






大家好,我是虎哥,最近这段时间,又手欠入手了锐驰LakiBeam 1L激光雷达,实在是性价比太优秀,话说,最近激光雷达圈确实有点卷。锐驰官网的资料已经很丰富,我这里总结一下自己的简单测试经验,分享给大家。
LakiBeam1L是锐驰智光面向中低速场景研发的单线激光雷达产品,拥有比 LakiBeam1更远的探测距离、更高的数据采样率和更高的角分辨率。工业设计精巧紧凑,使得产品体积小、重量轻、性能高,支持超高频采样和角分辨率可选择,探测距离内实现零盲区。
目录
一、LakiBeam1L单线激光介绍
官网入口:LakiBeam 1L-锐驰智光 | RichBeam | 集成式激光雷达服务商

LakiBeam1L可用于工业自动化、港口自动化等自动化领域,广泛应用于AGV避障可作为室内机器人的主激光和室外机器人的斜激光使用,用于建图和避障。
LakiBeam系列产品是一款典型的基于脉冲飞行时间(pToF,pulsed Time of Flight)原理设计的激光雷达,产品内部由激光器,光电探测器,光学系统,计时器等组成。其测距的核心原理是通过激光器发射出一束脉冲激光并启动计时器,当激光照射到目标表面时会发生漫反射并返回到光电探测器,光电探测器接收到信号后将计时器停止,此时我们得到了激光接收到发射时刻的时间差,该时间就是光的飞行时间。用光速乘以光的飞行时间得到的就是光的飞行距离,从而计算出设备到测量目标的距离。
1.1 核心参数
-
扫描原理 :机械旋转
-
测距原理:脉冲TOF
-
探测距离:≥40m@70%反射率;≥20m@10%反射率
-
水平视场角:270°
-
数据采样率:43.2kHz
-
水平角分辨率及对应旋转频率:10Hz/0.1°; 25Hz/0.25°;20Hz/0.25°;30Hz/0.25°
-
数据传输方式 :UDP/IP(百兆以太网)
-
数据输出 :距离、角度、回波强度、时间
-
波长 :940nm
-
防护等级 :IP65
-
工作电压 :9~36V
-
工作温度 :(-25°~60°)
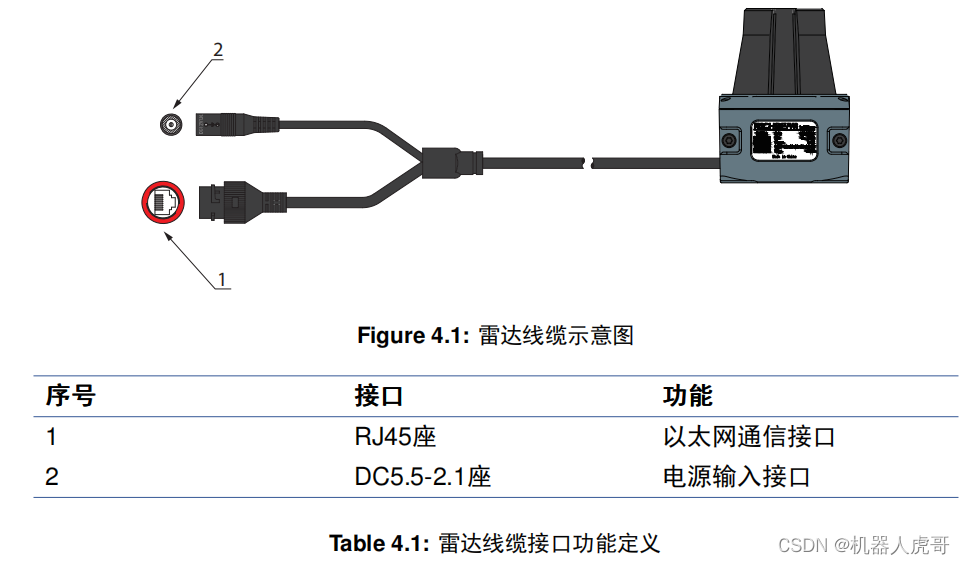
1.2 主机接口
LakiBeam系列产品电缆接口的具体连接定义如下:
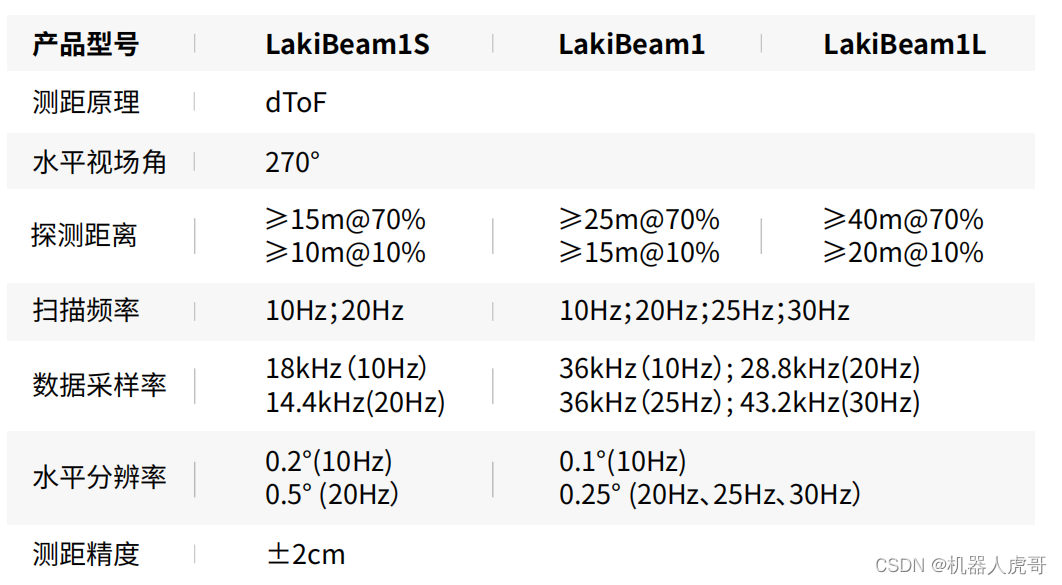
1.3 LakiBeam单线系列产品参数对比
二、WIN端测试配置
