







计算机图形学中,实时阴影分两类:Shadow Volume和 Shadow Maps。其本质为找到屏幕中未被光源照射到的象素,在绘制光照物体时,忽略这些象素。阴影的要素由光源,遮挡物与接受物组成。遮挡物也是阴影接受物之一。
阴影与阴影空间的形成: 以光源为中心(或为方向),凡是被遮挡物表面遮挡掉的空间,都处于阴影之下。在没有接受物时,此空间分为两个部分。光照空间和阴影空间。阴影空间为:光源与遮挡物面向光源轮廓形成的不规则无限大的锥。 此时,阴影只存在于遮挡物本身的背光面上。当此空间中有分离的第三个物体,且有部分处于阴影空间中时,第三个物体成为阴影接受物,其面向光源表面会有遮挡物的影子。同时其本身也是遮挡物。
屏幕空间阴影:共同的想法都是力图在已光栅化物体的屏幕DEPTH BUFFER中,用某种光线与遮挡物之间关系形成的光栅图形象素,与此象素所在位置的深度值做比较。从而判断出此象素是否处于阴影空间中。
Shadow Volume(阴影体)就是此处定义的阴影空间。阴影体由从光源到面向光源遮挡物轮廓边组成的若干三角面组成。还需要加上遮挡物面向光源的所有三角形。它是阴影体的盖子。Shadow Volume绘制的目标,就是判断一个物体,是否处于阴影空间之中。把物体所有位于阴影体的象素都标记出来。不被渲染。
由于无限远投影VOLUME,和VOLUME CAP以及Z-FAILED的结合使用,改进了VOLUME的近截面穿透,镜头在VOLUME内正确阴影绘制等硬伤,已经趋于成熟。
在控制填充率方面的加速有:
double surface stencil rendering:由硬件一次性绘制完STENCIL BUFFER里的锥;否则要分里外面分别渲染两次。
depth range culling:由硬件检测深度范围内才进行STENCIL的操作。
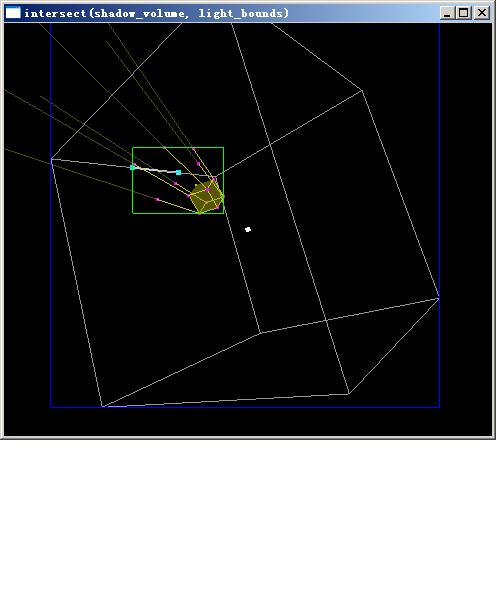
volume culling:图中白点是光源,白盒子是光源AABB,蓝色是SCREEN SPACE的AABB。黄色是遮挡物。可以看到阴影体与光源AABB相交的点在SCREEN SPACE中构成了绿色的AABB。这才是真正需要进行STENCIL 操作的地方。使用SISSOR TEST进行优化。
几何方面的优化:
aotu gen volume in vertex shader :使用VERTEX SHADER直接在显卡内生成VOLUME三角形
非封闭网格volume generation:非封闭网格的volume如今也可以解决了。
静态预计算volume: 没啥说的,相对不动的光和遮挡物结队就先把volume算出来存着了。
Shadow Volume对于遮挡物几何拓扑关系信息的要求,是此方法最大弊病。无论skin还是变形mesh,甚至只要物体或灯一动,都必须重新背面剔除着寻找轮廓,重新生成volume三角形等等繁重几何体力劳动。由于算法所注定,用volume者,身心具勤也....
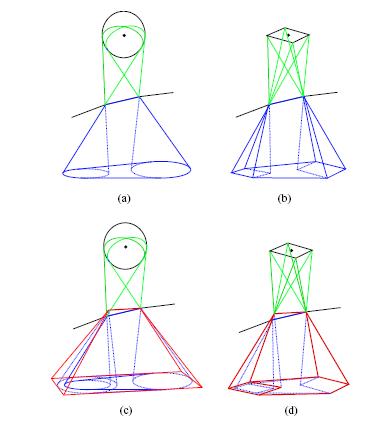
Soft Shadow Volume: 软阴影方面,利用volume的几何属性,可以根据面光源大小,真的切出些模仿半影空间来。来看看画条轮廓边的阴影如何做:
多的就不记录了。一般来讲,太复杂的算法,除非硬件真死命支持,否则生命力很难说。。。
Shadow Maps, 顾名思义,就是阴影图。其本质定义,应该叫Depth Maps(深度图)。记录了遮挡物表面象素到光源的距离。实际SHADOWMAPS就是做了个判断,在光源投影坐标系里(就是把相机屏幕摆到光源前,观察点就在光源),遮挡物和接受物都投影在光源透视平面(相机屏幕)。两物体在屏幕上会有重合的点,比较这两个点的实际位置离光源哪个更远。再概括讲,就是判断从光源射出的光线,是先遇到了遮挡物,还是先遇到了接受物。如果先遇到遮挡物,那么这条光线延伸线的地方如果有接受物,则接受物这个地方就在阴影下。
SHADOWMAP的变形改进算法,主要致力于解决走样问题。有限空间,SHADOWMAP一般也就512X512。
透视SHADOWMPA,著名的PSM,它本身瑕疵多多,限制很大。难为被咬牙切齿的咒骂为骗局。确实光PSM在游戏实用工程上还是比较难。但其创造性的打开一个局面,即,shadowmaps不光只可以和视觉透视一样采用正常透视绘制,也可以无所不用其极的变形绘制shadowmaps的空间。也就有了后来的梯形shadow maps,光源空间透视shadow mpas,对数shadow maps等方法.甚至还引发了irregular shadow maps等奇思怪想。发明一种新光栅化方法,加速shadow maps...有这功夫,还不如发明一种自动64X64采样的柔化shadow maps功能,或者自动shadow cubemaps,把点光源的shadow maps自动化。
因为Perspective shadow maps,Light-space perspective shadow,Trapezoidal shadow maps,Practical Logarithmic Shadow Maps的思路都大体一样,所以查一篇就清楚一大片。不多说。
切分shadow maps,想法也很直接,既然一个shadowmap分辨率有限,就想办法按照空间(Z)多分出几块来,每个部分用不同分辨率的画。类似Adaptive shadow maps,Plural sunlight buffers,Tiled shadow maps。
变形+切分:Dual paraboloid类似环境贴图,但这回是把周围360球型世界映射到双抛物面上。PSM with cube maps可以模拟点光源的阴影。点光源是shadowmaps的死穴。犹如shadow volume的几何密集劳动...把周围场景分6次绘制进一个CUBE MAP。。。听着就很辛苦...
本文来自CSDN博客,转载请标明出处:http://blog.csdn.net/puzzy3d/archive/2006/08/17/1076599.aspx















 81
81

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









