点
- 遍历m_polygon
- 计算每一个点和最后一个点的距离
- 如果这个距离大于一定的阈值:在m_Polygon中插入一个中间点,退出for循环,继续while循环,直到不满足两点之间的距离大于某个阈值
- 重新计算新的m_polygon所有点的中心值
以上便是PolygonGenrator类的方法,我们重新回到主线程ImportCloudClusters方法中:
- 实例化一个m_Params.nQuaters数量的Polygen
- 使用GetClosestLaneFast方法来快速获取附近的所有车道
- 遍历所有的聚类点云
- 计算出这些点的一些属性
- 通过IsCar方法来判断是否是车辆
- 更新时间
- 调用上述的EsitimateClusterPolygon方法来重新插值计算新的聚类中心
- 继续更新时间,将obj传入到originalCluster中,返回出去
3.3.2 DoOneStep函数
此部分是kf滤波中的方法,会在第二节分析
3.3.3 LogAndSend函数
void ContourTracker::LogAndSend()
{
timespec log_t;
UtilityHNS::UtilityH::GetTickCount(log_t);
std::ostringstream dataLine;
std::ostringstream dataLineToOut;
dataLine << UtilityHNS::UtilityH::GetLongTime(log_t) <<"," << m_dt << "," <<
m_ObstacleTracking.m_DetectedObjects.size() << "," <<
m_OriginalClusters.size() << "," <<
m_ObstacleTracking.m_DetectedObjects.size() - m_OriginalClusters.size() << "," <<
m_nOriginalPoints << "," <<
m_nContourPoints<< "," <<
m_FilteringTime<< "," <<
m_PolyEstimationTime<< "," <<
m_tracking_time<< "," <<
m_tracking_time+m_FilteringTime+m_PolyEstimationTime<< ",";
m_LogData.push_back(dataLine.str());
m_OutPutResults.objects.clear();
autoware_msgs::DetectedObject obj;
for(unsigned int i = 0 ; i <m_ObstacleTracking.m_DetectedObjects.size(); i++)
{
PlannerHNS::ROSHelpers::ConvertFromOpenPlannerDetectedObjectToAutowareDetectedObject(m_ObstacleTracking.m_DetectedObjects.at(i), m_Params.bEnableSimulation, obj);
m_OutPutResults.objects.push_back(obj);
}
m_OutPutResults.header.frame_id = "map";
m_OutPutResults.header.stamp = ros::Time();
pub_AllTrackedObjects.publish(m_OutPutResults);
}
这里面就是简单的记录log数据,然后调用ConvertFromOpenPlannerDetectedObjectToAutowareDetectedObject方法将检测到的目标转换到autoware_msgs::DetectedObject 类型变量,压入到m_OutPutResults变量中,然后通过ros发布出去。
3.3.3 VisualizeLocalTracking函数
void ContourTracker::VisualizeLocalTracking()
{
PlannerHNS::ROSHelpers::ConvertTrackedObjectsMarkers(m_CurrentPos, m_ObstacleTracking.m_DetectedObjects,
m_DetectedPolygonsDummy.at(0),
m_DetectedPolygonsDummy.at(1),
m_DetectedPolygonsDummy.at(2),
m_DetectedPolygonsDummy.at(3),
m_DetectedPolygonsDummy.at(4),
m_DetectedPolygonsActual.at(0),
m_DetectedPolygonsActual.at(1),
m_DetectedPolygonsActual.at(2),
m_DetectedPolygonsActual.at(3),
m_DetectedPolygonsActual.at(4));
PlannerHNS::ROSHelpers::ConvertMatchingMarkers(m_ObstacleTracking.m_MatchList, m_MatchingInfoDummy.at(0), m_MatchingInfoActual.at(0), 0);
m_DetectedPolygonsAllMarkers.markers.clear();
