







 本文详细介绍了机械臂的运动学概念,包括运动学与动力学的区别,以及机械臂的结构与描述方式。重点讲解了DH参数(Denavit-Hartenberg)法,用于建立杆件间的坐标转换关系,并通过具体示例展示了如何运用DH参数进行坐标变换,以确定末端执行器在不同坐标系下的位置。此外,还提到了顺向和逆向运动学在实际应用中的意义。
本文详细介绍了机械臂的运动学概念,包括运动学与动力学的区别,以及机械臂的结构与描述方式。重点讲解了DH参数(Denavit-Hartenberg)法,用于建立杆件间的坐标转换关系,并通过具体示例展示了如何运用DH参数进行坐标变换,以确定末端执行器在不同坐标系下的位置。此外,还提到了顺向和逆向运动学在实际应用中的意义。
PS: 本篇文章为台大机器人学学习笔记,B站视频链接如下:
https://www.bilibili.com/video/BV1v4411H7ez?p=7
0. 引言
- 运动学:关于运动状态本身,不讨论到力,关于位置、速度、加速度、时间等的关系。
- 动力学:力/力矩如何产生运动
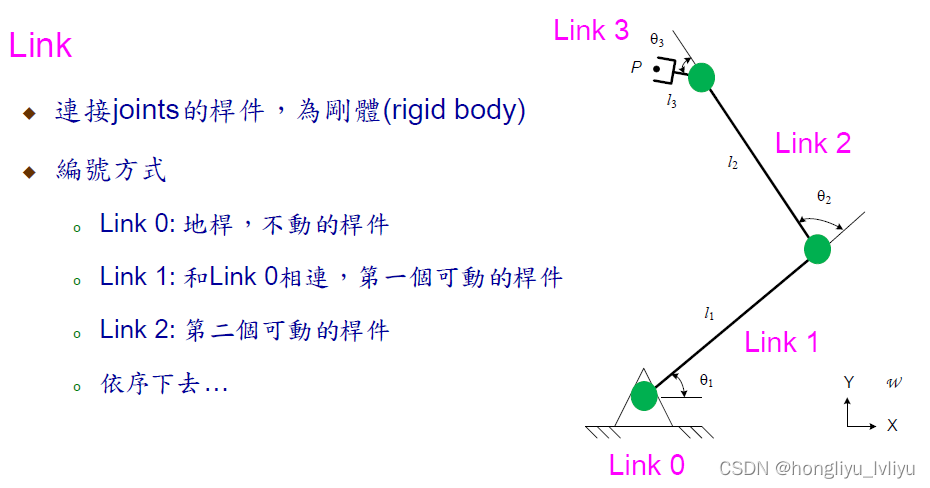
- 机械臂:
多个杆件(link)相串联,杆件间可以相对运动或者转动,由制动器驱动完成
对应关系描述:描述臂的末端点状态(位置,速度…)
连接方式: W P = f ( θ 1 , θ 2 , . . . , θ n ) {}^{W}P=f(\theta_{1},\theta_{2},...,\theta_{n}) WP=f(θ1,θ2,...,θn)
描述方法:找出各个杆件间的相对几何状态,在各个杆件上建立frame,以其状态来表述
1. 机械臂描述方式
-
关节(joint):
每个关节具有1自由度,每个关节绕着特定的轴(axis)进行转动或者移动 -
杆件(link): 连接关节
-
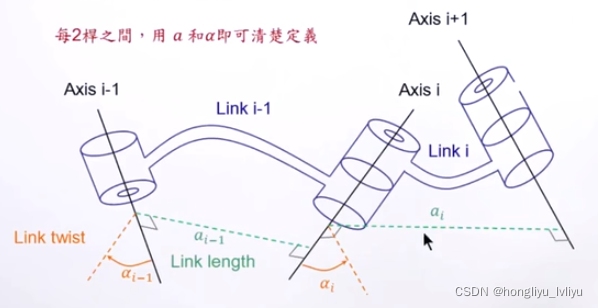
两个关节间描述:
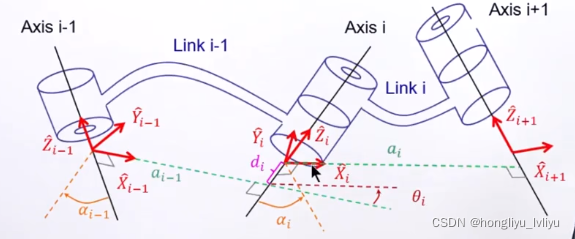
对于每个关节与其连接的杆件,可以其连接方向进行连续的定义,例如图中标号 i − 1 i-1 i−1的关节与杆件以及标号为 i i i的;每个关节对应的转轴可以为任意方向:
① 两个转轴之间有一线段( a i − 1 a_{i-1} ai−1)与两个转轴都垂直;
② 还需要一个角度来描述转轴之间的转动关系( α i − 1 \alpha_{i-1} αi−1)
每两个杆之间,用 a , α a,\alpha a,α即可定义
-
多个关节间描述:
如果需要多杆串联,则还需要另外两个参数来描述相邻线段 a i − 1 a_{i-1} ai−1与 a a a之间的相对几何关系