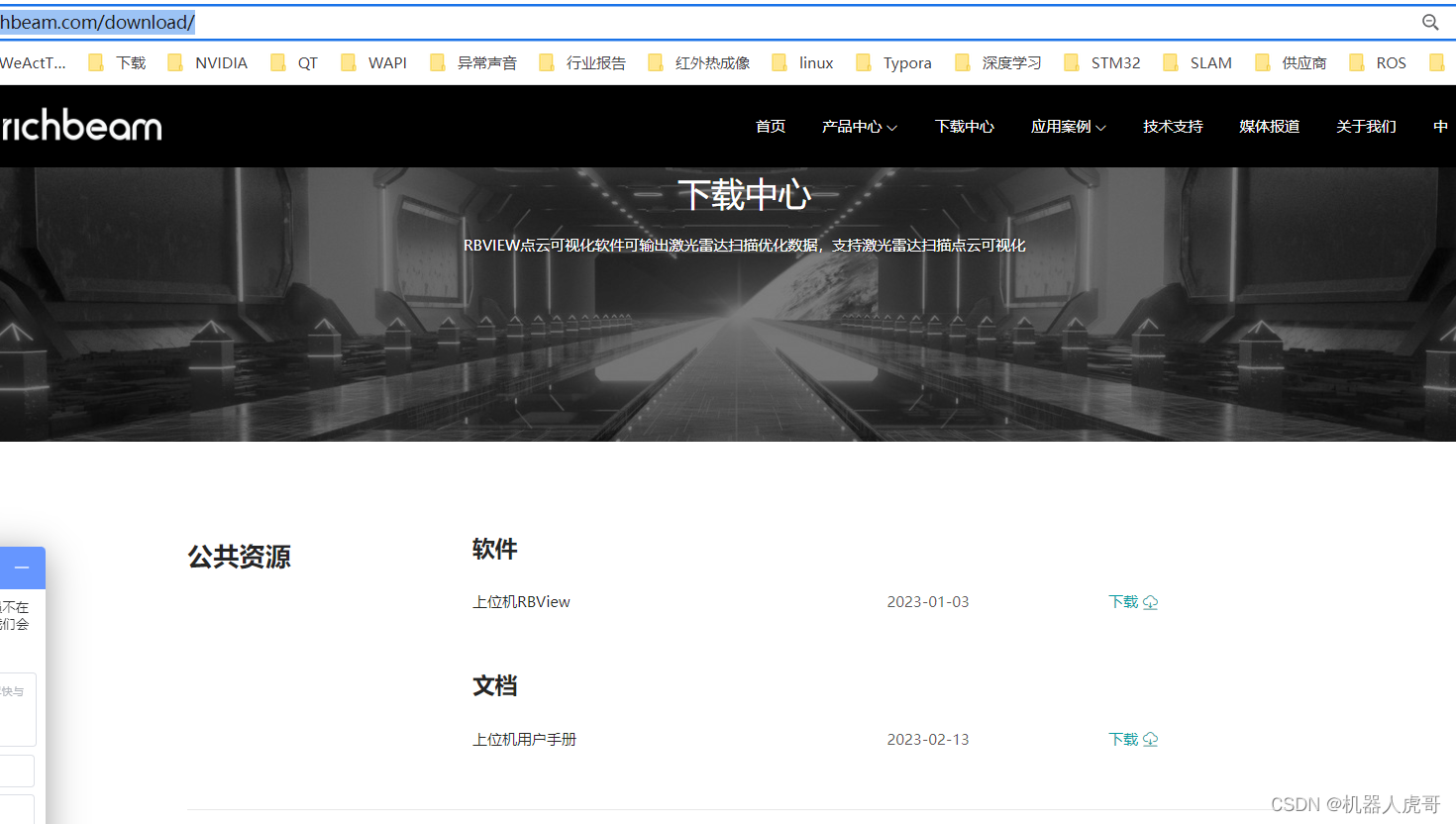
在WIN端测试激光雷达和配置激光雷达,需要安装官方提供的RBView软件。其资源获取位置为:下载中心-锐驰智光 | RichBeam | 集成式激光雷达服务商
2.1 安装RBView过程


2.2 链接雷达
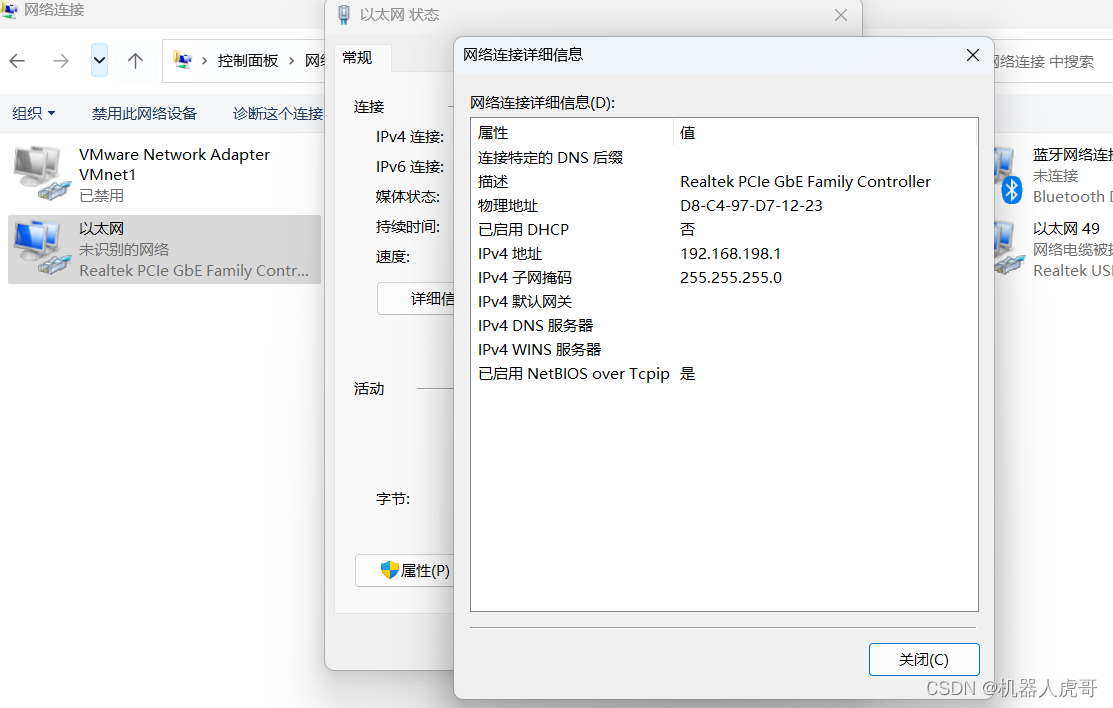
LakiBeam1(L)在上电后就开始进行工作,开始数据的采集与传输。雷达出厂默认的网络设置为静态模式,其中雷达 IP 地址为 192.168.198.2,子网掩码 255.255.255.0。电脑(或其他连接雷达的设备)的 IP 地址为 192.168.198.1,端口号为 2368。
修改自己电脑,链接雷达网口的固定IP:
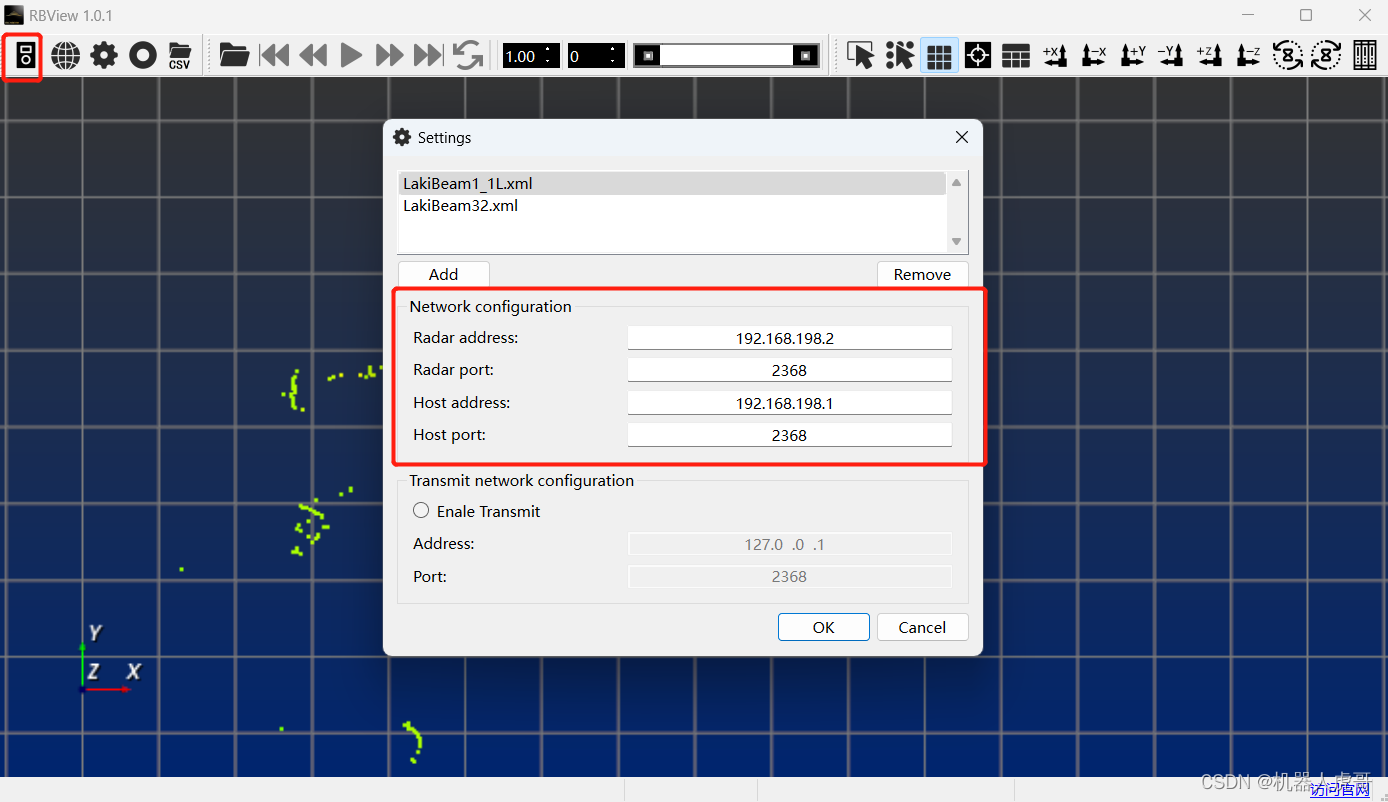
然后打开软件:

配置雷达信息
然后打开数据传输:
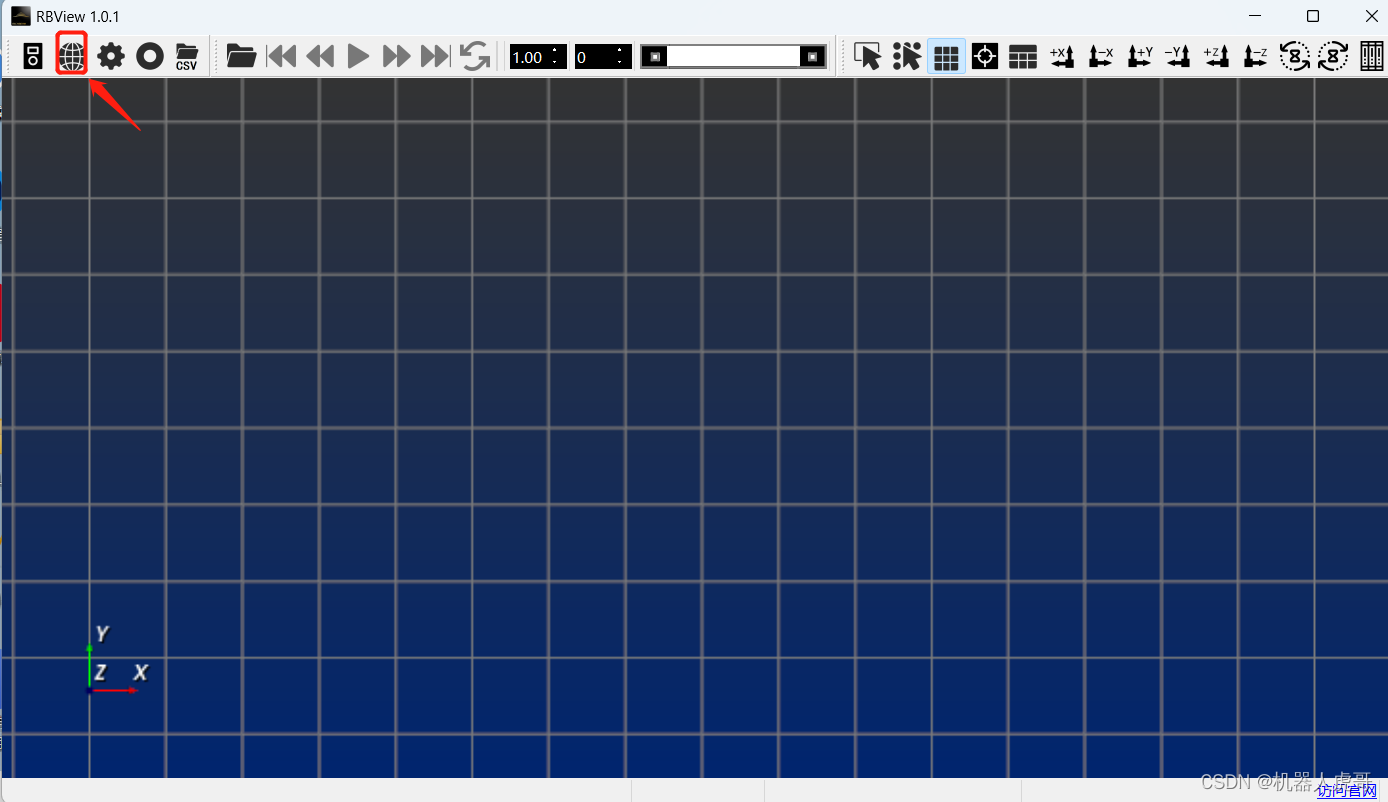
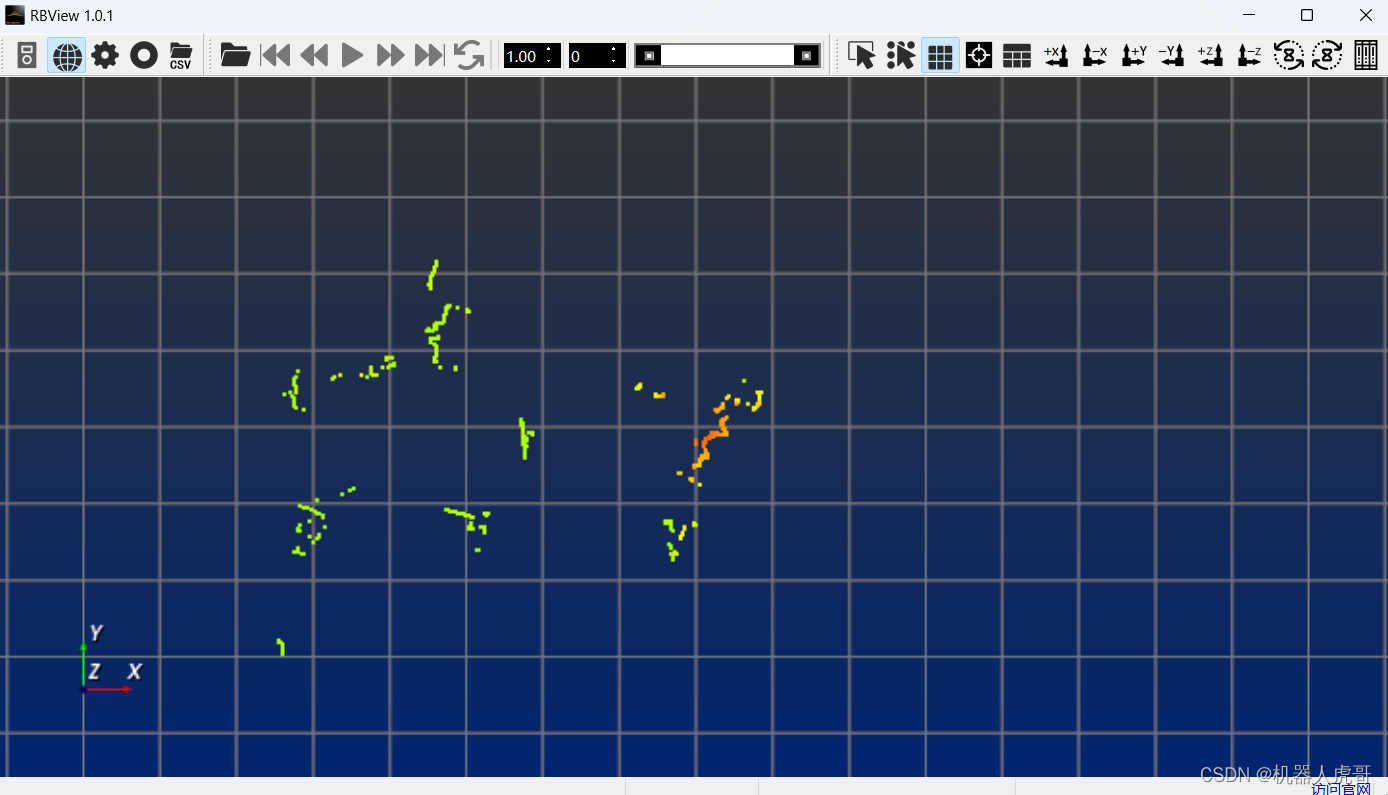
链接网络后就可以看到点云了