m_DetectedPolygonsAllMarkers.markers.insert(m_DetectedPolygonsAllMarkers.markers.end(), m_DetectedPolygonsActual.at(0).markers.begin(), m_DetectedPolygonsActual.at(0).markers.end());
m_DetectedPolygonsAllMarkers.markers.insert(m_DetectedPolygonsAllMarkers.markers.end(), m_DetectedPolygonsActual.at(1).markers.begin(), m_DetectedPolygonsActual.at(1).markers.end());
m_DetectedPolygonsAllMarkers.markers.insert(m_DetectedPolygonsAllMarkers.markers.end(), m_DetectedPolygonsActual.at(2).markers.begin(), m_DetectedPolygonsActual.at(2).markers.end());
m_DetectedPolygonsAllMarkers.markers.insert(m_DetectedPolygonsAllMarkers.markers.end(), m_DetectedPolygonsActual.at(3).markers.begin(), m_DetectedPolygonsActual.at(3).markers.end());
m_DetectedPolygonsAllMarkers.markers.insert(m_DetectedPolygonsAllMarkers.markers.end(), m_DetectedPolygonsActual.at(4).markers.begin(), m_DetectedPolygonsActual.at(4).markers.end());
visualization_msgs::MarkerArray all_circles;
for(unsigned int i = 0; i < m_ObstacleTracking.m_InterestRegions.size(); i++)
{
visualization_msgs::Marker circle_mkrs;
PlannerHNS::ROSHelpers::CreateCircleMarker(m_CurrentPos, m_ObstacleTracking.m_InterestRegions.at(i)->radius, i ,circle_mkrs );
all_circles.markers.push_back(circle_mkrs);
}
m_DetectedPolygonsAllMarkers.markers.insert(m_DetectedPolygonsAllMarkers.markers.end(), all_circles.markers.begin(), all_circles.markers.end());
m_DetectedPolygonsAllMarkers.markers.insert(m_DetectedPolygonsAllMarkers.markers.end(), m_MatchingInfoActual.at(0).markers.begin(), m_MatchingInfoActual.at(0).markers.end());
pub_DetectedPolygonsRviz.publish(m_DetectedPolygonsAllMarkers);
jsk_recognition_msgs::BoundingBoxArray boxes_array;
boxes_array.header.frame_id = "map";
boxes_array.header.stamp = ros::Time();
for(unsigned int i = 0 ; i < m_ObstacleTracking.m_DetectedObjects.size(); i++)
{
jsk_recognition_msgs::BoundingBox box;
box.header.frame_id = "map";
box.header.stamp = ros::Time().now();
box.pose.position.x = m_ObstacleTracking.m_DetectedObjects.at(i).center.pos.x;
box.pose.position.y = m_ObstacleTracking.m_DetectedObjects.at(i).center.pos.y;
box.pose.position.z = m_ObstacleTracking.m_DetectedObjects.at(i).center.pos.z;
box.value = 0.9;
box.pose.orientation = tf::createQuaternionMsgFromRollPitchYaw(0, 0, m_ObstacleTracking.m_DetectedObjects.at(i).center.pos.a);
box.dimensions.x = m_ObstacleTracking.m_DetectedObjects.at(i).l;
