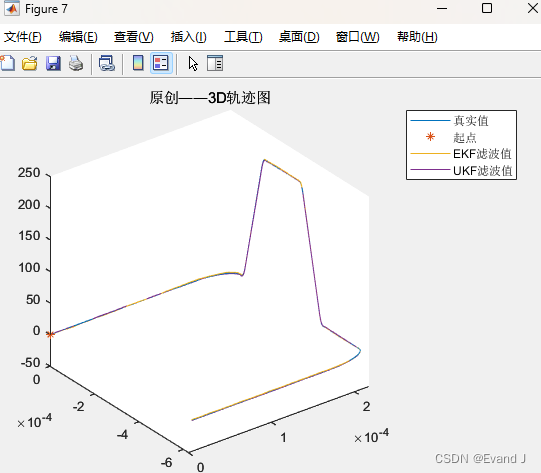
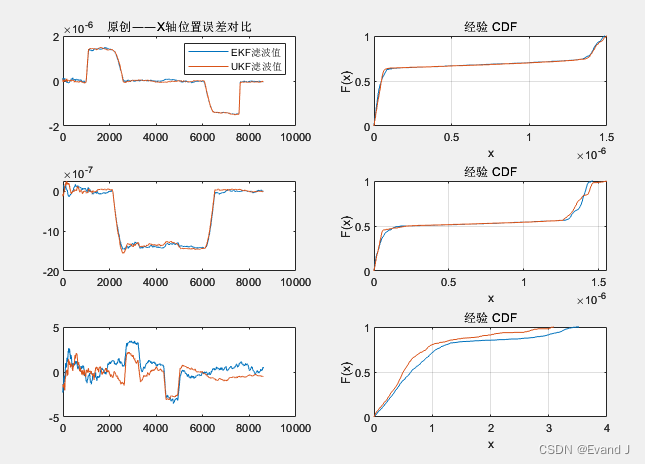
代码简述 【务必注意】 需要事先安装PSINS工具箱!!! 如果没有工具箱,网上面很多,实在找不到可以找我要链接。没有工具箱是无法直接运行本程序的。 程序根据153的模型(15维状态量、3维GNSS观测量),在自己定义了一个运动路径后,使用EKF和UKF对状态进行估计,并绘制轨迹图、估计值的时序图、误差图。 运行截图 空间轨迹图: 三轴的误差图和误差的累积概率密度图像(CDF): 代码








 该博客介绍了如何利用PSINS工具箱进行组合导航的EKF(扩展卡尔曼滤波)和UKF(无迹卡尔曼滤波)对比分析。作者基于153模型,定义了一个运动路径,并展示了运行结果,包括空间轨迹图、三轴误差图以及误差的累积概率密度图像(CDF)。请注意,需先安装PSINS工具箱才能运行代码。
该博客介绍了如何利用PSINS工具箱进行组合导航的EKF(扩展卡尔曼滤波)和UKF(无迹卡尔曼滤波)对比分析。作者基于153模型,定义了一个运动路径,并展示了运行结果,包括空间轨迹图、三轴误差图以及误差的累积概率密度图像(CDF)。请注意,需先安装PSINS工具箱才能运行代码。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 344
344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