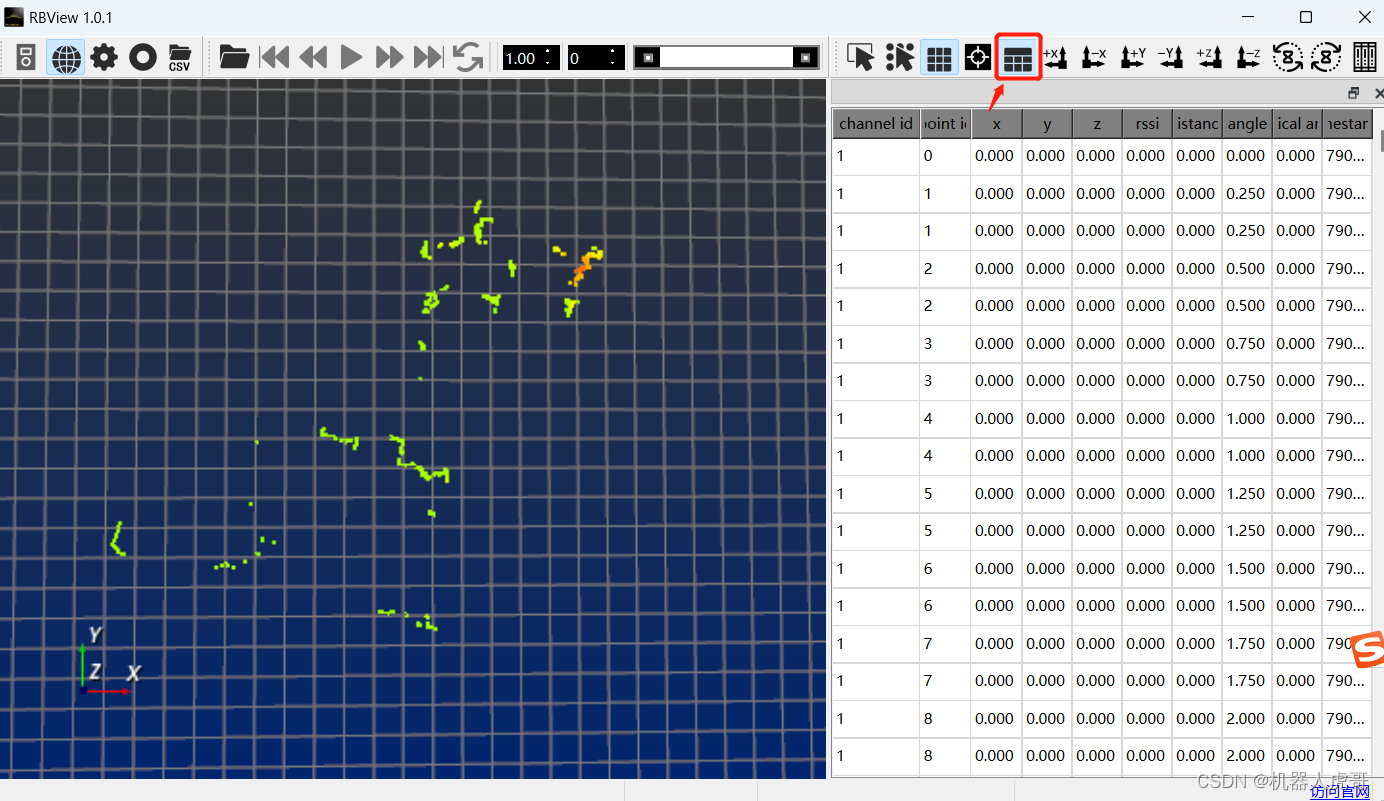
表格形式查看数据:
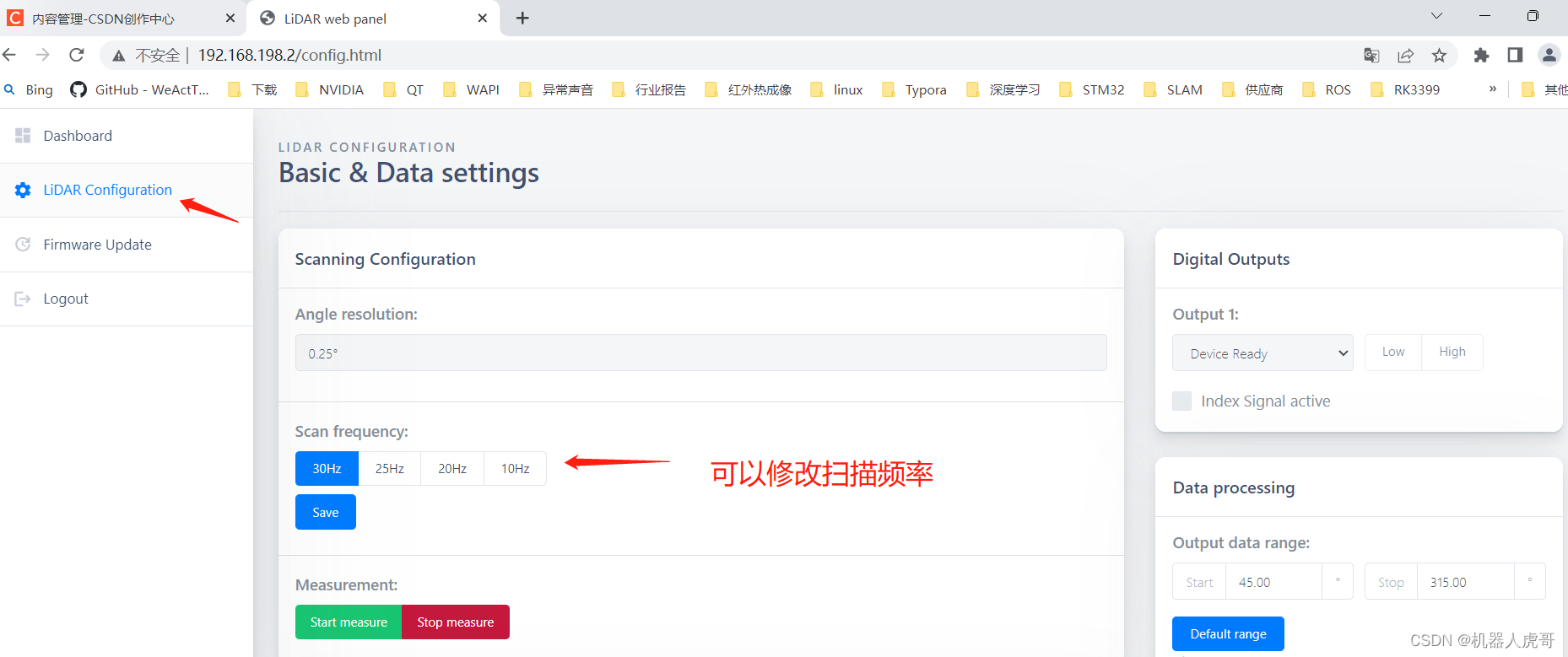
2.3 根据需要修改配置,一般改最多的就是IP信息
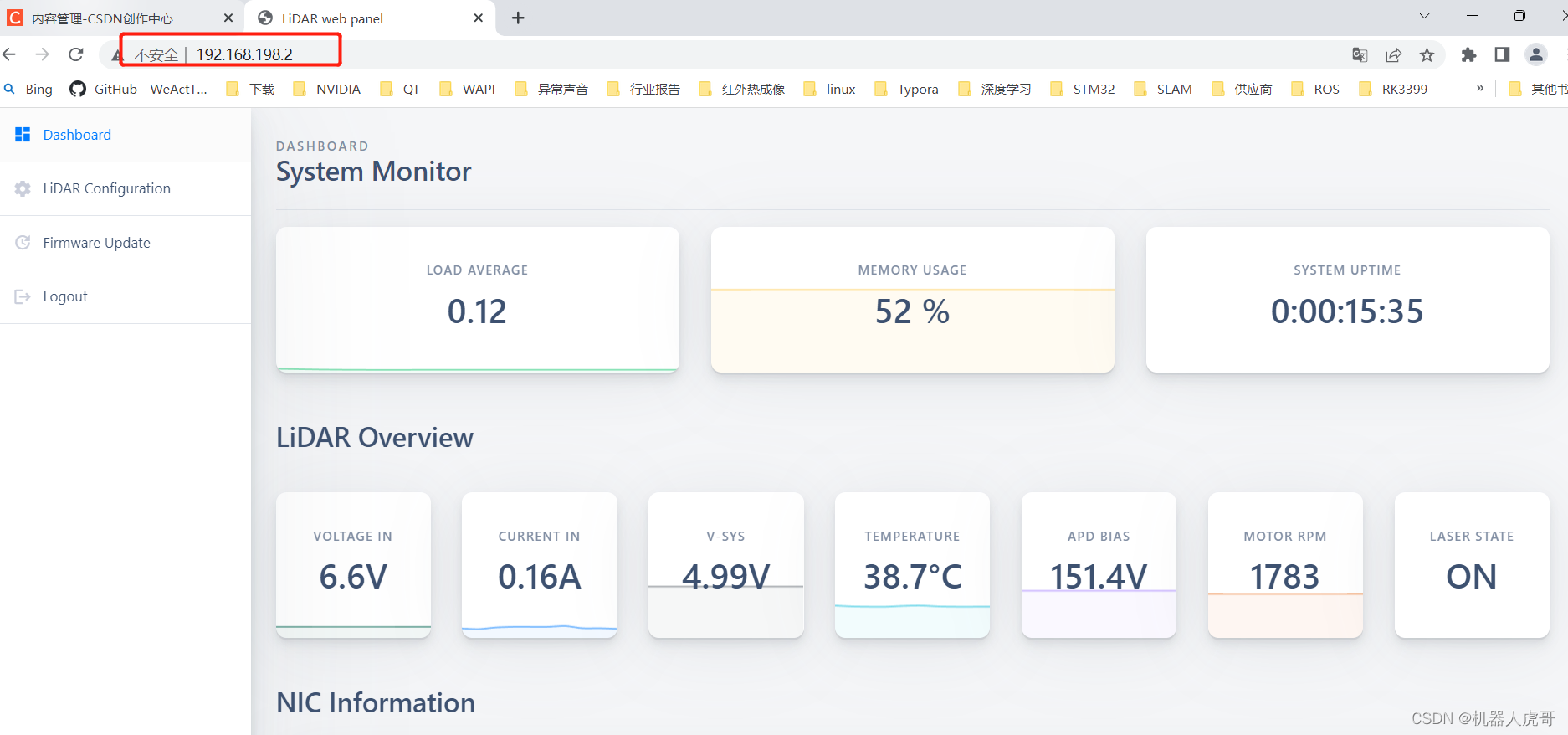
LakiBeam 雷达修改配置信息,是采用WEB网页的形式,雷达内置了一个关了配置网页。浏览器地址栏输入对应的雷达IP地址即可。
我们最常用的就是修改IP:
找到网络管理:
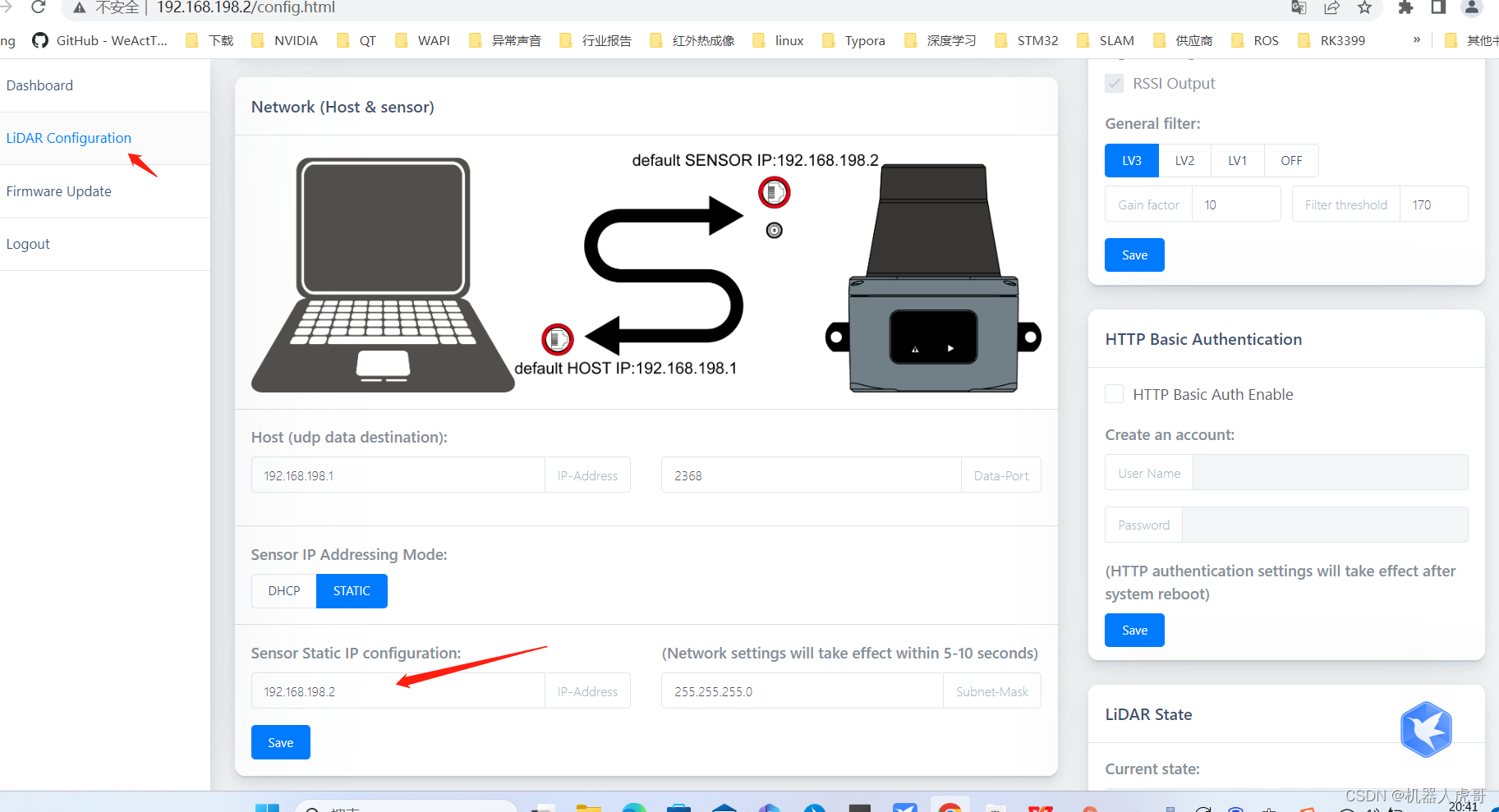
尝试修改IP:我们尝试将IP修改为192.168.9.2,记得不要用8网段,因为8网段是给USB接口的雷达预留的。
 需要注意的是更改网络配置后必须对设备进行重启操作,新的网络配置信息将在下一次启动时自动应用。所以我们给雷达重新上电
需要注意的是更改网络配置后必须对设备进行重启操作,新的网络配置信息将在下一次启动时自动应用。所以我们给雷达重新上电
意也罢我们电脑链接雷达的网卡IP修改到9网段。
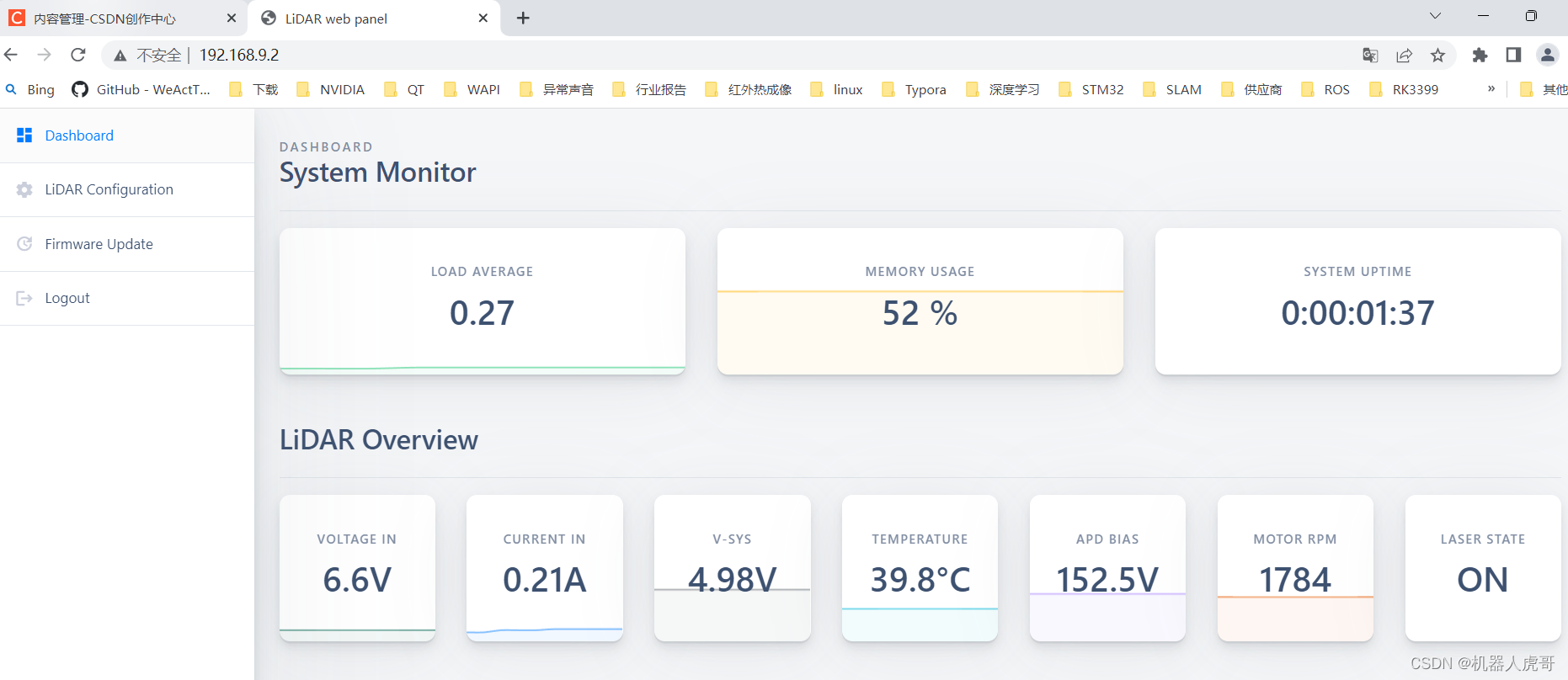