box.dimensions.y = m_ObstacleTracking.m_DetectedObjects.at(i).w;
box.dimensions.z = m_ObstacleTracking.m_DetectedObjects.at(i).h;
boxes_array.boxes.push_back(box);
}
pub_TrackedObstaclesRviz.publish(boxes_array);
}
这里是可视化的方法,将数据传入到对应的变量里,通过ros发布出去
3.3.4 CalculateTTC函数
void ContourTracker::CalculateTTC(const std::vector<PlannerHNS::DetectedObject>& objs, const PlannerHNS::WayPoint& currState, PlannerHNS::RoadNetwork& map)
{
std::vector<std::vector<PlannerHNS::WayPoint> > paths;
GetFrontTrajectories(m_ClosestLanesList, currState, m_Params.DetectionRadius, paths);
double min_d = DBL_MAX;
int closest_obj_id = -1;
int closest_path_id = -1;
int i_start = -1;
int i_end = -1;
for(unsigned int i_obj = 0; i_obj < objs.size(); i_obj++)
{
for(unsigned int i =0 ; i < paths.size(); i++)
{
PlannerHNS::RelativeInfo obj_info, car_info;
PlannerHNS::PlanningHelpers::GetRelativeInfoLimited(paths.at(i), objs.at(i_obj).center , obj_info);
if(!obj_info.bAfter && !obj_info.bBefore && fabs(obj_info.perp_distance) < m_MapFilterDistance)
{
PlannerHNS::PlanningHelpers::GetRelativeInfoLimited(paths.at(i), currState , car_info);
double longitudinalDist = PlannerHNS::PlanningHelpers::GetExactDistanceOnTrajectory(paths.at(i), car_info, obj_info);
if(longitudinalDist < min_d)
{
min_d = longitudinalDist;
closest_obj_id = i_obj;
closest_path_id = i;
i_start = car_info.iFront;
i_end = obj_info.iBack;
}
}
}
}
std::vector<PlannerHNS::WayPoint> direct_paths;
if(closest_path_id >= 0 && closest_obj_id >= 0)
{
for(unsigned int i=i_start; i<=i_end; i++)
{
direct_paths.push_back(paths.at(closest_path_id).at(i));
}
}
//Visualize Direct Path
m_TTC_Path.markers.clear();
if(direct_paths.size() == 0)
direct_paths.push_back(currState);
PlannerHNS::ROSHelpers::TTC_PathRviz(direct_paths, m_TTC_Path);
pub_TTC_PathRviz.publish(m_TTC_Path);
//calculate TTC
if(direct_paths.size() > 2 && closest_obj_id >= 0)
{
double dd = min_d;
double dv = objs.at(closest_obj_id).center.v - currState.v;
if(fabs(dv) > 0.1)
{
double ttc = (dd - 4) / dv;
cout << "TTC: " << ttc << ", dv: << " << dv <<", dd:" << dd << endl;
}
else
cout << "TTC: Inf" << endl;
}
}
这里是计算TTC的函数,我们暂时先跳过此部分,等到后面作者有时间再叙述一下,这里面到底是如何操作的。
二、SimpleTracker分析
1.构造函数:

构造函数内初始化变量,可以看到:
m_MAX_ASSOCIATION_DISTANCE:最大关联距离,即前后两帧数据的同一个目标距离相差不能超过2m
m_MAX_ASSOCIATION_SIZE_DIFF:最大关联尺寸变化
m_MAX_ASSOCIATION_ANGLE_DIFF:最大关联角度变化
m_MaxKeepTime:最大保留时间
m_nMinTrustAppearances:最少出现次数