① 轴垂直线段 a i − 1 a_{i-1} ai−1与 a a a之间的相对距离: d i d_{i} di
② 轴垂直线段 a i − 1 a_{i-1} ai−1与 a a a之间的转角关系: θ i \theta_{i} θi
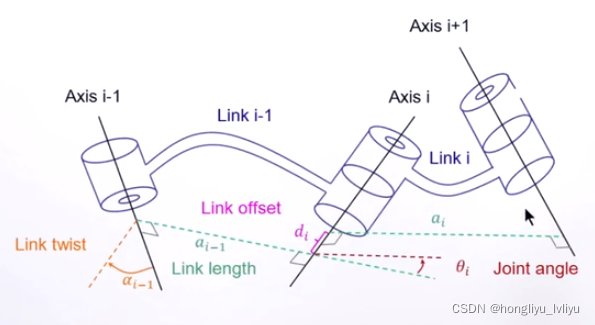
–> 针对每个杆件,需要四个参数描述其状态: ( α i , a i , d i , θ i ) (\alpha_{i},a_{i},d_{i},\theta_{i}) (αi,ai,di,θi)
根据轴的功能不同,移动与转动的轴,够各自只有一个参数在变化:
以axis i 为例:
| 转动 | 移动 |
|---|---|
| θ i \theta_{i} θi变化,其它参数固定 | d i d_{i} di变化,其它参数固定 |
2. DH表达法(denavit-hartenberg)
- 如何在杆件上建立坐标系:
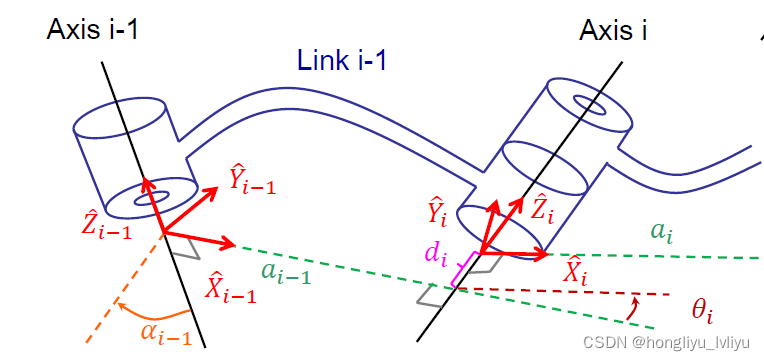
| Z ^ i \hat{Z}_{i} Z^i | X ^ i \hat{X}_{i} X^i | Y ^ i \hat{Y}_{i} Y^i |
|---|---|---|
| 转动/移动关节的转轴方向 | 当 a i a_{i} ai≠0:沿着 a i a_{i} ai的方向 | 遵循右手定则,与 Z ^ i \hat{Z}_{i} Z^i 和 X ^ i \hat{X}_{i} X^i两者垂直 |
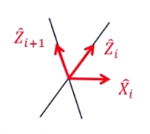
| a i = 0 a_{i}=0 ai=0(即 Z ^ i \hat{Z}_{i} Z^i 与 Z ^ i + 1 \hat{Z}_{i+1} Z^i+1 相交):则取 X ^ i \hat{X}_{i} X^i 与 Z ^ i \hat{Z}_{i} Z^i 和 Z ^ i + 1 \hat{Z}_{i+1} Z^i+1两者垂直(如下图) |
- 地杆(第0杆)的特别表述:
由于link(0)固定,条件相对少,较为特殊,对于link(0)可以有特别的表述方式
令frame(0) 与 frame(1)重合:
| α 0 \alpha_{0} α0 | a 0 a_{0} a0 | d 1 d_{1} d1 | θ 1 \theta_{1} θ1 | |
|---|---|---|---|---|
| 转动 | 0(令frame(0) 与 frame(1)重合) | 0(令frame(0) 与 frame(1)重合) | 0 | 任意 |
| 移动 | 0(令frame(0) 与 frame(1)重合) | 0(令frame(0) 与 frame(1)重合) | 任意 | 0 |
- 任意杆件link(n)的表述:

取与
X
^