我们可以再打开网页看看:
接下来,我们就需要在ROS1内,对接雷达驱动了。
三、ROS下查看点云
上面WIN端,我们修改了IP信息,这里将雷达网口和测试主板链接到一起。ROS下的驱动官网既可以下载到。
3.1 建立工作空间
mkdir -p ~/LakiBeam_ws/src
cd ~/LakiBeam_ws/
catkin_make
source devel/setup.bash3.2 拷贝代码
cd ~/LakiBeam_ws/src
#将官网地址的代码包放置到这个目录解压
unzip Lakibeam1-ROS1-master.zip
#移动修改一下文件包
mv Lakibeam1-ROS1-master/lakibeam1_ros_v1_0_0 ./

3.3 编译源码包
cd ~/LakiBeam_ws
catkin_make --pkg lakibeam1 编译完成。
编译完成。
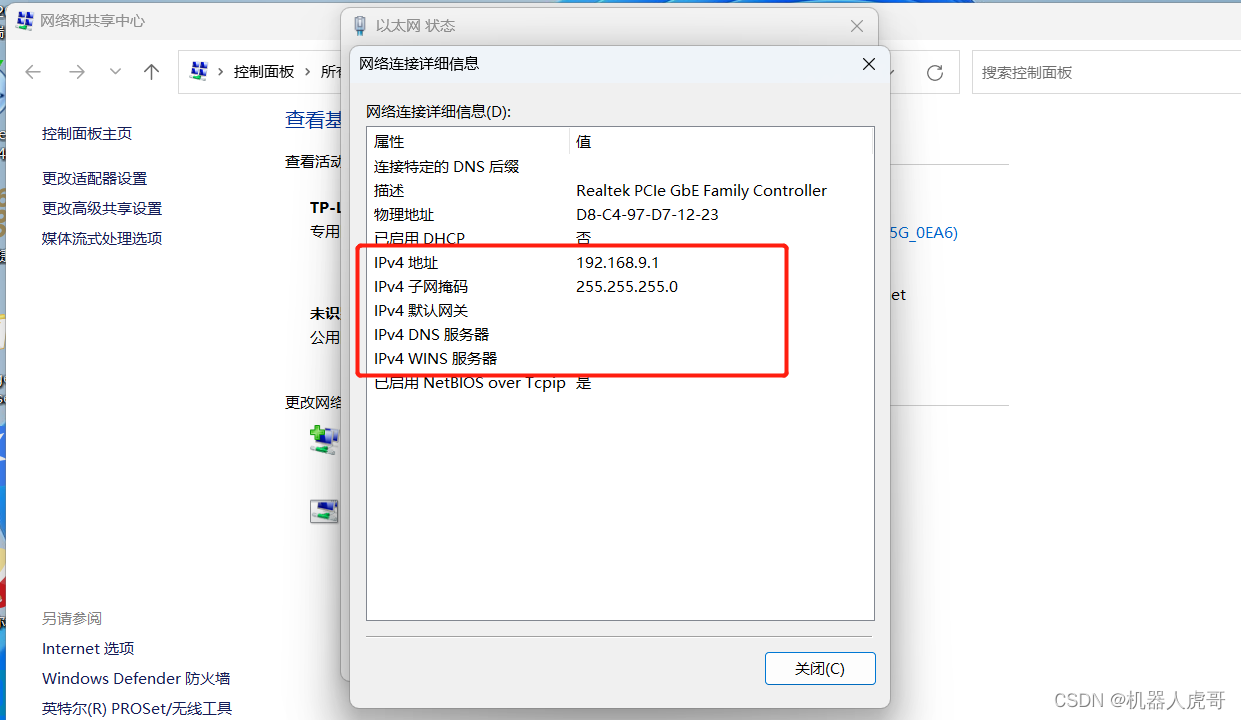
3.4 将板子IP修改到和雷达同一个网段
我是将雷达直接连到板子网口的,所以对应网口IP我需要设置一个固定IP。雷达IP,见2.3.