UtilityHNS::UtilityH::GetTickCount(m_TrackTimer);这个是封装的一个用来计时的方法:
void UtilityH::GetTickCount(struct timespec& t)
{
while(clock_gettime(0, & t) == -1);
}
timespec结构体存放了两种数据类型:秒 tv_sec 和纳秒 tv_nsec
然后clock_gettime 是time.h中的API,用于查询到当前的系统时刻,并且赋值给timespec
/* Get current value of clock CLOCK_ID and store it in TP. */
extern int clock_gettime (clockid_t __clock_id, struct timespec *__tp) __THROW;
因此此方法就是获得当前时间,并且存放在类内成员方法中m_TrackTimer。
2.初始化方法:
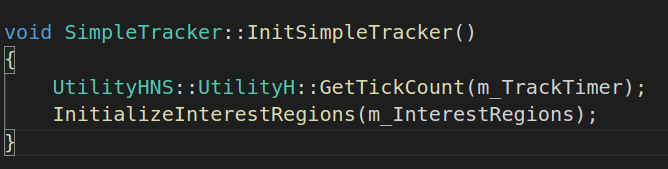
在初始化的时候,又一次更新了m_TrackTimer的时间,同时初始化目标区域。
m_InterestRegions是一个存放InterestCircle类型vector的类内公有成员变量。
std::vector<InterestCircle*> m_InterestRegions;

其中这个类型里面记录了id,区域半径,还有遗忘时间,加上KFTrackV类型的vector。
这个KFTrackV类型便是最底层的kf实现,这里面是调用的CV::KalmanFilter接口,这个会在第三节做介绍
继续InitializeInterestRegions() 方法:
 1.m_CirclesResolution 初始值为5, m_MaxKeepTime为2
1.m_CirclesResolution 初始值为5, m_MaxKeepTime为2
2.进入while循环,可以看到退出循环的唯一条件为:next_raduis半径大于初始值m_Horizon:100
3.初始regions的数量为0,因此会new一个InterestCircle类型的指针,id为1,半径为0。
4.进入if判断,新生成的指针半径即为5, forget_time为2,压入到vector里面。
5.继续函数进程,next_raduis半径增加为1.8倍,但是不能大于m_Horizon:100
6.同时遗忘时间减小为0.75倍,但是不能小于0.1s
因此,此方法会生成
{id, radius, forget_time}
{1, 5, 2}
{2, 9,1.5}
{3, 16.2, 1.125}
{4, 29.16, 0.84375}
{5, 52.488, 0.5339}
{6, 94.4784, 0.4}
{7, 100, 0.3}
这七个interestregion区域
3. DoOneStep方法
 这里为调用cv kf tracker的接口
这里为调用cv kf tracker的接口
1.!m_bEnableStepByStep, 这里launch文件中加载的是false,因此直接进入判断
2. m_bFirstCall为true,即第一次进入滤波器中,需要初始化滤波器,并将m_bFirstCall置为false
3. 更新m_TrackTimer计时器
4. 根据传入的type判断,是什么样的track方式,这里依次分析:
5. AssociateOnly();数据关联
 第一步做前后帧的数据关联:
第一步做前后帧的数据关联:
void SimpleTracker::MatchWithDistanceOnly()
{
newObjects.clear();
m_MatchList.clear();
double d_y = 0, d_x = 0, d = 0;
//std::cout << std::endl << std::endl << std::endl;
while(m_DetectedObjects.size() > 0)
{
double iClosest_track = -1;
double iClosest_obj = -1;
double dClosest = m_MAX_ASSOCIATION_DISTANCE;
double size_diff = 0;
//std::cout << std::endl;
for(unsigned int jj = 0; jj < m_DetectedObjects.size(); jj++)
{
double object_size = sqrt(m_DetectedObjects.at(jj).w*m_DetectedObjects.at(jj).w + m_DetectedObjects.at(jj).l*m_DetectedObjects.at(jj).l + m_DetectedObjects.at(jj).h*m_DetectedObjects.at(jj).h);
for(unsigned int i = 0; i < m_TrackSimply.size(); i++)
{
double old_size = sqrt(m_TrackSimply.at(i).obj.w*m_TrackSimply.at(i).obj.w + m_TrackSimply.at(i).obj.l*m_TrackSimply.at(i).obj.l + m_TrackSimply.at(i).obj.h*m_TrackSimply.at(i).obj.h);
