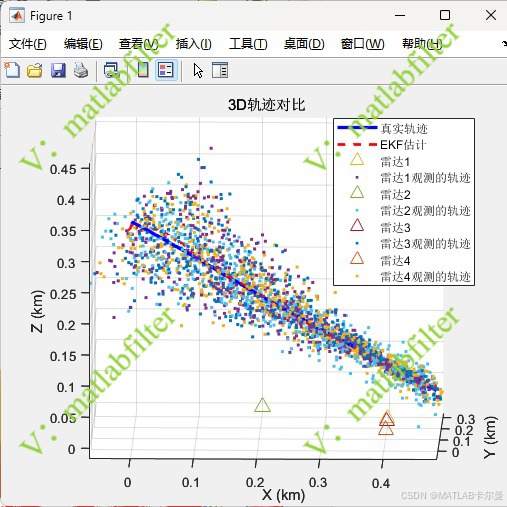
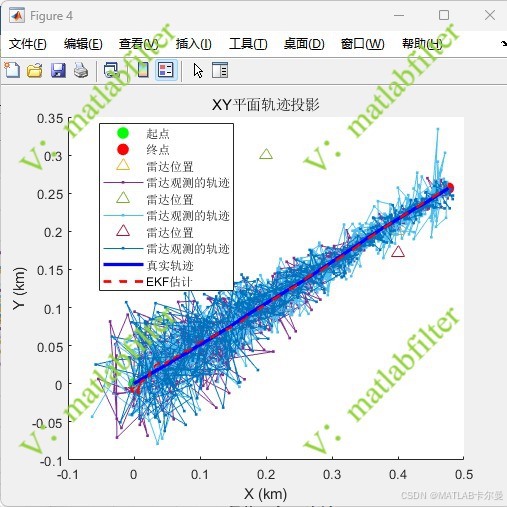
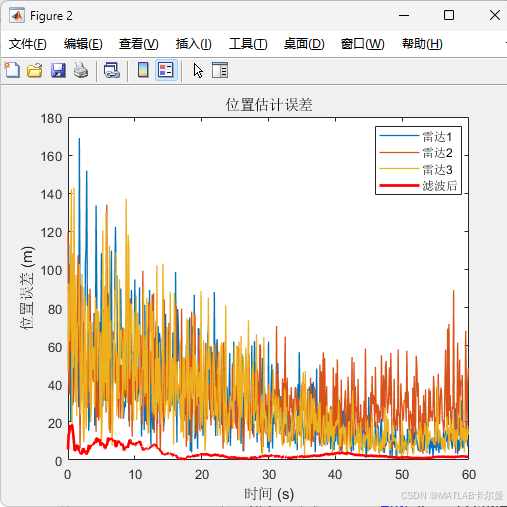
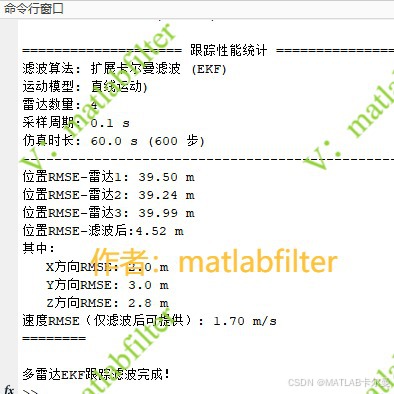
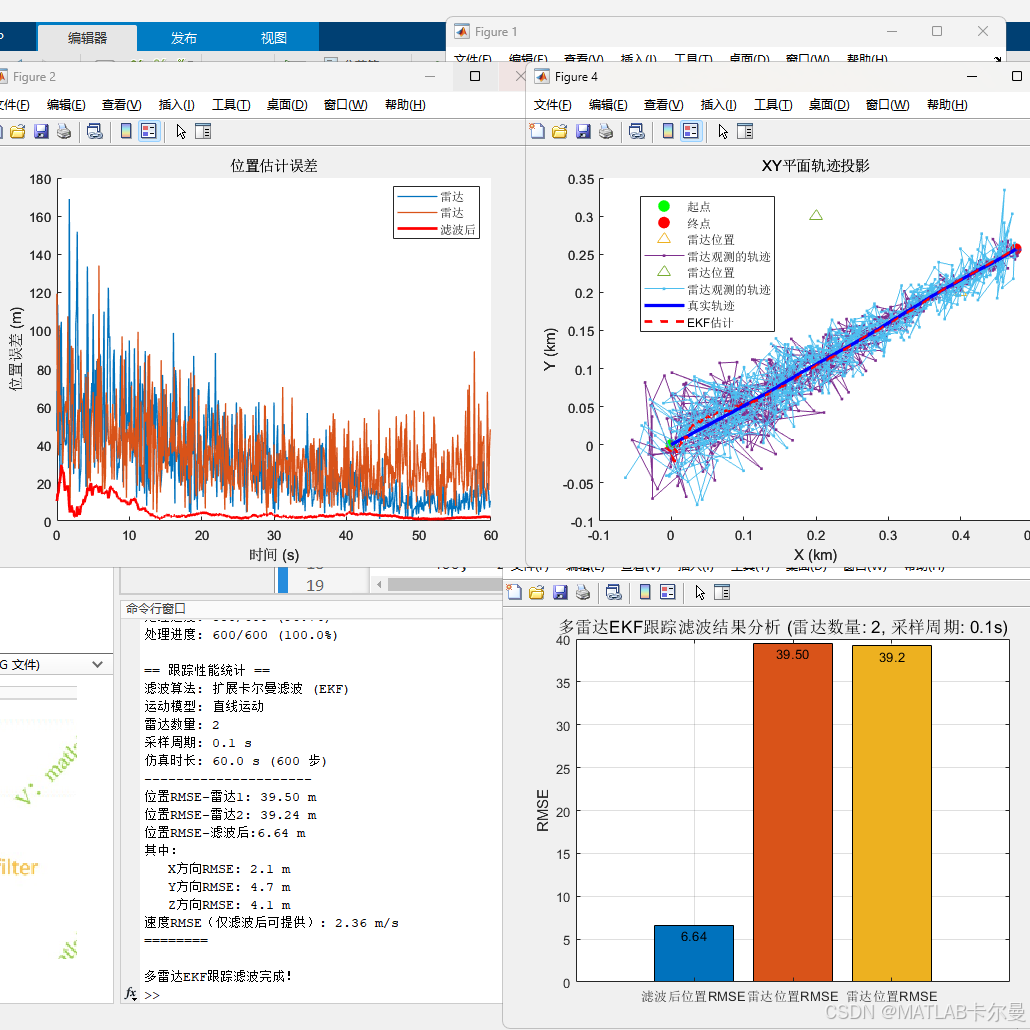
多雷达观测的三维目标跟踪系统,能够在存在测量噪声与过程噪声的情况下,对目标的空间位置、速度以及角速度进行融合估计。程序结构完整,适用于多雷达协同目标跟踪算法的研 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果 文章目录 运行结果 MATLAB源代码 程序详解 算法原理概述 系统功能说明 主要参数可配置项 结果输出说明 应用与扩展 运行结果 轨迹对比: 误差曲线对比: 跟踪性能统计结果(命令行截图): 2个雷达的情况: MATLAB源代码 完整代码如下: % 多雷达三维目标跟踪滤波系统 - EKF实现









 订阅专栏 解锁全文
订阅专栏 解锁全文


















 310
310

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