板子IP:
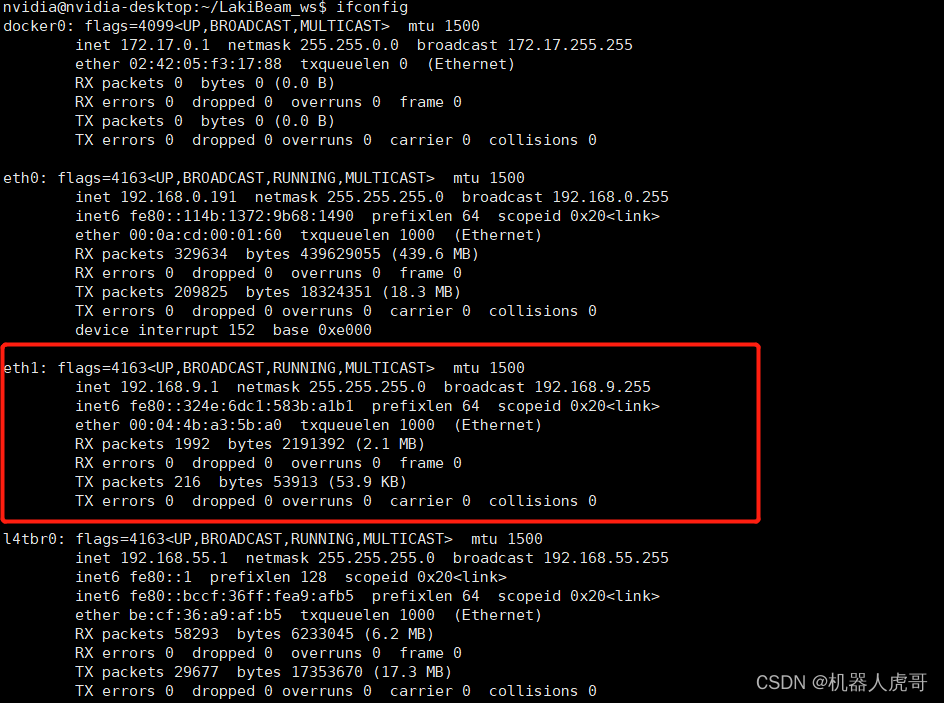
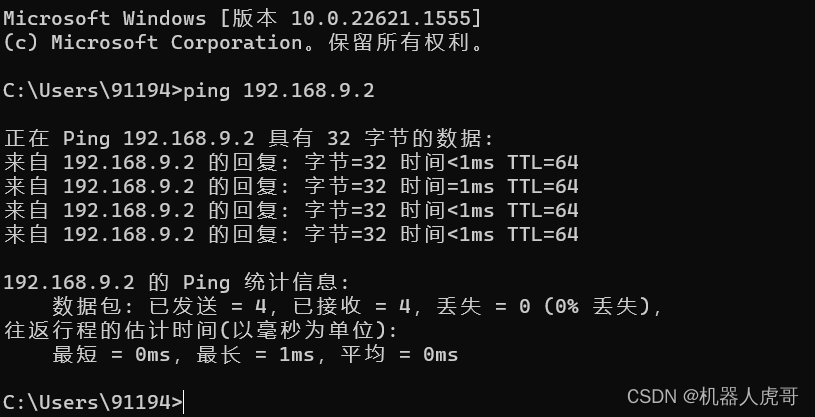
可以ping通雷达。

雷达和板子已经在同一个网段了。
3.5 修改ROS 驱动启动脚本中对应的信息
刚才我们根据需要已经修改了IP,接下来我们测试,需要使用脚本启动,需要修改脚本的对应IP信息。
cd ~/LakiBeam_ws/src/lakibeam1_ros_v1_0_0/launch lakibeam1_scan.launch 脚本原始内容是:
lakibeam1_scan.launch 脚本原始内容是:
<?xml version="1.0"?>
<launch>
<node name="richbeam_lidar" pkg="lakibeam1" type="lakibeam1_scan_node" output="screen">
<remap from="/richbeam_lidar/scan" to="/scan" />
<param name="frame_id" type="string" value="laser"/><!--frame_id设置-->
<param name="output_topic" type="string" value="scan" /><!--topic设置-->
<param name="inverted" type="bool" value="false"/><!--配置是否倒装,true倒装-->
<param name="hostip" type="string" value="0.0.0.0"/><!--配置本机监听地址,0.0.0.0表示监听全部-->
<param name="sensorip" type="string" value="192.168.198.2"/><!--配置sensor地址-->
<param name="port" type="string" value="2368"/><!--配置本机监听端口-->
<param name="angle_offset" type="int" value="0"/><!--配置点云旋转角度,可以是负数-->
<param name="scanfreq" type="string" value="30" /><!--配置扫描频率,范围:10、20、25、30-->
<param name="filter" type="string" value="3" /><!--配置滤波选项,范围:3、2、1、0 -->
<param name="laser_enable" type="string" value="true" /><!--雷达扫描使能,范围:true、false-->
<param name="scan_range_start" type="string" value="45" /><!--雷达扫描起始角度,范围:45~315-->
<param name="scan_range_stop" type="string" value="315" /><!--雷达扫描结束角度,范围:45~315,结束角度必须大于起始角度-->
</node>
</launch>修改其中的IP至,雷达实际IP。其它可以先不动。

保存退出后我们就可以开始测试了。
3.6 启动驱动
cd ~/LakiBeam_ws
source devel/setup.bash
#启动驱动
