







上一篇文章中, 使用 MoveIt 控制自己的真实机械臂【1】——配置 action client 端,已经完成了 MoveIt 这边 action client 的基本配置,MoveIt 理论上可以将规划好的 trajectory 以 action 的形式发布出来了,浅浅尝试一下,在 terminal 中运行 roslaunch xmate7_moveit_config_new demo.launch
 报错提示他在等待
报错提示他在等待 xmate_arm_controller/follow_joint_trajectory 这个 action sever 的到来,显然,他等的好辛苦,却还是没有等来所期待的人,最终遗憾地告诉大家,以 xmate_arm_controller/follow_joint_trajectory 为 action 名称的 action client 端没有被连接。
此时,rostopic list 一下:
hjs@hjs:~/new_xmate7pro_ws$ rostopic list
/attached_collision_object
/collision_object
/execute_trajectory/cancel
/execute_trajectory/feedback
/execute_trajectory/goal
/execute_trajectory/result
/execute_trajectory/status
/head_mount_kinect/depth_registered/points
/joint_states
/move_group/cancel
/move_group/display_contacts
/move_group/display_cost_sources
/move_group/display_grasp_markers
/move_group/display_planned_path
/move_group/feedback
/move_group/filtered_cloud
/move_group/goal
/move_group/monitored_planning_scene
/move_group/motion_plan_request
/move_group/ompl/parameter_descriptions
/move_group/ompl/parameter_updates
/move_group/plan_execution/parameter_descriptions
/move_group/plan_execution/parameter_updates
/move_group/planning_scene_monitor/parameter_descriptions
/move_group/planning_scene_monitor/parameter_updates
/move_group/result
/move_group/sense_for_plan/parameter_descriptions
/move_group/sense_for_plan/parameter_updates
/move_group/status
/move_group/trajectory_execution/parameter_descriptions
/move_group/trajectory_execution/parameter_updates
/pickup/cancel
/pickup/feedback
/pickup/goal
/pickup/result
/pickup/status
/place/cancel
/place/feedback
