






 文章介绍了差速巡线机器人设计的实验,旨在探索差速驱动技术在机器人巡线中的应用。实验通过微处理器编程实现机器人的快速巡线,利用灰度传感器和轮速传感器进行环境感知和速度控制。针对巡线算法,文中提出了简单的控制策略,但也指出其导致的机器人巡线不稳定问题,强调了未来改进的需求。
文章介绍了差速巡线机器人设计的实验,旨在探索差速驱动技术在机器人巡线中的应用。实验通过微处理器编程实现机器人的快速巡线,利用灰度传感器和轮速传感器进行环境感知和速度控制。针对巡线算法,文中提出了简单的控制策略,但也指出其导致的机器人巡线不稳定问题,强调了未来改进的需求。
实践项目名称:差速巡线机器人设计
实验目的
基于差速机器人底盘和传感器,使用微处理器编程实现机器人快速巡线行驶。
差速巡线机器人设计实验的目的是为了探索差速驱动技术在机器人巡线中的应用。通过设计和制作差速巡线机器人,可以测试其在不同地形和环境下的巡线能力和稳定性,同时也可以探索差速驱动技术在机器人运动控制中的优势和局限性。此外,该实验还可以促进自己对机器人控制和运动学的理解和应用能力的提升。

图1.1 差速巡线机器人场景设计
差速巡线机器人是一种能够自主巡线的机器人,其设计的实验目的是为了探究机器人在不同环境下的自主导航能力和巡线精度。通过对机器人的设计和实验,可以深入了解机器人的巡线原理和控制方法,进一步提高机器人的自主导航能力和巡线精度,为机器人在实际应用中的推广和应用提供技术支持。
实验意义或者动机
通过这个实验能够将自动控制原理的闭环控制,应用到巡线机器人案例上,真正理解并能够应用控制算法实现机器人的巡线任务。
差速巡线机器人设计实验的意义在于探索机器人在不同环境下的自主导航能力,特别是在复杂地形和障碍物较多的情况下。通过设计和实验,可以提高机器人的巡线精度和稳定性,同时也可以为机器人在工业、农业、医疗等领域的应用提供技术支持。
差速巡线机器人是一种能够自主巡线的机器人,其设计实验的意义在于探索机器人自主导航和控制的技术,以及应用于工业自动化、智能交通等领域。通过差速驱动和巡线传感器的结合,机器人能够实现精准的路径跟踪和避障,提高了机器人的自主性和智能化水平。此外,差速巡线机器人的设计实验还可以促进学生对机器人技术的理解和应用,培养学生的创新能力和实践能力。
表1 实验预期目标
巡线指标 | 稳定 | 速度 |
控制算法A | √ | ? |
控制算法A+ | √ | √ |
实验步骤
3.1底盘
差速巡线机器人地盘设计通常采用两个驱动轮和一个自由转动的支撑轮,驱动轮通过电机驱动,可以实现机器人的前进、后退、转弯等动作。此外,差速巡线机器人还需要配备差速装置,以便在行驶过程中能够灵活地调整两个驱动轮的转速,从而实现机器人的转向和平稳行驶。
在地盘的设计中,需要考虑机器人的重心平衡和稳定性,以及机器人的结构强度和耐用性。通常采用铝合金等轻质材料制作机器人的底盘和支架,同时采用橡胶轮胎和减震装置来提高机器人的稳定性和行驶平稳性。
图3.1 底盘左右轮和万向轮布局
此外,差速巡线机器人还需要配备传感器和控制系统,以便实现对机器人的自主导航和巡线功能。传感器通常包括红外线传感器、超声波传感器、光电传感器等,可以实现对机器人周围环境的感知和识别。控制系统则可以根据传感器的反馈信息,实现对机器人的运动轨迹和速度的控制和调整。
3.2传感器
差速巡线机器人的传感器布局通常包括两个灰度传感器和两个轮速传感器。灰度传感器用于检测地面上的黑线,以便机器人能够沿着线路行驶。轮速传感器则用于测量机器人的轮子转速,以便控制机器人的速度和方向。这些传感器通常安装在机器人的底部,以便能够接触到地面并准确地检测黑线和轮子转速。
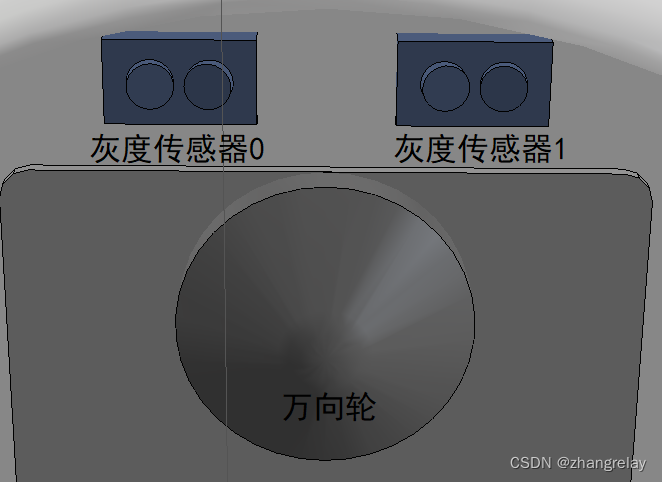
图3.2 灰度传感器布局
3.3 编程
机器人闭环巡线可视化界面如下:
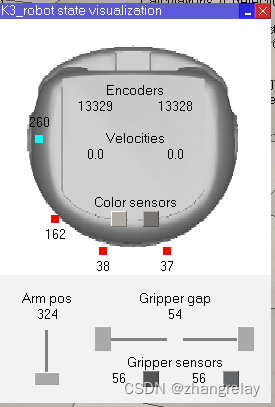
图3.3 机器人灰度传感器和两轮速度等可视化人机交互界面
1. 获取传感器的具体数值
|
说明,0,1分别代表左和右两个传感器。
设置左右轮速度
|
3.4 巡线算法
依据左右灰度传感器与黑线的偏差值调整机器人左右轮速度。
算法a
|
bang-bang控制 |
算法a+
|
3.5 调试
4. 实验结果和分析
算法a控制量不平滑,导致机器人巡线晃动较大。
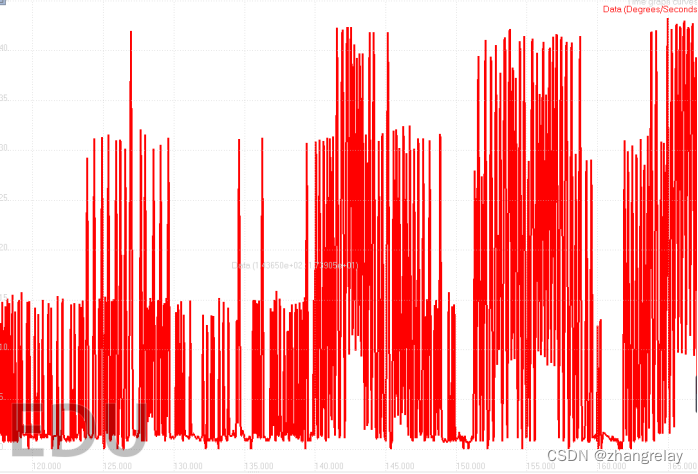
图4 巡线行驶过程中算法a的左轮控制量曲线
总结和展望
依据实验目标实现了移动机器人巡线,但是控制不平滑,机器人运动过程中晃动明显,需要后续继续完善。
参考文献
1 V-Rep参考手册
2 移动机器人巡线原理与实践
3 自动控制原理


















 6125
6125

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