roslaunch lakibeam1 lakibeam1_scan.launch 新启动一个终端,我们可以初步看看驱动的一些节点信息:
新启动一个终端,我们可以初步看看驱动的一些节点信息:
rosnode list
/richbeam_lidar
/rosout
rosnode info /richbeam_lidar
--------------------------------------------------------------------------------
Node [/richbeam_lidar]
Publications:
* /rosout [rosgraph_msgs/Log]
* /scan [sensor_msgs/LaserScan]
Subscriptions: None
Services:
* /richbeam_lidar/get_loggers
* /richbeam_lidar/set_logger_level
contacting node http://nvidia-desktop:34381/ ...
Pid: 23720
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (56409 - 127.0.0.1:38770) [9]
* transport: TCPROS
rostopic echo /scan
--------------------------------------------------------------------------------
header:
seq: 2722
stamp:
secs: 1683724227
nsecs: 406509496
frame_id: "laser"
angle_min: -3.14159274101
angle_max: 3.14159274101
angle_increment: 0.00436332309619
time_increment: 2.35379829974e-05
scan_time: 0.0338946953416
range_min: 0.0
range_max: 100.0
ranges: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0】4.6 启动RVIZ查看点云
查看点云方法1:
保持驱动是启动的情况下。我们使用nomachine链接到桌面,然后使用官方设置好的配置文件查看点云。
cd ~/LakiBeam_ws
source devel/setup.bash
#修改一下配置文件lakibeam1_scan_view.launch中的IP
#启动驱动 记得关闭之前打开的节点 这个节点会再打开一遍节点
roslaunch lakibeam1 lakibeam1_scan_view.launch修改后:
<?xml version="1.0"?>
<launch>
<node name="richbeam_lidar" pkg="lakibeam1" type="lakibeam1_scan_node" output="screen">
<remap from="/richbeam_lidar/scan" to="/scan" />
<param name="frame_id" type="string" value="laser"/><!--frame_id设置-->
