






 本文介绍了如何在c++中编写ROS节点,包括简单的关节角度命令发布者simple_mover、提供安全移动服务的arm_mover以及根据摄像头数据响应的look_away节点。通过示例代码详细阐述了ROS发布者的工作原理,并展示了如何创建服务以实现节点间的请求/响应通信。
本文介绍了如何在c++中编写ROS节点,包括简单的关节角度命令发布者simple_mover、提供安全移动服务的arm_mover以及根据摄像头数据响应的look_away节点。通过示例代码详细阐述了ROS发布者的工作原理,并展示了如何创建服务以实现节点间的请求/响应通信。
---例程simple_mover
1.概述
在本文中,将学习如何在c++中编写ROS节点。
编写的第一个节点称为simple_mover。simple_mover节点只向simple_arm发布关节角度命令。
理解ROS节点的一般结构后,将编写另一个名为arm_mover的节点。arm_mover节点提供了一个名为safe_move的服务,该服务允许将手臂移动到工作区中被认为安全的任何位置。安全区域由最小和最大关节角度限定,并可通过ROS参数服务器进行配置。
本文编写的第3个节点是look_away节点。该节点订阅了手臂关节位置和一个主题,相机数据将在其中发布。当摄像头检测到一个颜色一致的图像时,意味着它正在看顶空,而手臂没有移动,节点将通过客户端调用safe_move服务将手臂移动到一个新的位置。
2.ROS发布者
在看到simple_mover的代码之前,了解ROS publisher在c++中的工作方式可能会有所帮助。发布者允许节点向主题发送消息,这样来自节点的数据就可以用于ROS的其他部分。在c++中,ROS发布者通常有以下定义格式,尽管其他参数和参数也是可能的:
ros::Publisher pub1 = n.advertise<message_type>("/topic_name", queue_size);
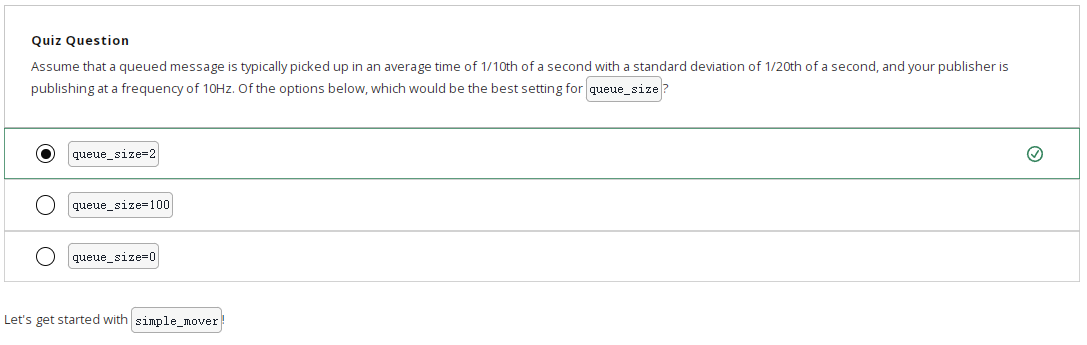
pub1对象是一个从ros:: publisher类实例化的发布者对象。该对象允许通过调用publish()函数来发布消息。要在c++中与ROS master通信,需要一个NodeHandle。节点句柄n将完全初始化该节点。advertise()函数用于与ROS通信,并通知希望在给定的主题名称上发布消息。“/topic_name”表示发布者将发布到哪个主题。message_type是发布在“/topic_name”上的消息的类型。例如,ROS中的字符串消息数据类型为std_msgs:: string。queue_size表示可以存储在队列中的消息数量。发布者可以将消息存储在队列中,直到消息可以发送为止。如果存储的消息数量超过队列的大小,则删除最老的消息。一旦创建了发布者对象pub1,就可以按照如下方式发布具有指定数据类型的消息:
pub1.publish(msg);
有关c++ ROS发布者的更多信息,请参阅这里的文档http://docs.ros.org/en/jade/api/roscpp/html/classros_1_1Publisher.html
3.第一个节点:Simple Mover
现在,将使用c++实现第一个ROS节点。这个节点称为simple_mover。顾名思义,这个节点只有一个职责,那就是为simple_arm命令关节运动。
目标
simple_mover节点的目标是命令简单臂中的每个关节,并使其随时间在-pi/2到pi/2之间摆动。下面是该节点运行的演示:
话题
为此,它必须向以下话题发布关节角度命令消息:
Topic Name | /simple_arm/joint_1_position_controller/command |
Message Type | std_msgs/Float64 |
Description | Commands joint 1 to move counter-clockwise, units in radians |
Topic Name | /simple_arm/joint_2_position_controller/command |
Message Type | std_msgs/Float64 |
Description | Commands joint 2 to move counter-clockwise, units in radians |
注意:需要创建一个catkin_ws包,并在/home/workspace/catkin_ws/src中克隆这个包:
$ mkdir -p /home/workspace/catkin_ws/src/
$ cd /home/workspace/catkin_ws/src/
$ git clone -b first_interaction https://github.com/udacity/RoboND-simple_arm/ simple_arm添加源目录
为了在c++中创建一个新节点,必须首先在simple_arm包中创建src目录,因为它还不存在。
$ cd /home/workspace/catkin_ws/src/simple_arm/
$ mkdir src创建一个新脚本
一旦创建了源目录,就可以将c++脚本添加到包中。现在,在包的源目录中创建simple_mover c++脚本。
$ cd /home/workspace/catkin_ws/src/simple_arm/src/
$ touch simple_mover.cpp4.Simple Mover: The Code
下面是simple_mover c++节点的完整代码,并嵌入了逐行注释。可以将这段代码复制并粘贴到/home/workspace/catkin_ws/src/simple_arm/src/目录中创建的simple_mover脚本,如下所示,