d_y = m_DetectedObjects.at(jj).center.pos.y-m_TrackSimply.at(i).obj.center.pos.y;
d_x = m_DetectedObjects.at(jj).center.pos.x-m_TrackSimply.at(i).obj.center.pos.x;
d = hypot(d_y, d_x);
if(d < dClosest)
{
dClosest = d;
iClosest_track = i;
iClosest_obj = jj;
size_diff = fabs(old_size - object_size);
}
}
}
if(iClosest_obj != -1 && iClosest_track != -1 && dClosest < m_MAX_ASSOCIATION_DISTANCE)
{
std::cout << "MatchObj: " << m_TrackSimply.at(iClosest_track).obj.id << ", MinD: " << dClosest << ", SizeDiff: (" << size_diff << ")" << ", ObjI" << iClosest_obj <<", TrackI: " << iClosest_track << std::endl;
m_MatchList.push_back(std::make_pair(m_TrackSimply.at(iClosest_track).obj.center, m_DetectedObjects.at(iClosest_obj).center));
m_DetectedObjects.at(iClosest_obj).id = m_TrackSimply.at(iClosest_track).obj.id;
MergeObjectAndTrack(m_TrackSimply.at(iClosest_track), m_DetectedObjects.at(iClosest_obj));
newObjects.push_back(m_TrackSimply.at(iClosest_track));
m_TrackSimply.erase(m_TrackSimply.begin()+iClosest_track);
m_DetectedObjects.erase(m_DetectedObjects.begin()+iClosest_obj);
}
else
{
iTracksNumber = iTracksNumber + 1;
m_DetectedObjects.at(0).id = iTracksNumber;
KFTrackV track(m_DetectedObjects.at(0).center.pos.x, m_DetectedObjects.at(0).center.pos.y,m_DetectedObjects.at(0).actual_yaw, m_DetectedObjects.at(0).id, m_dt, m_nMinTrustAppearances);
track.obj = m_DetectedObjects.at(0);
newObjects.push_back(track);
//std::cout << "NewObj: " << iTracksNumber << ", MinD: " << dCloseset << ", MinS: " << min_size << ", ObjI:" << 0 <<", TrackI: " << iCloseset_track << ", ContMatch: " << bFoundMatch << std::endl;
m_DetectedObjects.erase(m_DetectedObjects.begin()+0);
}
}
m_TrackSimply = newObjects;
}
将全局变量新目标newObjects清空,将匹配列表清空,dy,dx,d清空为0
当有检测到目标时:
声明四个局部变量iClosest_track, iClosest_obj, dClosest, size_diff, 并且初始化
遍历所有的检测到的目标:
- 计算目标的尺寸大小object size
- 第一步初始化的时候,m_TrackSimply数量为0, 因此跳过此循环
- if条件不满足,因此进入else部分:
- iTracksNumber = 2,将m_DetectedObjects第一个目标的id置为2,将第一个目标的参数属性传给KFTrackV对象, 并将track对象传到newobjects中,m_DetectedObjects对象删除第一个
- 因此一直遍历,直到m_DetectedObjects的数量为0时,退出循环,因此此方法就是将所有检测的目标赋给每一个滤波器,最后传入到m_TrackSimply中。
如果不是第一次进入此滤波器时,即m_TrackSimply记录了上一帧的检测目标时:
将全局变量新目标newObjects清空,将匹配列表清空,dy,dx,d清空为0
当前帧有目标时:
声明四个局部变量iClosest_track, iClosest_obj, dClosest, size_diff, 并且初始化
遍历所有当前帧的目标:
- 计算目标的尺寸大小object size
- 遍历上一帧的目标:
- 计算上一帧目标的尺寸大小
- 计算出和当前帧目标距离最小的上一帧 size_diff
- 此时if判断会进入前面一项,把匹配的两项压入到m_MatchList 中,同时更新当前检测到的目标id,将上一帧关联的id赋给当前。同时互相更新tracker和obj的参数,并将标志位m_bUpdated更新
