






一、BehaviorTree + Groot 在ros中的运用的参考资料
1、BehaviorTree.cpp开源库
地址:github.com/BehiaviorTree/BehaviorTree.CPP
提供BehaviorTree框架,提供examples学习,但是相对比较零碎,需要对BehaviorTree有一个初步了解
2、BehaviorTree主要概念、API与教程
对开源库有一些讲解,相对清晰
3、古月居小明工坊的 《ROS实验 | 行为树实现机器人智能》
网页链接:ROS实验 | 行为树实现机器人智能 - 古月居
二、BehaviorTree + Groot 在ros中的运用基础
1、运行过程
-
一个名为“tick”的信号被发送到树的根部,并在树中传播,直到到达叶节点。
-
接收tick信号的树节点执行其callback。此回调必须返回。
SUCCESS,FAILURE or RUNNING
-
如果一个TreeNode有一个或多个子节点,它将根据其状态、外部参数或前一个同级节点的结果来顺序tick他们。
-
LeafNode,即那些没有任何子节点的TreeNode,是实际的命令,即行为树与系统其余部分交互的地方。Actions节点是最常见的叶节点类型。
2、tick的运行原理
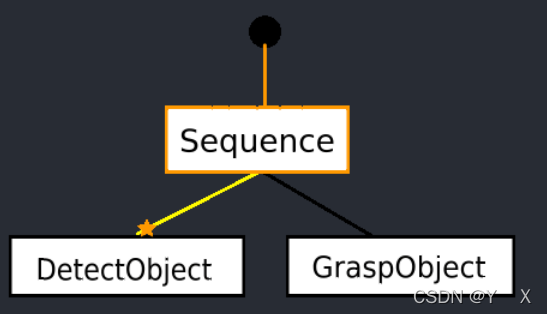
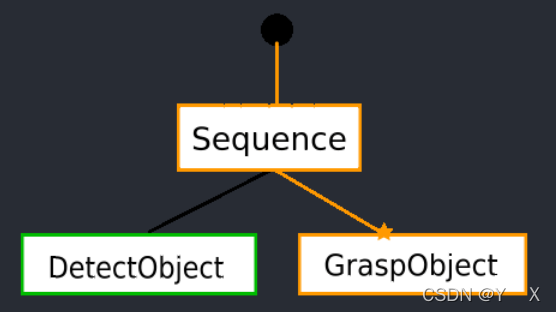
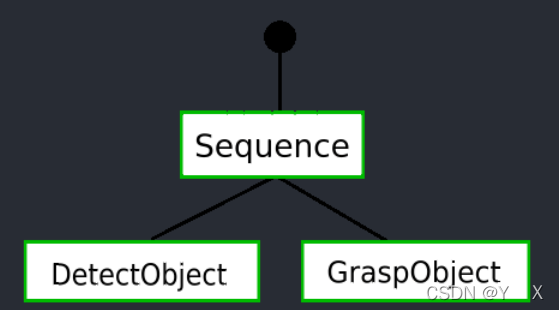
Sequence 处在运行中, tick 传到 DetectObject, 返回SUCCESS,tick传到GraspObject,返回SUCCESS,子节点全部完成,父节点Sequence状态变成SUCCESS。
其余详细资料请参考提供的参考资料
三、调试工具
1、groot
Groot是与BehaviorTree.CPP搭配使用的工具,分为Editor、Monitor、Log Replay 3种模式,具有行为树编辑、状态监控、历史log回放等功能。

指南:Groot - Interacting with Behavior Trees — Navigation 2 1.0.0 documentation
2、StdCoutLogger
作用:在终端打印行为树中的节点执行状态变化。
代码仅需在加载tree后添加StdCoutLogger类的1个实例(且只能有1个实例),运行效果如下:
StdCoutLogger logger_cout(tree);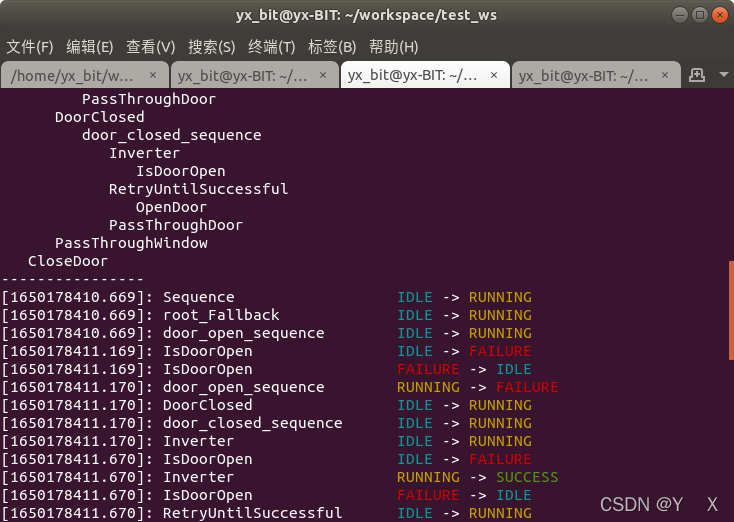
四、实践
理论的东西看起来容易,但离实践还有一定距离,接下来用一个实践小项目来对BehaviorTree + Groot + Ros进行演示,项目题目来源于古月居,实现一个巡逻的小乌龟的游戏
Groot下的行为树如下图
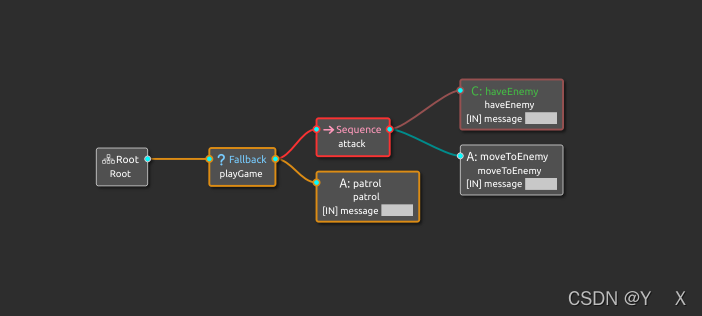
运行过程
1、attack子节点haveEnemy判断周围是否有敌人。
2、若没有敌人,Ation节点moveToEnemy将不被触发,守卫将执行patrol节点,对区域进行搜索。
3、若找到敌人,moveToEnemy节点将被触发,守卫向敌人前进。
1、小乌龟生成与tf发布
此部分不再详细描述,代码如下
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// tf广播器
static tf::TransformBroadcaster br;
// 根据乌龟当前的位姿,设置相对于世界坐标系的坐标变换
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 发布坐标变换