首先,打开一个新终端。然后:
$ cd /home/workspace/catkin_ws/src/simple_arm/src/
$ gedit simple_mover.cpp使用gedit编辑器打开了c++ simple_mover脚本,现在将下面的代码复制并粘贴到脚本中,并保存脚本。我鼓励您编写这段代码,而不是复制它,以便您更熟悉语法。
simple_mover.cpp
#include"ros/ros.h"
#include"std_msgs/Float64.h"
intmain(int argc, char** argv)
{
// Initialize the arm_mover node
ros::init(argc, argv, "arm_mover");
// Create a handle to the arm_mover node
ros::NodeHandle n;
// Create a publisher that can publish a std_msgs::Float64 message on the /simple_arm/joint_1_position_controller/command topic
ros::Publisher joint1_pub = n.advertise<std_msgs::Float64>("/simple_arm/joint_1_position_controller/command", 10);
// Create a publisher that can publish a std_msgs::Float64 message on the /simple_arm/joint_2_position_controller/command topic
ros::Publisher joint2_pub = n.advertise<std_msgs::Float64>("/simple_arm/joint_2_position_controller/command", 10);
// Set loop frequency of 10Hz
ros::Rate loop_rate(10);
int start_time, elapsed;
// Get ROS start time
while (not start_time) {
start_time = ros::Time::now().toSec();
}
while (ros::ok()) {
// Get ROS elapsed time
elapsed = ros::Time::now().toSec() - start_time;
// Set the arm joint angles
std_msgs::Float64 joint1_angle, joint2_angle;
joint1_angle.data = sin(2 * M_PI * 0.1 * elapsed) * (M_PI / 2);
joint2_angle.data = sin(2 * M_PI * 0.1 * elapsed) * (M_PI / 2);
// Publish the arm joint angles
joint1_pub.publish(joint1_angle);
joint2_pub.publish(joint2_angle);
// Sleep for the time remaining until 10 Hz is reached
loop_rate.sleep();
}
return0;
}代码解释
#include"ros/ros.h"ros是ROS的官方客户端库。它提供了通过c++与ROS接口所需的大部分基本功能。它具有用于创建节点和与主题、服务和参数交互的工具。
#include"std_msgs/Float64.h"从std_msgs包中导入Float64头文件。std_msgs (http://wiki.ros.org/std_msgs)包还包含ROS中的基本消息类型。稍后,将发布Float64消息到每个关节的位置命令主题。
ros::init(argc, argv, "arm_mover");ROS节点使用init()函数初始化,并向ROS Master注册。这里arm_mover是节点的名称。注意,main函数同时接受argc和argv参数,并将它们传递给init()函数。
ros::NodeHandle n;从NodeHandle类实例化一个节点句柄对象n。这个节点句柄对象将完全初始化节点,并允许它与ROS Master通信。
ros::Publisher joint1_pub = n.advertise<std_msgs::Float64>("/simple_arm/joint_1_position_controller/command", 10);
ros::Publisher joint2_pub = n.advertise<std_msgs::Float64>("/simple_arm/joint_2_position_controller/command", 10);声明了两个发布者,一个用于关节1命令,另一个用于关节2命令。节点句柄将告诉ROS主机将在关节主题上发布一条Float64消息。节点句柄还在advertise函数的第二个参数中将队列大小设置为10。
ros::Rate loop_rate(10);使用loop_rate对象设置10HZ的频率。在ROS中,速率用于限制某些循环的频率。选择过高的速率可能导致不必要的CPU占用,而选择过低的速率可能导致较高的延迟。为ROS系统中的所有节点选择合理的值是一门艺术。