 6. 删除两个容器中更新的数据,继续循环,直到m_DetectedObjects清空。
6. 删除两个容器中更新的数据,继续循环,直到m_DetectedObjects清空。
第二步更新数据关联:
 这里对每一个跟踪对象都做UpdateAssociateOnly()操作
这里对每一个跟踪对象都做UpdateAssociateOnly()操作
- 如果目标的center_list的数量大于30,则删除第一个,这里好奇为什么没有用while循环,而是用的if,只算一次
- 如果目标的center_list的数量大于1,即存在多个数据时,算出当前中心的x,y和center_list最后一个的x,y的距离,如果距离大于0.1,把center存入center_list里面,然后调用SmoothPath(), CalcAngleAndCost()函数。否则将中心数据压入到center_list中

看函数的名字是猜测其功能是平滑曲线:
如果输入的path点数少于等于2,直接返回。
然后声明一些局部变量,并初始化赋值,进入while循环。
遍历path的点,循环内会使用path内的点左右数据更新中间点的值,直到相对于原始线变化范围大于容忍值时,退出循环。
因此本函数就是利用两边的点均衡中的点,并且这个均衡程度不能太大,使得变形超过设定的值。
 看函数的名字是计算角度和cost:
看函数的名字是计算角度和cost:
如果输入的path点数少于等于2,直接返回。
如果输入的path只有两个点的时候:使用方法下面的函数将path的角度归一到0 - 2pi内,第一个点的角度和第二个点的角度一致,都为直线的角度,但是1号点的cost是0号点的cost加上两点之间的直线距离。

如果path的点数大于2个时,则cost采用累加的方式,角度等于前一个和当前的点计算出的角度。同时如果两个点重叠的话,为避免计算问题,直接将前一个点的角度赋值给后一个。
因此本函数的功能是计算出所有点累加出来的距离cost,同时算出角度。
- 如果center_list的数据大于3时,bDirection标志位改为true,中心位置的角度改成倒数三个角度的平均值
- 如果center_list的数据大于2时,bDirection标志位改为true,中心位置的角度改成倒数两个角度的平均值
- 如果center_list的数据大于1时,bDirection标志位改为false,中心位置的角度即为最后一个
- 如果center_list的数据为0时,bDirection标志位改为false,即没有方向
因此此处部分是更新了每一个track对象内的center_list存放的数据。
6. AssociateSimply();简单关联
如果type方式为SimpleTracker的时候,则简单关联。

- 遍历每一个跟踪对象,将更新的标志位设置为false,表示没有更新
- 和上述所讲的一样,根据前后帧的目标距离,尺寸变化来做目标匹配,即数据关联
- 遍历跟踪对象,调用UpdateTracking 方法:

- 根据CV版本的不同,设置kf滤波器的转移矩阵
- 将oldObj的位置传递给kf滤波器的修正值
- 将预测的位置传递给predObj对象
- 得到vx,vy预测数据
- 声明局部变量并且初始化
- 如果m_iLife>1,即如果目标生命周期大于1
- 计算出合速度
- 比较前后帧的位置差
- 如果位置变化较大时:
- 角度等于atan2(diff_y,diff_x)
- 否则角度等于之前帧的角度
- 如果位置变化较大时:
- 如果m_iLife > MinAppearanceCount
- 将角度传给预测Obj的角度
- 将速度传给预测Obj的速度
- 预测速度标志为true
- 如果前后帧时间差大于加速度最小计算时间
- 此时的加速度等于前后速度差除以时间 currAccel = (currV - prev_big_v)/time_diff;
- 现在的速度赋值给历史帧速度
- 时间差变为0
- 否则时间差增加一帧
- 加速度保持不变
- 最后对加速度进行一个限制,使得加速度处于-1和1之间
- 否则速度和方向标志为都是为false
- 如果预测的目标中center_list 的尺寸大于PREV_TRACK_SIZE的时候:
- 剔除掉第一个目标(这里仍然没有搞明白为什么不是while循环,保证数目等于设定的数量)
- 下面执行的内容其实就是UpdateAssociateOnly函数的内容
- 滤波器预测m_filter.predict();
- 复制此时的状态量到下一刻
- 将当前时刻的角度,位置,速度,加速度传给前一帧,遗忘时间减去一帧时间,生命周期加一
回到AssociateSimply( ) 主函数进程内,最后也是将跟踪对象传给全局对象m_DetectedObjects内。
- AssociateDistanceOnlyAndTrack();
CleanOldTracks();
如果type等于contour track时,则使用如下的方式进行数据关联更新
void SimpleTracker::AssociateDistanceOnlyAndTrack() {
for(unsigned int i = 0; i < m_TrackSimply.size(); i++)
m_TrackSimply.at(i).m_bUpdated = false;
double d_y = 0, d_x = 0, d = 0;
//std::cout << std::endl;
while(m_DetectedObjects.size() > 0)