n
−
1
\hat{X}_{n-1}
X^n−1同方向:
| α n \alpha_{n} αn | a n a_{n} an | d n d_{n} dn | θ n \theta_{n} θn | |
|---|---|---|---|---|
| 转动 | 0 | 0 | 0 | 任意 |
| 移动 | 0 | 0 | 任意 | 0 |
- DH表达法(denavit-hartenberg)
统一规律(注意下标):
| α i − 1 \alpha_{i-1} αi−1 | a i − 1 a_{i-1} ai−1 | d i d_{i} di | θ i \theta_{i} θi | |
|---|---|---|---|---|
| 方向 | 以 Z ^ i − 1 \hat{Z}_{i-1} Z^i−1方向看 | 沿 X ^ i − 1 \hat{X}_{i-1} X^i−1方向 | 以 Z ^ i − 1 \hat{Z}_{i-1} Z^i−1方向看 | 沿着 Z ^ i − 1 \hat{Z}_{i-1} Z^i−1方向 |
| 含义 | Z ^ i − 1 \hat{Z}_{i-1} Z^i−1与 Z ^ i \hat{Z}_{i} Z^i夹角 | Z ^ i − 1 \hat{Z}_{i-1} Z^i−1与 Z ^ i − 1 \hat{Z}_{i-1} Z^i−1间的距离( a i > 0 a_{i}>0 ai>0) | X ^ i − 1 \hat{X}_{i-1} X^i−1和 X ^ i \hat{X}_{i} X^i夹角 | X ^ i − 1 \hat{X}_{i-1} X^i−1和 X ^ i − 1 \hat{X}_{i-1} X^i−1间的距离 |
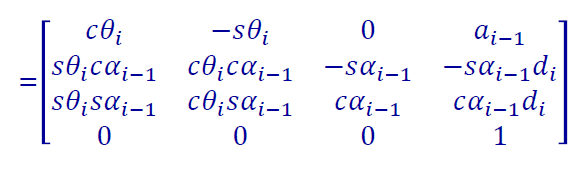
3. 杆件的坐标转换
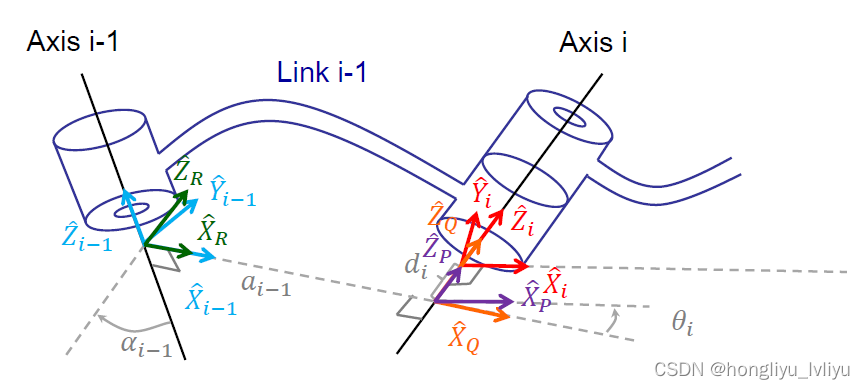
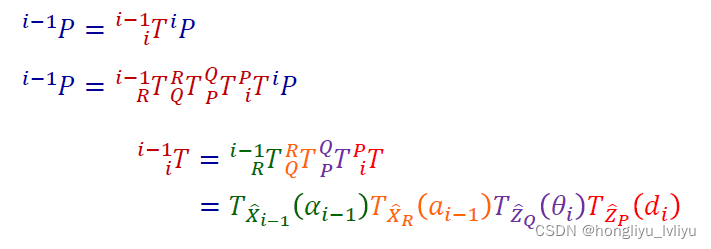
根据转轴间由四个参数来表达的特点,分成四步进行转换,得到:
i
i
−
1
T
=
T
X
^
i
−
1
(
α
i
−
1
)
T
X
^
R
(
a
i
−
1
)
T
Z
^
Q
(
θ
i
)
T
Z
^
P
(
d
i
)
{}^{i-1}_{i}T=T_{\hat{X}_{i-1}}(\alpha_{i-1})T_{\hat{X}_{R}}(a_{i-1})T_{\hat{Z}_{Q}}(\theta_{i})T_{\hat{Z}_{P}}(d_{i})
ii−1T=TX^i−1(αi−1)TX^R(ai−1)TZ^Q(θi)TZ^P(di)
- 对于连续的link,有:
n
0
T
=
1
0
T
2
1
T
.