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化节点
ros::init(argc, argv, "my_tf_broadcaster");
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
};
turtle_name = argv[1];
// 订阅乌龟的pose信息
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
ros::spin();
return 0;
};void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// tf广播器
static tf::TransformBroadcaster br;
// 根据乌龟当前的位姿,设置相对于世界坐标系的坐标变换
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 发布坐标变换
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
// 发布固定点坐标
tf::Transform transform_a;
transform_a.setOrigin(tf::Vector3(1.0, 6.0, 0.0));
tf::Quaternion q_a;
q_a.setRPY(0.0, 0.0, 0.0);
transform_a.setRotation(q_a);
br.sendTransform(tf::StampedTransform(transform_a, ros::Time::now(), "world", "point_a"));
tf::Transform transform_b;
transform_b.setOrigin(tf::Vector3(10.0, 6.0, 0.0));
tf::Quaternion q_b;
q_b.setRPY(0.0, 0.0, 0.0);
transform_b.setRotation(q_b);
br.sendTransform(tf::StampedTransform(transform_b, ros::Time::now(), "world", "point_b"));
}
int main(int argc, char** argv)
{
// 初始化节点
ros::init(argc, argv, "my_tf_broadcaster");
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
};
turtle_name = argv[1];
// 订阅乌龟的pose信息
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 通过服务调用,产生第二只乌龟turtle2
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle =
node.serviceClient<turtlesim::Spawn>("spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
ros::spin();
return 0;
};2、Action节点构建
节点构建以静态库的方式进行构建,构建的类需要对behaviorTree的类进行继承,巡逻节点类构建如下
class BTActionPatrol : public BT::AsyncActionNode
{
protected:
ros::NodeHandle nh_;
// 定义turtle2的速度控制发布器
ros::Publisher turtle_vel =