{
double iClosest_track = -1;
double iClosest_obj = -1;
double dClosest = m_MAX_ASSOCIATION_DISTANCE;
double size_diff = -1;
double angle_diff = 0;
//std::cout << "DetObjSize: " << m_DetectedObjects.size() << ", TracksSize: " << m_TrackSimply.size() << std::endl;
for(unsigned int jj = 0; jj < m_DetectedObjects.size(); jj++)
{
double object_size = sqrt(m_DetectedObjects.at(jj).w*m_DetectedObjects.at(jj).w + m_DetectedObjects.at(jj).l*m_DetectedObjects.at(jj).l + m_DetectedObjects.at(jj).h*m_DetectedObjects.at(jj).h);
for(unsigned int i = 0; i < m_TrackSimply.size(); i++)
{
d_y = m_DetectedObjects.at(jj).center.pos.y-m_TrackSimply.at(i).obj.center.pos.y;
d_x = m_DetectedObjects.at(jj).center.pos.x-m_TrackSimply.at(i).obj.center.pos.x;
d = hypot(d_y, d_x);
double old_size = sqrt(m_TrackSimply.at(i).obj.w*m_TrackSimply.at(i).obj.w + m_TrackSimply.at(i).obj.l*m_TrackSimply.at(i).obj.l + m_TrackSimply.at(i).obj.h*m_TrackSimply.at(i).obj.h);
size_diff = fabs(old_size - object_size);
// if(m_TrackSimply.at(i).obj.bDirection && m_TrackSimply.at(i).obj.bVelocity && m_TrackSimply.at(i).obj.center.v*3.6 > 3)
// {
// double a_check = UtilityHNS::UtilityH::FixNegativeAngle(atan2(d_y, d_x));
// double a_old = UtilityHNS::UtilityH::FixNegativeAngle(m_TrackSimply.at(i).obj.center.pos.a);
// angle_diff = UtilityHNS::UtilityH::AngleBetweenTwoAnglesPositive(a_check, a_old);
// }
// else
// angle_diff = 0;
if(d < dClosest && size_diff < m_MAX_ASSOCIATION_SIZE_DIFF)
{
dClosest = d;
iClosest_track = i;
iClosest_obj = jj;
}
//std::cout << "Test: " << m_TrackSimply.at(i).obj.id << ", MinD: " << d << ", ObjS: " << object_size << ", ObjI: " << jj << ", TrackS: " << old_size << ", TrackI: " << i << std::endl;
}
}
if(iClosest_obj != -1 && iClosest_track != -1 && dClosest < m_MAX_ASSOCIATION_DISTANCE)
{
//std::cout << "MatchObj: " << m_TrackSimply.at(iClosest_track).obj.id << ", MinD: " << dClosest << ", Sdiff: " << size_diff << ", ObjI: " << iClosest_obj <<", TrackI: " << iClosest_track << std::endl;
m_DetectedObjects.at(iClosest_obj).id = m_TrackSimply.at(iClosest_track).obj.id;
MergeObjectAndTrack(m_TrackSimply.at(iClosest_track), m_DetectedObjects.at(iClosest_obj));
AssociateToRegions(m_TrackSimply.at(iClosest_track));
m_DetectedObjects.erase(m_DetectedObjects.begin()+iClosest_obj);
}
else
{
iTracksNumber = iTracksNumber + 1;
if(iClosest_obj != -1)
{
m_DetectedObjects.at(iClosest_obj).id = iTracksNumber;