/place/goal
/place/result
/place/status
/planning_scene
/planning_scene_world
/real_controller_joint_states
/recognized_object_array
/rosout
/rosout_agg
/rviz_hjs_12716_2381460729014530723/motionplanning_planning_scene_monitor/parameter_descriptions
/rviz_hjs_12716_2381460729014530723/motionplanning_planning_scene_monitor/parameter_updates
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update
/rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update_full
/tf
/tf_static
/trajectory_execution_event
会发现根本没有 xmate_arm_controller/follow_joint_trajectory 这个名称的 action 发布出来。
想想也能理解,MoveIt 端的 action client 苦苦等了好久的另一半(action server),action server 却终究没有出现和给出回应,那么action client自然也就,没有必要再将自己的爱意(xmate_arm_controller/follow_joint_trajectory) 表达出来了。
言归正传,之前在 Gazebo 中虚拟仿真的时候,是 Gazebo 的 ros_control 插件充当了 action server 的角色,让 MoveIt 端的 client 和 Gazebo 端的 server 建立了 action 通信连接;那么现在,针对真实机械臂,没有人再充当 action server 的角色了,自然也就没有 follow_joint_trajectory 发布出来,所以下一步要做的就是自己编写一个 Movet 端的 action client 所倾慕的 action server ,并为它们牵线(配置接口),介绍它们认识(建立连接),进而实现 follow_joint_trajectory 的发布和接收。
关于 ROS action 相关知识的学习自行补上,我编写的 action server 节点如下:
# include <ros/ros.h>
# include <actionlib/server/simple_action_server.h>
# include <control_msgs/FollowJointTrajectoryAction.h>
# include <std_msgs/Float32MultiArray.h>
# include <iostream>
# include <moveit_msgs/RobotTrajectory.h>
using namespace std;
// 重命名类型为 Server
typedef actionlib::SimpleActionServer<control_msgs::FollowJointTrajectoryAction> Server;
// 用于存储 moveit 发送出来的轨迹数据
moveit_msgs::RobotTrajectory moveit_tra;