.
.
n
−
1
n
−
2
T
n
n
−
1
T
{}^{0}_{n}T ={}^{0}_{1}T{}^{1}_{2}T...{}^{n-2}_{n-1}T{}^{n-1}_{n}T
n0T=10T21T...n−1n−2Tnn−1T
frame{n} 相对于 frame{n} 的空间几何关系可以清晰表达;
在 frame{n} 下表达的向量,可以转回 frame{0} 下进行表达。
- 示例1:
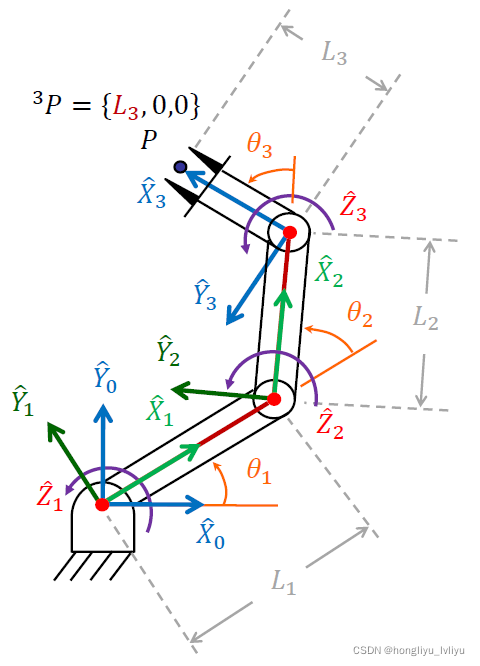
Z Z Z轴为转轴方向(垂直与纸面);
X X X轴为与两个转轴垂直的一线段方向;
Y Y Y轴根据 Z 、 X Z、X Z、X轴右手定则确定;
对于 frame{0}:
选择坐标系与 frame{1} 重合,但取
θ
0
=
0
\theta_{0}=0
θ0=0,在 frame{1} 转动角度为0时,frame{1} 与 frame{0} 重合。
对于 frame{3}( frame{n}):
也选择杆件的方向,在
θ
3
=
0
\theta_{3}=0
θ3=0时,与杆件2 方向重合。
四个参数列表如下:
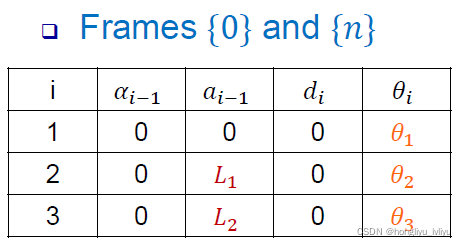
由于在此范例中,转轴都是相互平行,垂直于纸面的,因此多数参数为0.