<param name="output_topic" type="string" value="scan" /><!--topic设置-->
<param name="inverted" type="bool" value="false"/><!--配置是否倒装,true倒装-->
<param name="hostip" type="string" value="0.0.0.0"/><!--配置本机监听地址,0.0.0.0表示监听全部-->
<param name="sensorip" type="string" value="192.168.9.2"/><!--配置sensor地址-->
<param name="port" type="string" value="2368"/><!--配置本机监听端口-->
<param name="angle_offset" type="int" value="0"/><!--配置点云旋转角度,可以是负数-->
<param name="scanfreq" type="string" value="30" /><!--配置扫描频率,范围:10、20、25、30-->
<param name="filter" type="string" value="3" /><!--配置滤波选项,范围:3、2、1、0 -->
<param name="laser_enable" type="string" value="true" /><!--雷达扫描使能,范围:true、false-->
<param name="scan_range_start" type="string" value="45" /><!--雷达扫描起始角度,范围:45~315-->
<param name="scan_range_stop" type="string" value="315" /><!--雷达扫描结束角度,范围:45~315,结束角度必须大于起始角度-->
</node>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find lakibeam1)/rviz/lakibeam1_scan.rviz" />
</launch>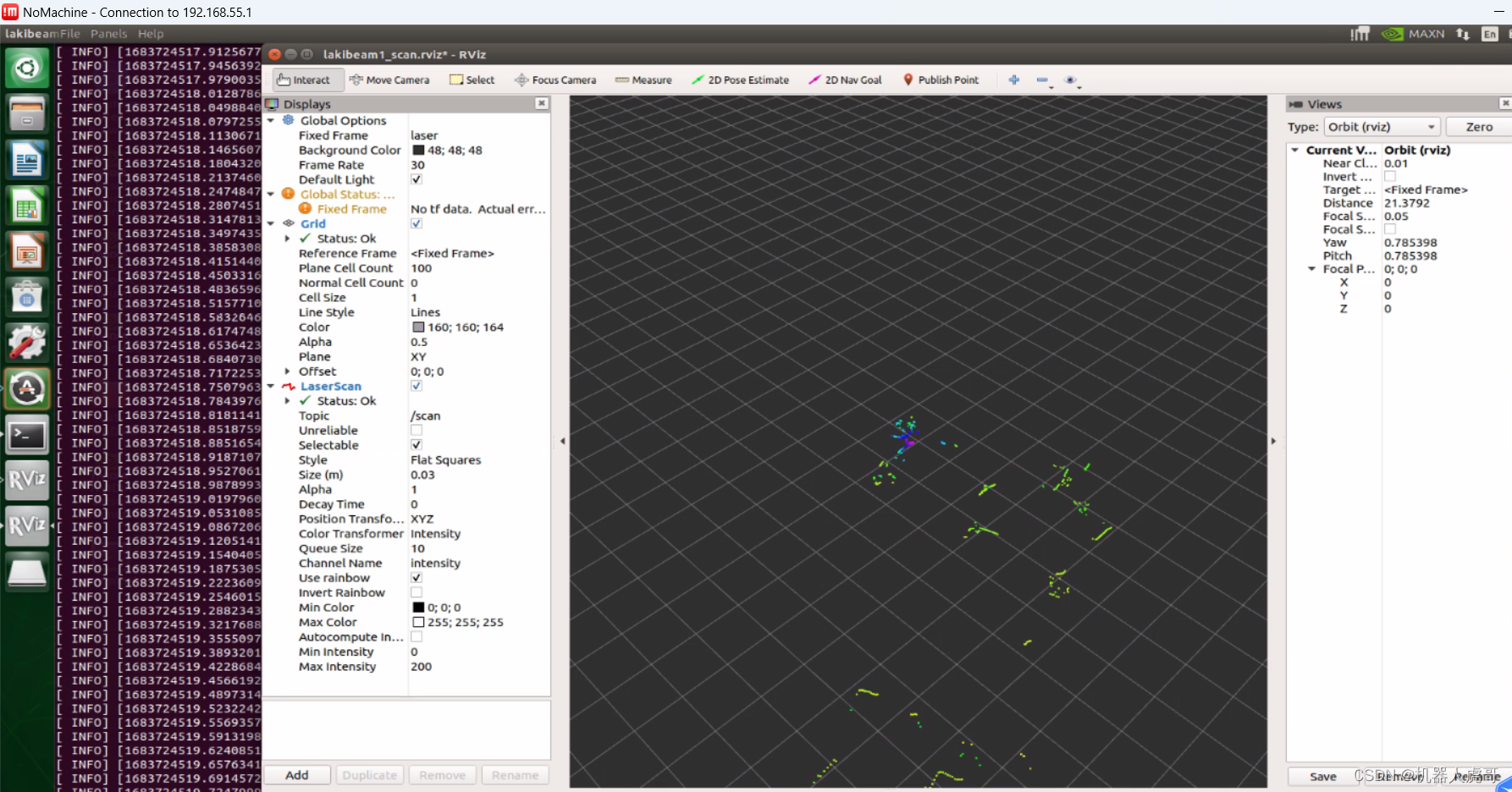
查看点云方法2:
打开一个终端,打开扫描节点,:
cd ~/LakiBeam_ws
source devel/setup.bash
#启动驱动
roslaunch lakibeam1 lakibeam1_scan.launch 我们再使用nomachine链接到桌面,然后打开终端,启动RVIZ。
我们再使用nomachine链接到桌面,然后打开终端,启动RVIZ。
rosrun rviz rviz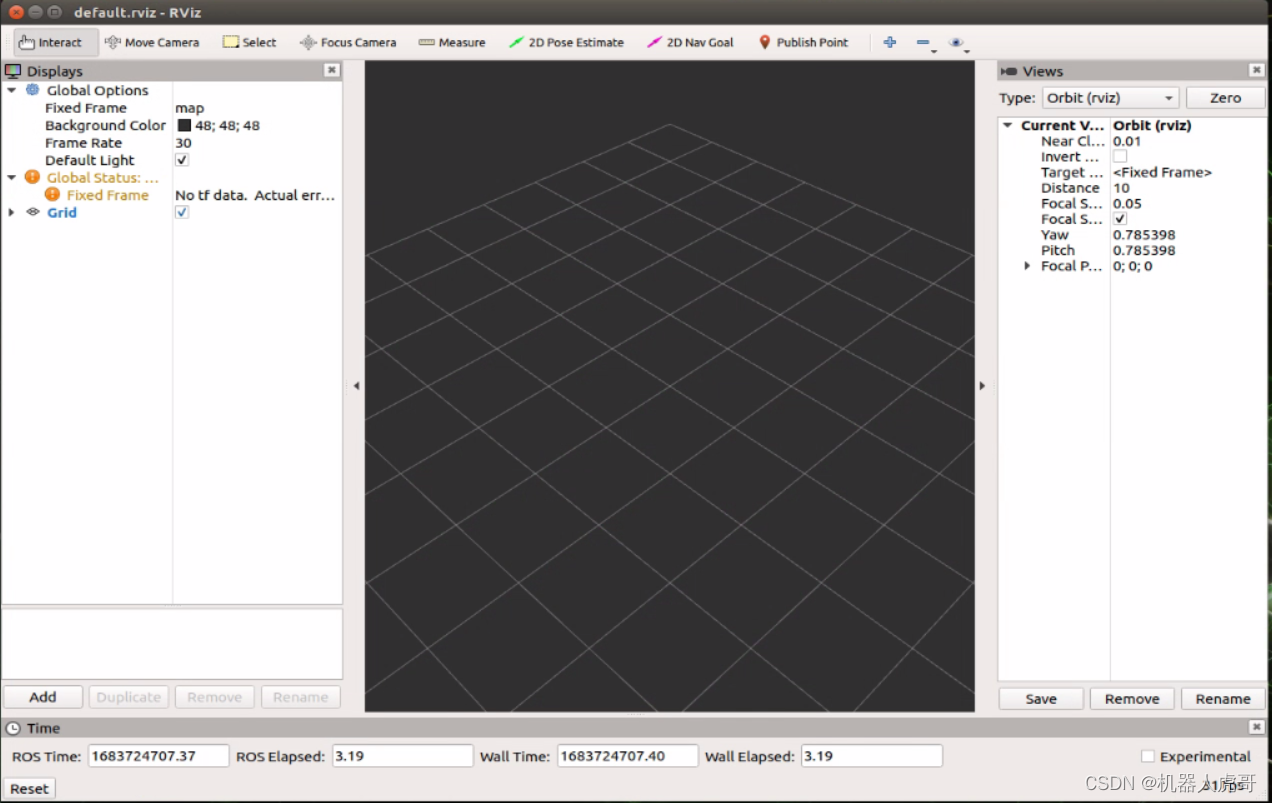
此时是一个空白的rviz,需要做一下话题配置。
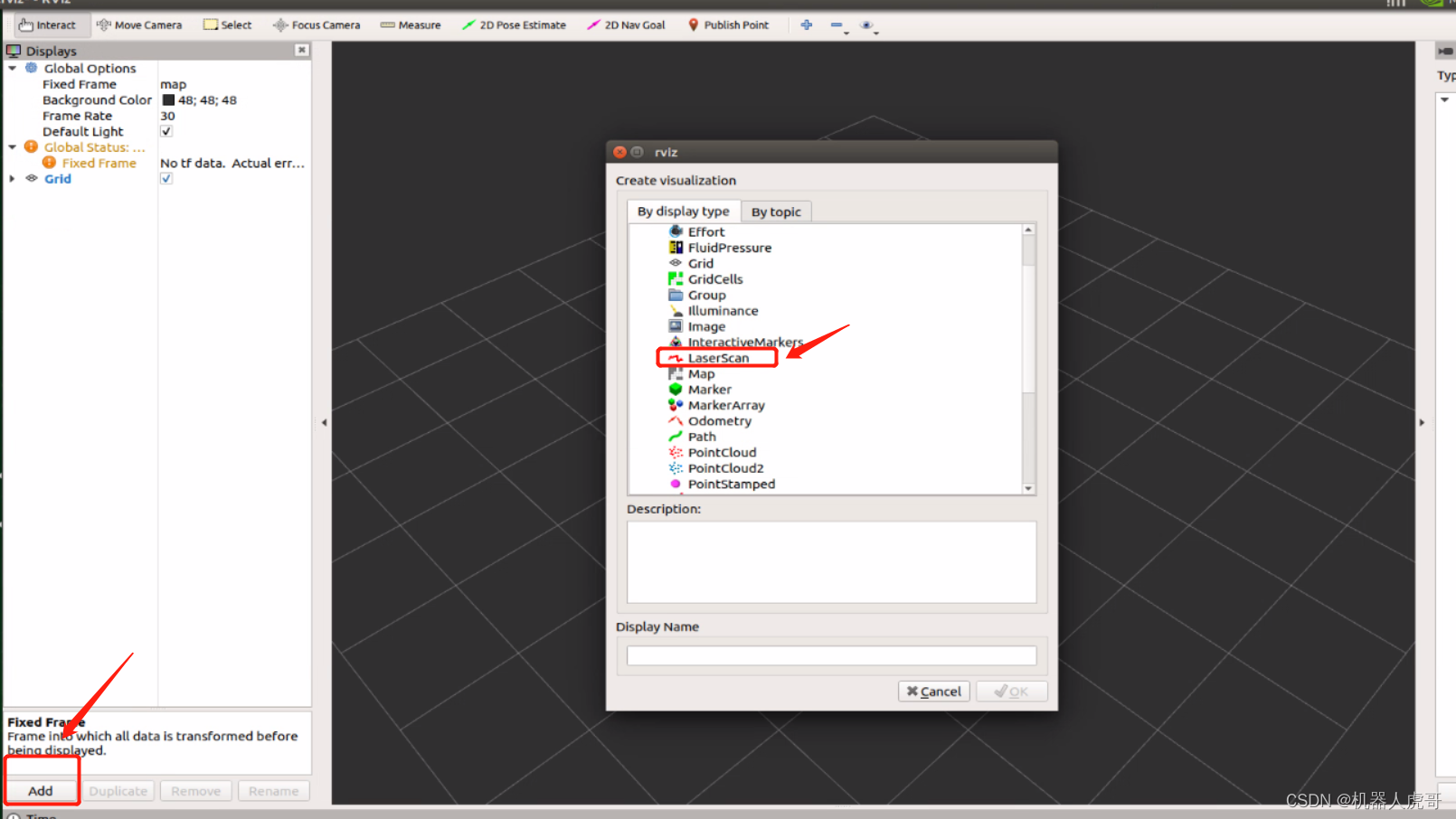
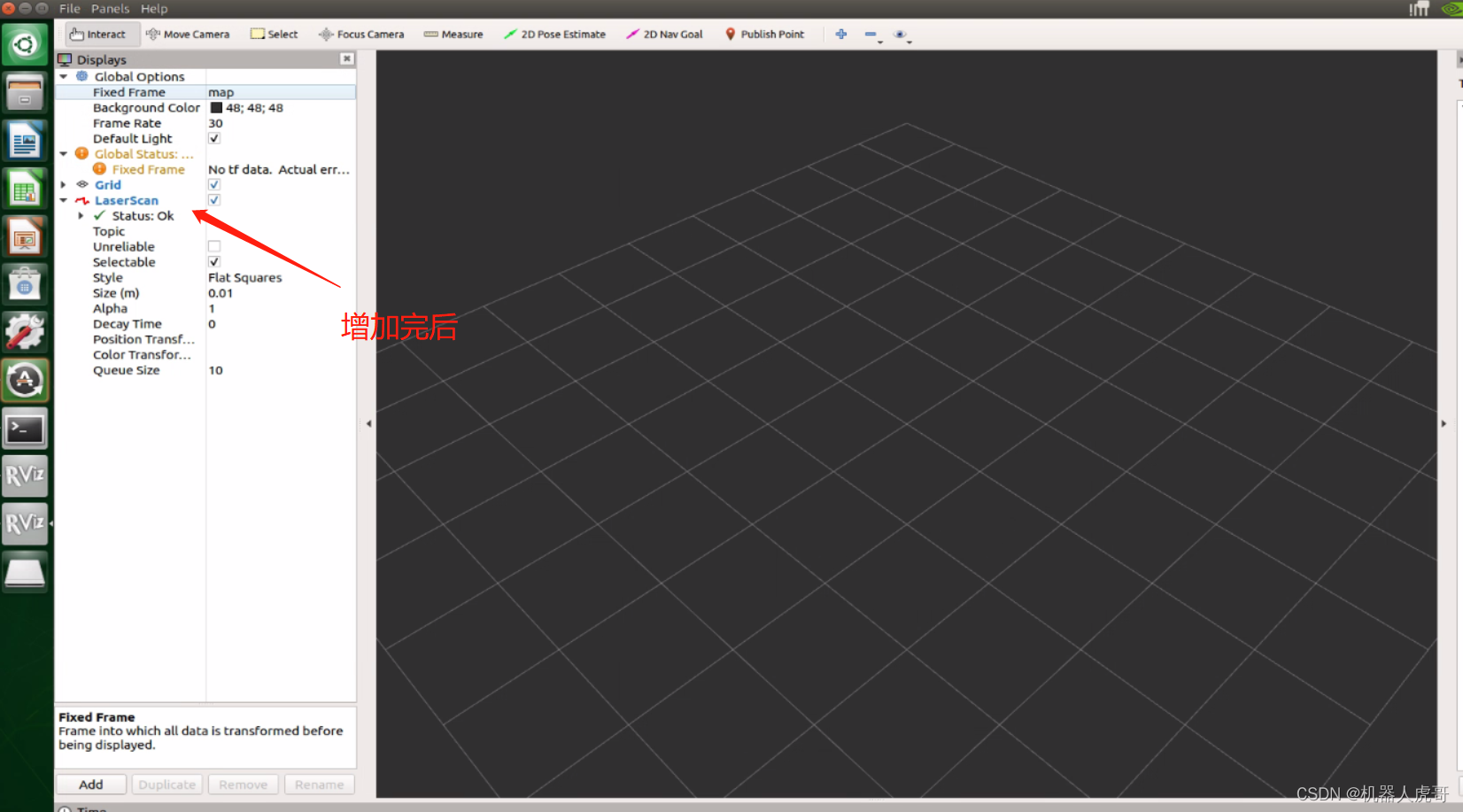
增加激光扫描插件。
修改话题。
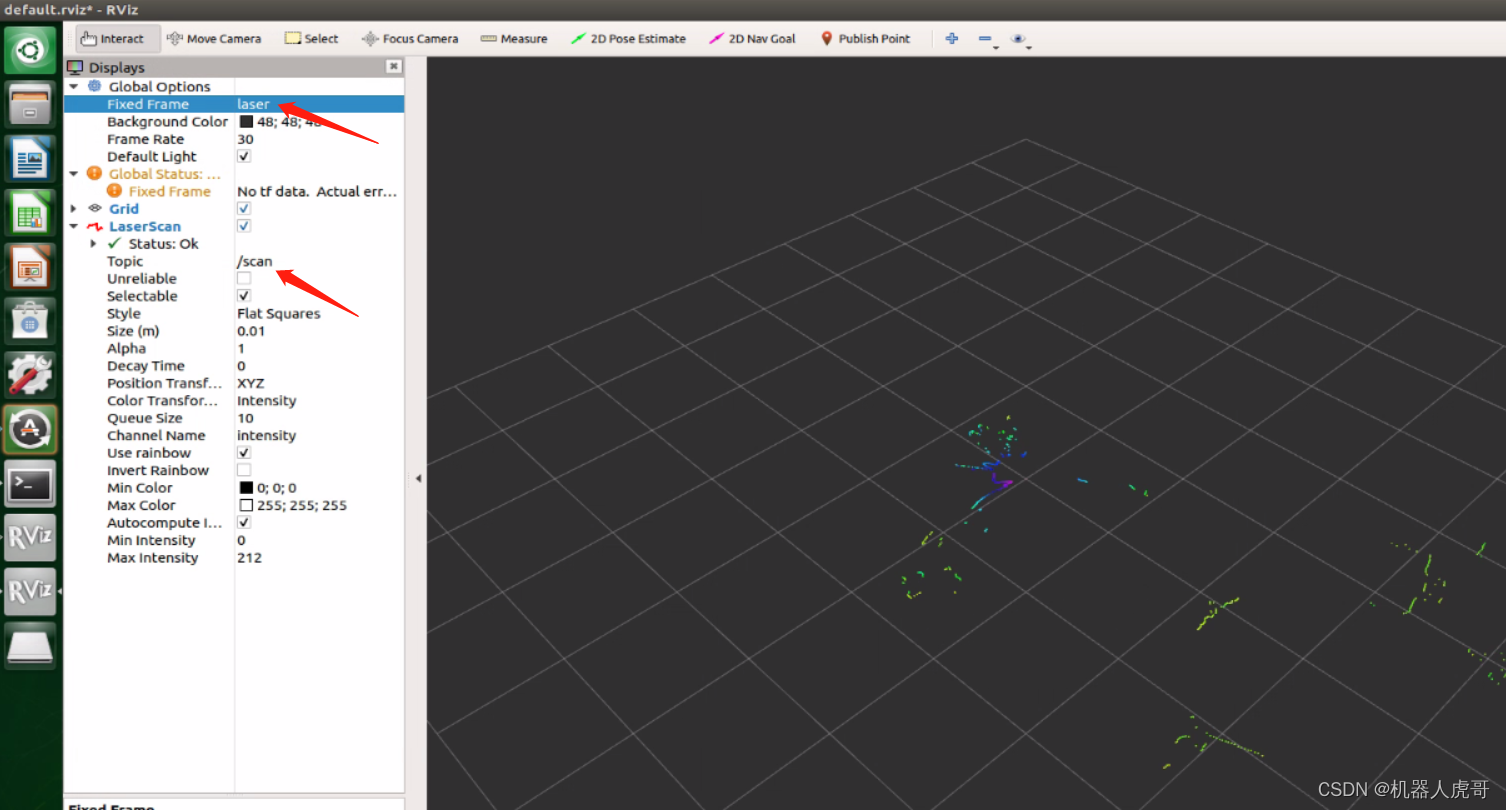
这两个地方对应改了,确定后这样就可以看到激光数据了。
纠错,疑问,交流: 911946883@qq.com

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