void execute_callback(const control_msgs::FollowJointTrajectoryGoalConstPtr& goalPtr, Server* moveit_server)
{
// 1、解析提交的目标值
int n_joints = goalPtr->trajectory.joint_names.size();
int n_tra_Points = goalPtr->trajectory.points.size();
moveit_tra.joint_trajectory.header.frame_id = goalPtr->trajectory.header.frame_id;
moveit_tra.joint_trajectory.joint_names = goalPtr->trajectory.joint_names;
moveit_tra.joint_trajectory.points.resize(n_tra_Points);
for(int i=0; i<n_tra_Points; i++) // 遍历每组路点
{
moveit_tra.joint_trajectory.points[i].positions.resize(n_joints);
moveit_tra.joint_trajectory.points[i].velocities.resize(n_joints);
moveit_tra.joint_trajectory.points[i].accelerations.resize(n_joints);
moveit_tra.joint_trajectory.points[i].time_from_start = goalPtr->trajectory.points[i].time_from_start;
for(int j=0;j<n_joints; j++) // 遍历每组路点中的每个关节数据
{
moveit_tra.joint_trajectory.points[i].positions[j] = goalPtr->trajectory.points[i].positions[j];
moveit_tra.joint_trajectory.points[i].velocities[j] = goalPtr->trajectory.points[i].velocities[j];
moveit_tra.joint_trajectory.points[i].accelerations[j] = goalPtr->trajectory.points[i].accelerations[j];
}
}
cout << "The trajectory data is:" << "********************************************" << endl;
cout << moveit_tra;
cout << "********************************************" << "The trajectory data is finished printing." << endl;
ROS_INFO("The number of joints is %d.",n_joints);
ROS_INFO("The waypoints number of the trajectory is %d.",n_tra_Points);
ROS_INFO("Receive trajectory successfully");
moveit_server->setSucceeded();
}
int main(int argc, char *argv[])
{
ros::init(argc,argv,"moveit_action_server");
