







 单元分解法【CellDecomposition】是一种在位形空间中处理多边形障碍物的路径规划策略。它将自由空间划分为简单的凸形状(如梯形或三角形)区域,形成辅助图,节点表示区域,边表示相邻关系。通过找到起点和目标点所在区域的路径,可以规划出机器人在这些安全区域内的直线运动。这种方法在二维空间中尤其有效,简化了路径规划问题。
单元分解法【CellDecomposition】是一种在位形空间中处理多边形障碍物的路径规划策略。它将自由空间划分为简单的凸形状(如梯形或三角形)区域,形成辅助图,节点表示区域,边表示相邻关系。通过找到起点和目标点所在区域的路径,可以规划出机器人在这些安全区域内的直线运动。这种方法在二维空间中尤其有效,简化了路径规划问题。
路径规划的另一个思路被称为“单元分解法”【Cell Decomposition】,其应用在位形空间中障碍是多边形的情况下尤为高效。
目标是将机器人的自由空间划分为一系列更简单的区域,然后将整体空间变成一张辅助图,其中利用各区的点和边来代表彼此相邻的区域。
这个图展示了单元分解法在二维空间中的一种常见表示法,对于这个例子。我们基于x轴对障碍物顶点进行了分类,并按照我们之前的想法,从左到右将自由空间划分为不同的区域;
可以看到这个过程,最终将二维自由空间划分为了一系列由梯形或三角形组成的区域。这么操作的好处是这些形状都是凸【convex】的,这意味着机器人可以安全地在任一单元内的任意两点间作直线运动。
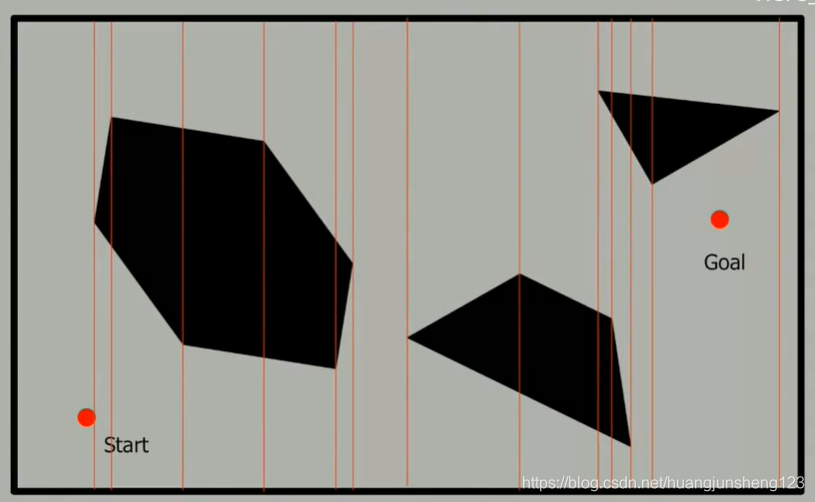
我们依旧可以作出一张辅助图,其中的(绿色)节点指明这些自由空间的梯形区域,图中的边则指明哪些区域是相邻的,然后找出哪些单元格包含起点和目标点。
然后如下所示,规划通过这两个节点之间的图形的路径。

感谢 B 站 up 主 Here_Kin 的翻译和分享!
【自制中英】宾夕法尼亚大学机器人专项课程二 运动规划 - Robotics:Motion and Planning

















 2131
2131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