KFTrackV track(m_DetectedObjects.at(iClosest_obj).center.pos.x, m_DetectedObjects.at(iClosest_obj).center.pos.y,m_DetectedObjects.at(iClosest_obj).actual_yaw, m_DetectedObjects.at(iClosest_obj).id, m_dt, m_nMinTrustAppearances);
track.obj = m_DetectedObjects.at(iClosest_obj);
AssociateToRegions(track);
m_TrackSimply.push_back(track);
//std::cout << "UnMachedObj: " << iTracksNumber << ", MinD: " << dClosest << ", ObjI:" << iClosest_obj <<", TrackI: " << iClosest_track << std::endl;
m_DetectedObjects.erase(m_DetectedObjects.begin()+iClosest_obj);
}
else
{
m_DetectedObjects.at(0).id = iTracksNumber;
KFTrackV track(m_DetectedObjects.at(0).center.pos.x, m_DetectedObjects.at(0).center.pos.y,m_DetectedObjects.at(0).actual_yaw, m_DetectedObjects.at(0).id, m_dt, m_nMinTrustAppearances);
track.obj = m_DetectedObjects.at(0);
AssociateToRegions(track);
m_TrackSimply.push_back(track);
//std::cout << "NewObj: " << iTracksNumber << ", MinD: " << dClosest << ", ObjI:" << 0 <<", TrackI: " << iClosest_track << std::endl;
m_DetectedObjects.erase(m_DetectedObjects.begin()+0);
}
}
}
for(unsigned int i =0; i< m_TrackSimply.size(); i++)
{
m_TrackSimply.at(i).UpdateTracking(m_dt, m_TrackSimply.at(i).obj, m_TrackSimply.at(i).obj);
}
}
相比于前文的MatchWithDistanceOnly()方法,大致算法流程是一样的,只是增加了个别方法。我们从遍历完前后帧目标后说起:
- 如果当前帧和上一帧存在匹配的目标时,
- 更新m_DetectedObjects
- MergeObjectAndTrack,即将track里面的center_list赋给Obj,obj赋值给track对象,其实就是将obj属性进一步赋值给track对象
- 下面多了一步AssociateToRegions()
 在前文比较前面的位置,我们生成了7个半径,id,遗忘时间不一致的兴趣区域。
在前文比较前面的位置,我们生成了7个半径,id,遗忘时间不一致的兴趣区域。
- 遍历所有m_InterestRegions
- 清空区域内的所有pTrackers
- 如果检测的目标在某个区域内,则将区域内的id赋值给检测目标,还有遗忘时间,并且直接返回
- 如果发现检测目标没有在某个区域内,则将最大的那个区域id和遗忘时间赋值给目标。
因此这个函数就是将检测到的目标分配对应的区域id和遗忘时间。
最后遍历所有的track对象,调用UpdateTracking方法,更新卡尔曼滤波器。
- 遍历所有m_InterestRegions
- 反之如果不存在匹配的目标时,但是iClosest_Obj不等于-1时,显然是不会进此循环的,因此这里代码属于BUG
- 在进入else判断时,也会增加一个关联到兴趣区域的过程
- 最后也是遍历所有track对象,调用UpdateTracking方法,更新卡尔曼滤波器。
关联和跟踪之后,进行CleanOldTracks()

- 清空m_DetectedObjects
- 遍历m_TrackSimply对象,如果忘记时间小于0,并且时间不等于-1000,删除对象
- 否则如果跟踪对象的生命周期大于最小信任出现次数,则将跟踪对象obj传给m_DetectedObjects。
以上就是SimpleTracker.cpp的主要几个函数,剩下的
MatchClosest()
MatchClosestCost()
AssociateAndTrack()
InsidePolygon
都是没有用到的,因此不在这里讲述了,主要流程是一样的,只是增加了几个tricks。
三、KF滤波器(ToDo)
总结
上面便是Autoware里面的lidar_kf_contour_track部分,比较绕,需要慢慢细致理。里面第三节关于滤波器的部分,作者还没有写,等到后续有时间的时候,会继续补充此文档。















 1562
1562











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