ros::NodeHandle nh;
// 创建 action 对象(NodeHandle,话题名称,回调函数解析传入的目标值,服务器是否自启动)
Server moveit_server(nh,"xmate_arm_controller/follow_joint_trajectory", boost::bind(&execute_callback, _1, &moveit_server), false);
// 手动启动服务器
moveit_server.start();
ros::spin();
return 0;
}
该节点实现的功能就是:
- 启动了一个
xmate_arm_controller/follow_joint_trajectory名称的 action server,而正是这个名称的 action,才是 MoveIt 端的 action client 所喜欢的,具体原因见上一篇博客5、创建 ros_controllers.yaml 文件; - 在启动的 action server 回调函数中解析了 MoveIt 规划的轨迹数据,并把该轨迹数据存储到了
moveit_msgs::RobotTrajectory类型的变量moveit_tra中。
验证:
- terminal 1:
roscore; - terminal 2: 启动 action server 节点,
rosrun xmate7_demo moveit_action_server;
此时 rostopic list 结果:
- terminal 3: 启动 action client 节点,
roslaunch xmate7_moveit_config_new demo.launch;
此时,终端不会报错,而且提示
[ INFO] [1658643437.543320231]: Added FollowJointTrajectory controller for xmate_arm_controller
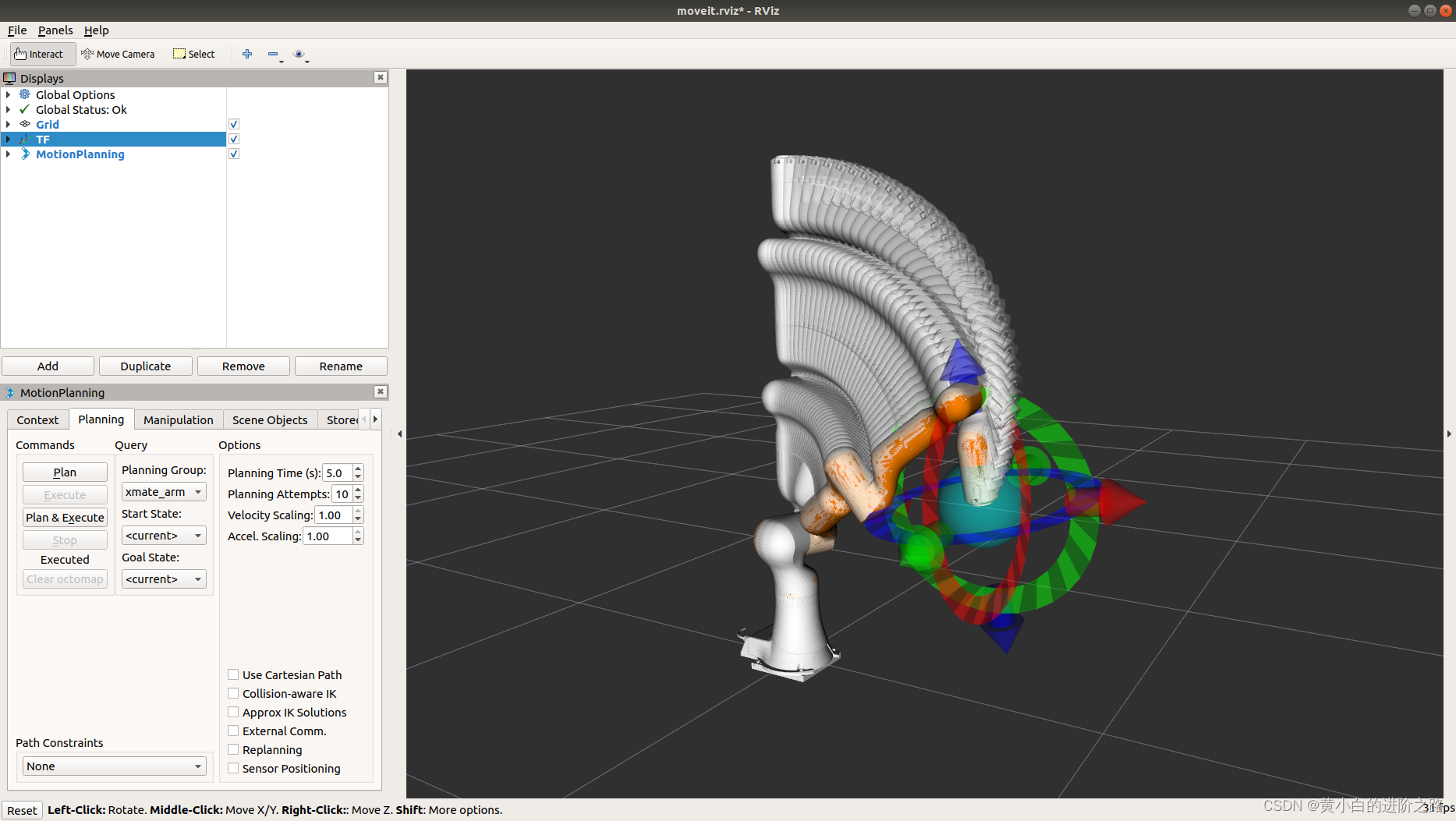
将 Rviz 中的拖动球拖动,点击 Plan & Excute 会发现 terminal 2会按照我所写代码打印出 MoveIt 的轨迹数据。
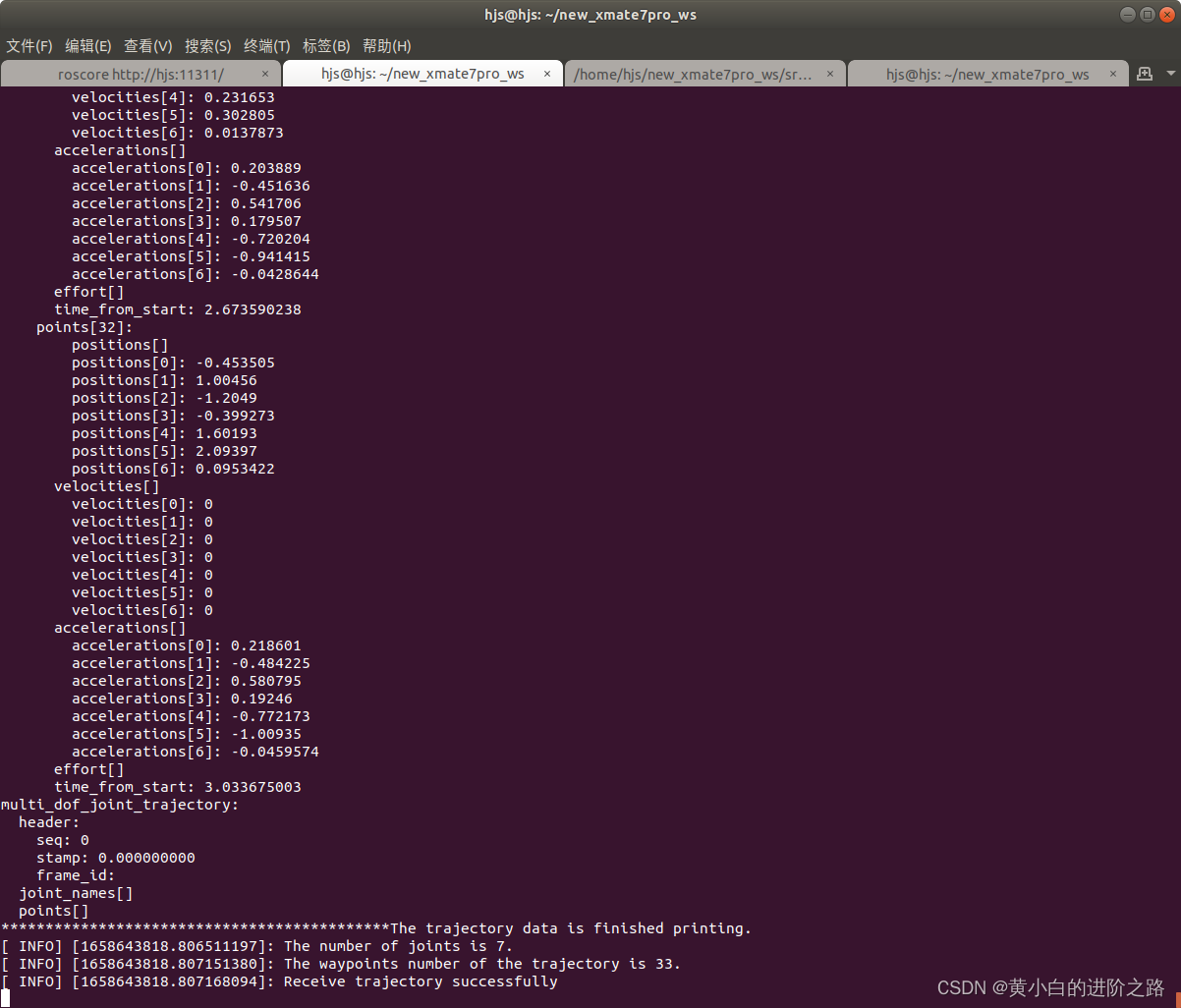
可见,MoveIt 规划的轨迹,让机械臂从 home 姿态运动到目标姿态生成了 33 个路点,对应每个路点的位置、速度、加速度以及时间戳也都解析到了 moveit_tra 这个变量中了,以上验证表明我们自己实现的 action server 代码实现了和 MoveIt 端 action client 的 connect,并且拿到了 MoveIt 规划出来的轨迹数据。顺其自然,为了实现用 MoveIt 控制自己的真实机械臂的宏图大业,当然下一步就是将我们拿到的 trajectory 数据作为指令数据发送给真实的机械臂去执行,这将在下一篇文章中描述。
另外,上述示例 action server 代码实现方式比较简单,还可以将 action server 封装成类的形式,在类中编写回调函数,丰富 action 机制的使用接口,在类中初始化 action 对象可参照action 官网。
参考文章:
CSDN_合工大机器人实验室:通过ROS控制真实机械臂(5)—Moveit!真实机械臂(move_group和demo.launch修改)
CSDN_爱学习的草莓熊:使用moveit!控制真实机械臂(5)——编写真实机械臂节点中的action服务程序















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