nh_.advertise<geometry_msgs::Twist>("turtle2/cmd_vel", 10);
public:
BTActionPatrol(const std::string& name, const BT::NodeConfiguration& config)
:BT:: AsyncActionNode(name, config)
{
}
~BTActionPatrol(void)
{}
BT::NodeStatus tick() override;
static BT::PortsList providedPorts()
{
return{ BT::InputPort<std::string>("message") };
}
virtual void halt() override;
};publisher与providedPorts定义本不应该放头文件里面。
在构建节点时需要注意重写 tick 与 halt函数,需要提供static BT::PortsList providedPorts接口函数
重写的tick函数如下,主要操作在这里实现。
BT::NodeStatus BTActionPatrol::tick()
{
tf::TransformListener listener;
tf::StampedTransform transform_a, transform_b, transform;
// 查找坐标变换
listener.waitForTransform("/turtle2", "/point_a", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/point_a", ros::Time(0), transform_a);
listener.waitForTransform("/turtle2", "/point_b", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/point_b", ros::Time(0), transform_b);
double distance_a, distance_b;
distance_a = sqrt(pow(transform_a.getOrigin().x(), 2) + pow(transform_a.getOrigin().y(), 2));
distance_b = sqrt(pow(transform_b.getOrigin().x(), 2) + pow(transform_b.getOrigin().y(), 2));
if (nh_.hasParam("/goal_point")){
if(distance_a < 0.5) {
nh_.setParam("/goal_point", "b");
ROS_INFO("Change direction to b");
}
else if(distance_b < 0.5){
nh_.setParam("/goal_point", "a");
ROS_INFO("Change direction to b");
}
}
else{
nh_.setParam("/goal_point", "a");
}
std::string direction;
nh_.getParam("/goal_point", direction);
if(direction == "a"){
ROS_INFO("Nav to a");
transform = transform_a;
}
else if(direction == "b"){
ROS_INFO("Nav to b");
transform = transform_b;
}
// 根据turtle1和turtle2之间的坐标变换,计算turtle2需要运动的线速度和角速度
// 并发布速度控制指令,使turtle2向turtle1移动