机械臂末端点
P
P
P 在frame{3} 下的坐标为:
3
P
=
{
L
3
,
0
,
0
}
{}^{3}P=\{L_{3},0,0\}
3P={L3,0,0}
如果想知道末端点
P
P
P 在frame{0} 下(相对地面)的坐标则可以进一步进行转化。
- 示例2:
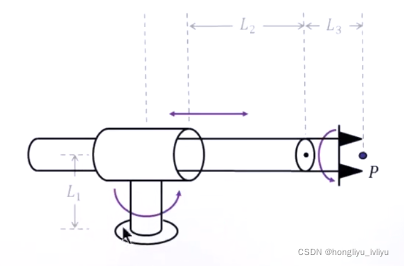
分析流程:
① 分析转动移动,找到转轴方向
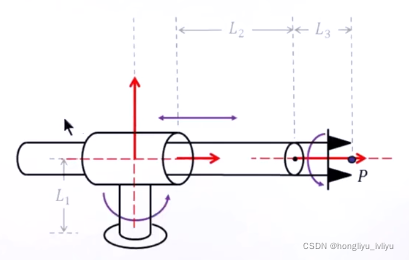
1转动,2移动,3转动
② 找与两两转轴向垂直的线段
a
a
a
转轴1、2垂直相交,线段a即为两转轴的交点;
转轴2、3重合,也以一点作为基准。
③ 按照方法建立各个转轴(先不定义地杆与最后一杆)的坐标系
其中
X
^
1
,
X
^
2
\hat{X}_{1},\hat{X}_{2}
X^1,X^2定义为往前或往后都可以
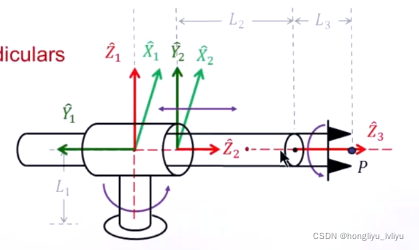
④ 建立frame(0) , frame(n) 的坐标系
frame(0) 与frame(1) 重合且选择
θ
=
0
\theta=0
θ=0的位置
frame(3) (即frame(n))选择相对于frame(2) 角度为0的时候
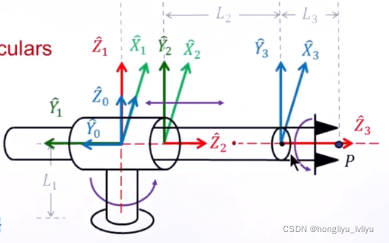
⑤ 可以列出各个坐标系之间的四个参数关系
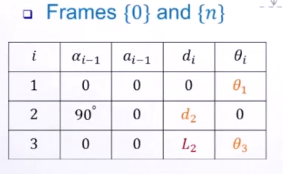
其中90°为
Z
^
1
\hat{Z}_{1}
Z^1转到
Z
^
2
\hat{Z}_{2}
Z^2;
a
a
a都为0:根据②中的分析,转轴都重合在某点,所以都为0;
d
d
d根据图示,可以看出坐标系之间转轴的距离;
⑥ 机械臂末端分析
P
P
P点对于frame{3}来说,其坐标为:
3
P
=
{
0
,
0
,
L
3
}
{}^{3}P=\{0,0,L_{3}\}
3P={0,0,L3}
可以通过转换将
P
P
P点坐标转换到frame{0}
- PS:对于转轴相交时的讨论:
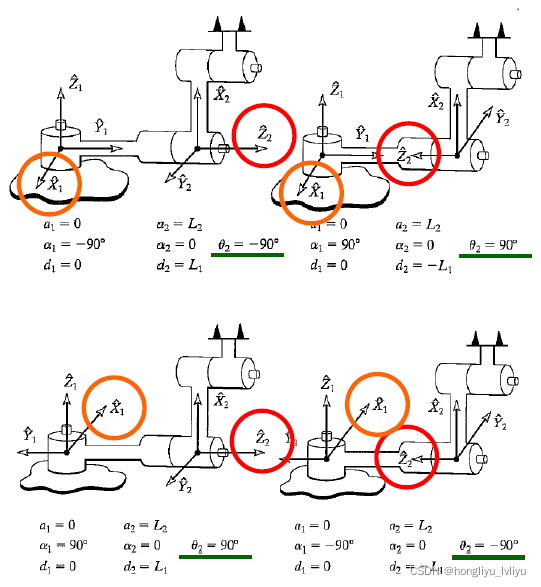
当 Z ^ 1 \hat{Z}_{1} Z^1与 Z ^ 2 \hat{Z}_{2} Z^2相交时, Z ^ 2 \hat{Z}_{2} Z^2的方向有两个选择, X ^ 1 \hat{X}_{1} X^1的方向有两个选择。
4. 坐标系转换
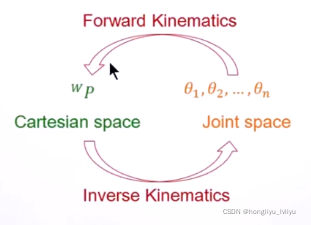
顺向运动学:
即先找到各个关节之间的关系,再得到末端与机械臂之间的关系(由
θ
\theta
θ到
W
P
{}^{W}P
WP)。
逆向运动学:
先知道末端在世界坐标系下的表达,再得到各个关节的关系。
cartesian space:
末端点在世界坐标系下的表达
joint space:
关节坐标系下的表达
actuator space:
在某些情况下,关节的表达与执行机构相关

















 1646
1646

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









