







本MATLAB代码实现了基于扩展卡尔曼滤波器( E K F EKF EKF)的 S a g e − H u s a Sage-Husa Sage−Husa滤波算法,主要用于对非线性系统状态的估计。以下是代码的详细介绍,包括主要功能、实现步骤及其应用场景
运行结果
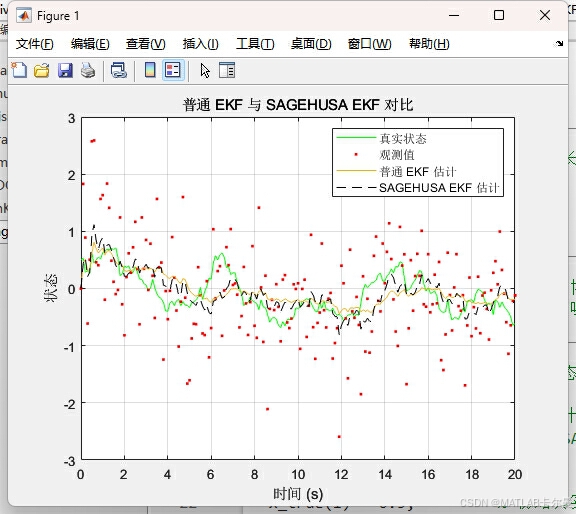
状态曲线对比:
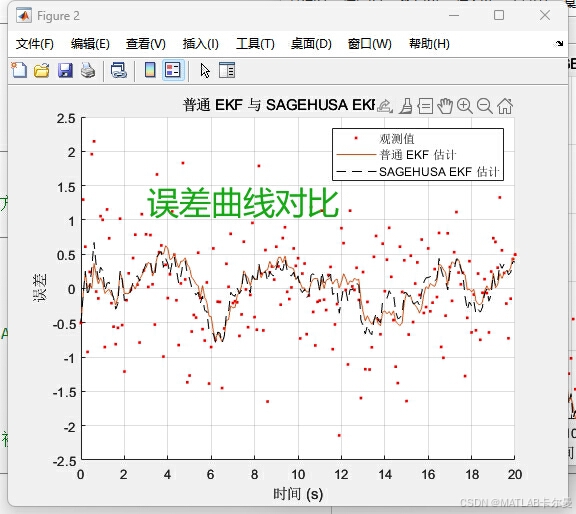
误差对比:
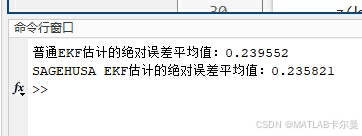
误差平均值输出(命令行截图):
代码介绍
功能概述
- 状态估计:通过EKF和Sage-Husa算法估计非线性系统的状态。
- 噪声模拟:在观测值中添加过程噪声和观测噪声,以模拟真实环境下的系统行为。
- 结果可视化:绘制真实状态、观测值和滤波估计结果,以便进行比较分析。
主要参数
-
时间设置:
dt:时间步长,设置为0.1秒。T:总时间,设置为20秒。
-
系统噪声:
processNoiseCov:过程噪声协方差,影响状态转移模型的噪声。measurementNoiseCov:观测噪声协方差,影响观测模型的噪声。
初始化
- 创建真实状态、观测值和估计值的数组:
x_true:真实状态数组。z:观测值数组。x_est_EKF:EKF估计值数组。x_est_SAGEHUSA:Sage-Husa EKF估计值数组。
系统模型和观测值模拟
使用一个非线性系统模型(通过正弦函数实现)生成真实状态,并在观测值中添加随机噪声,以模拟真实环境中的观测情况。
结果输出与误差分析
-
绘制真实状态、观测值、EKF估计和Sage-Husa EKF估计的对比图,以及各自的误差图。
-
通过图表,用户可以直观地看到不同滤波算法的效果。
-
计算并输出两种估计方法的平均绝对误差,以量化其性能。
源代码
代码结构如下:
部分代码如下:
clc; clear; close all; % 清除命令行、工作空间和关闭所有图形窗口
rng(0); % 设置随机种子以保证结果可重复
%% 模拟参数
dt = 0.1; % 时间步长(0.1秒)
T = 20; % 总模拟时间(20秒)
time = 0:dt:T; % 生成时间向量,从0到T,步长为dt
N = length(time); % 计算时间步数
%% 系统参数设置
processNoiseCov = 1; % 过程噪声协方差,表示系统模型的不确定性
measurementNoiseCov = 0.5; % 观测噪声协方差,表示测量的不确定性
%% 初始化状态
x_true = zeros(N, 1); % 初始化真实状态数组
z = zeros(N, 1); % 初始化观测值数组
x_est_EKF = zeros(N, 1); % 初始化普通EKF估计数组
x_est_SAGEHUSA = zeros(N, 1); % 初始化SAGEHUSA EKF估计数组
% 初始状态设置
x_true(1) = 0.5; % 设置初始真实状态
x_est_EKF(1) = 0; % 设置EKF的初始估计为0
x_est_SAGEHUSA(1) = 0; % 设置SAGEHUSA EKF的初始估计为0
总结
通过本例程,用户可以深入理解基于EKF的Sage-Husa滤波算法的实现过程,以及在非线性系统状态估计中的应用。该代码提供了一种有效的工具,用于分析和比较不同滤波方法在实际应用中的性能。
如有代码定制、讲解等需求,欢迎交流:


















 266
266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