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 1.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
// vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
// pow(transform.getOrigin().y(), 2));
vel_msg.linear.x = 0.8;
turtle_vel.publish(vel_msg);
ROS_INFO("Action nav_b is successful!");
return BT::NodeStatus::SUCCESS;
}moveToEnemy节点与上一节点一样,继承Action类,判断是否有enemy的节点为条件节点,继承Condition类,详细代码将不在此处详写。
3、构建树
使用xml文件构建行为树,代码如下
<root main_tree_to_execute = "DoorClosed">
<BehaviorTree ID="DoorClosed">
<Fallback name="playGame">
<Sequence name="attack">
<haveEnemy/>
<moveToEnemy/>
</Sequence>
<patrol/>
</Fallback>
</BehaviorTree>
</root>载入节点
BehaviorTreeFactory factory;
factory.registerNodeType<BTActionNav>("moveToEnemy");
factory.registerNodeType<BTActionPatrol>("patrol");
factory.registerNodeType<BTActionHaveEnemy>("haveEnemy");
auto tree = factory.createTreeFromText(xml_text);添加Groot调试
PublisherZMQ publisher_zmq(tree);
4、修改CmakeLists
构建静态库
add_library(sample_nodes STATIC
src/treeNode/action_nav_enemy.cpp
src/treeNode/action_patrol.cpp
src/treeNode/condition_have_enemy.cpp
)
target_link_libraries(sample_nodes
${catkin_LIBRARIES}
BT::behaviortree_cpp_v3)添加可执行文件
add_executable(guard_robot_tree src/tree/guard_robot_tree.cpp)
target_link_libraries(
guard_robot_tree
${catkin_LIBRARIES}
BT::behaviortree_cpp_v3
sample_nodes
# /opt/ros/melodic/lib/librosconsole.so
# /opt/ros/melodic/lib/libroscpp_serialization.so
)
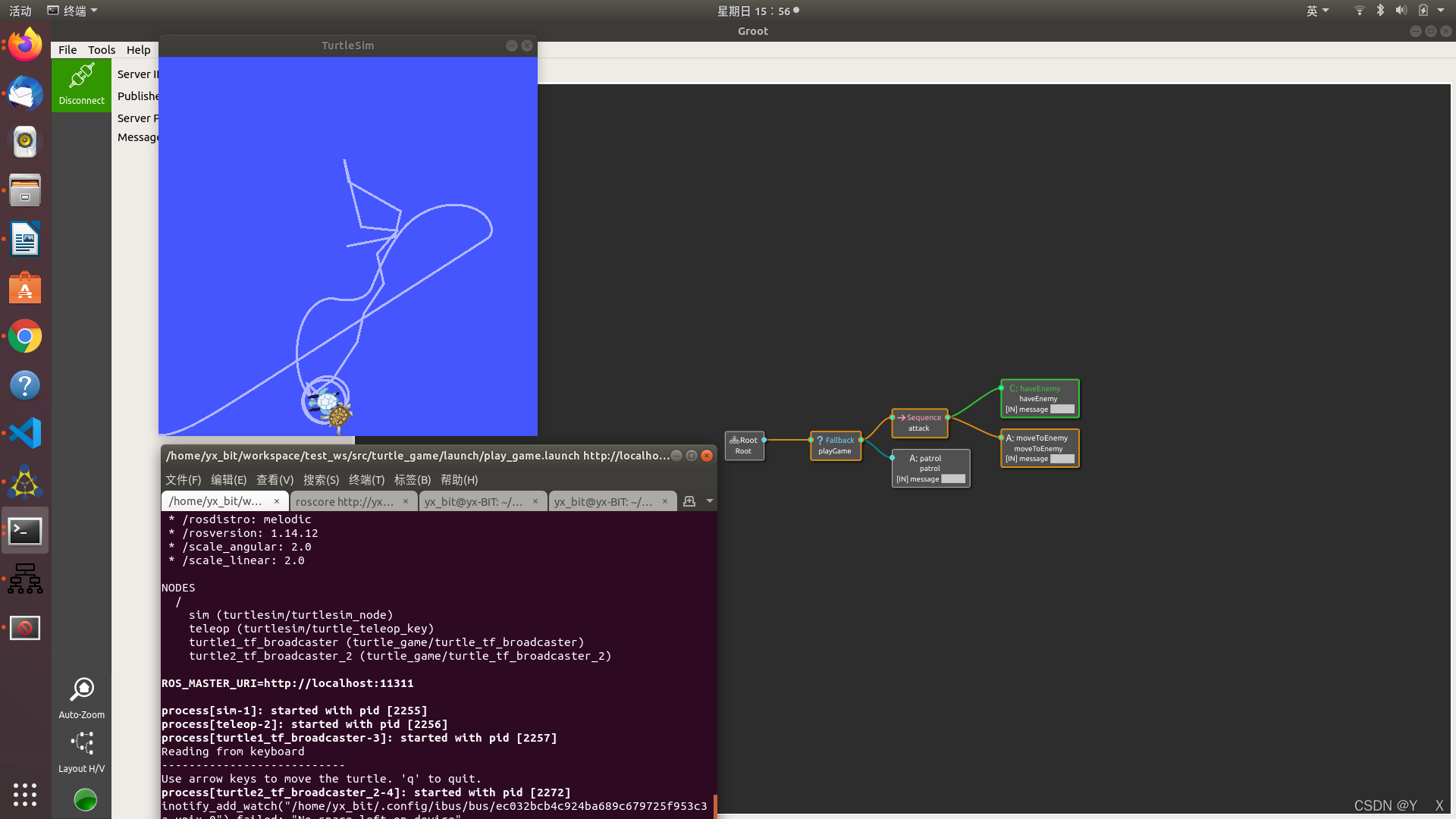
5、运行效果
五、总结
对BehaviorTree进行了学习,还有很多功能有待开发,如节点间的通讯,由可以使用ros话题通讯代替,暂时不需要,后续有新内容还会进行更新,对于文章中的错误希望大家一起讨论。
六、参考

















 3724
3724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