start_time = ros::Time::now().toSec();我们将start_time设置为当前时间。稍后我们将使用它来确定已经过了多长时间。当使用模拟时间的ROS时(就像我们在这里所做的那样),ROS - time -now最初将返回0,直到收到关于/clock主题的第一条消息。这就是为什么设置start_time并连续轮询直到返回非零值的原因。
elapsed = ros::Time::now().toSec() - start_time;在主循环中,通过测量当前时间并减去开始时间来计算经过的时间。
std_msgs::Float64 joint1_angle, joint2_angle;
joint1_angle.data = sin(2 * M_PI * 0.1 * elapsed) * (M_PI / 2);
joint2_angle.data = sin(2 * M_PI * 0.1 * elapsed) * (M_PI / 2);关节角从周期为10秒的正弦波中采样,大小为[-pi/2, +pi/2]。
joint1_pub.publish(joint1_angle);
joint2_pub.publish(joint2_angle);每次遍历循环体都将导致发布两个关节的命令消息。
loop_rate.sleep();由于调用loop_rate.sleep(),循环以大约10赫兹的速度遍历。当节点接收到关闭信号(来自ROS Master或通过控制台窗口的信号)时,循环将退出。
5.Simple Mover: Build and Run
在运行simple_mover节点之前,必须编译c++脚本。
修改CMakeLists.txt
为了让catkin生成c++库,首先修改simple_arm的CMakeLists.txt。
CMake是基于catkin的构建工具,CMakeLists.txt是catkin使用的CMake脚本。如果您熟悉makefile的概念,这是类似的。
导航到包CMakeLists.txt文件并打开它:
$ cd /home/workspace/catkin_ws/src/simple_arm/
$ gedit CMakeLists.txt 首先,确保find_package()宏列出了std_msgs、message_generation和controller_manager作为必需的包。find_package()宏应该如下所示:
find_package(catkin REQUIRED COMPONENTS
std_msgs
message_generation
controller_manager
)顾名思义,std_msgs包包含所有基本消息类型,并且需要message_generation来为所有受支持的语言(cpp、lisp、python、javascript)生成消息库。controller_manager是另一个负责控制臂的包。
现在,在文件底部添加以下代码块:
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(simple_mover src/simple_mover.cpp)
target_link_libraries(simple_mover ${catkin_LIBRARIES})
add_dependencies(simple_mover simple_arm_generate_messages_cpp)这些指令要求编译器包含你的c++代码的目录、可执行文件、链接库和依赖项:
add_executable(node_name sourcecode_directory)创建可执行simple_mover文件。
target_link_libraries(node_name ${catkin_LIBRARIES})这将把所有链接的库添加到编译器中。
add_dependencies(node_name package_name_generate_messages_cpp)生成此包的消息头,然后才能使用它们。
请记住,无论何时要编写c++ ROS节点,都应该包含这些指令。有关CMakeLists.txt的更多信息,请查看ROS wiki上的CMakeLists.txt页面(http://wiki.ros.org/catkin/CMakeLists.txt)。
Building the Package构建包
现在已经包含了编译器的特定指令,让我们构建这个包:
$ cd /home/workspace/catkin_ws/
$ catkin_make运行simple_mover
假设您的工作空间最近已经构建好,您可以像下面这样启动simple_arm:
$ cd /home/workspace/catkin_ws/
$ source devel/setup.bash
$ roslaunch simple_arm robot_spawn.launchROS Master、Gazebo和所有相关节点启动并运行之后,我们就可以最终启动simple_mover了。为此,打开一个新终端并输入以下命令:
$ cd /home/workspace/catkin_ws/
$ source devel/setup.bash
$ rosrun simple_arm simple_moversimple_mover GitHub branch
https://github.com/udacity/RoboND-simple_arm/tree/simple_mover
6.ROS服务(ROS Services)
现在已经编写了第一个ROS节点,看到了发布到主题的工作方式,并且能够通过发布到/simple_arm/joint_1_position_controller/command主题和/simple_arm/joint_2_position_controller/command主题来控制机械臂。接下来,我们将看到另一个名为arm_mover的节点,它实现了safe_move服务,以允许服务调用来控制手臂。
定义服务
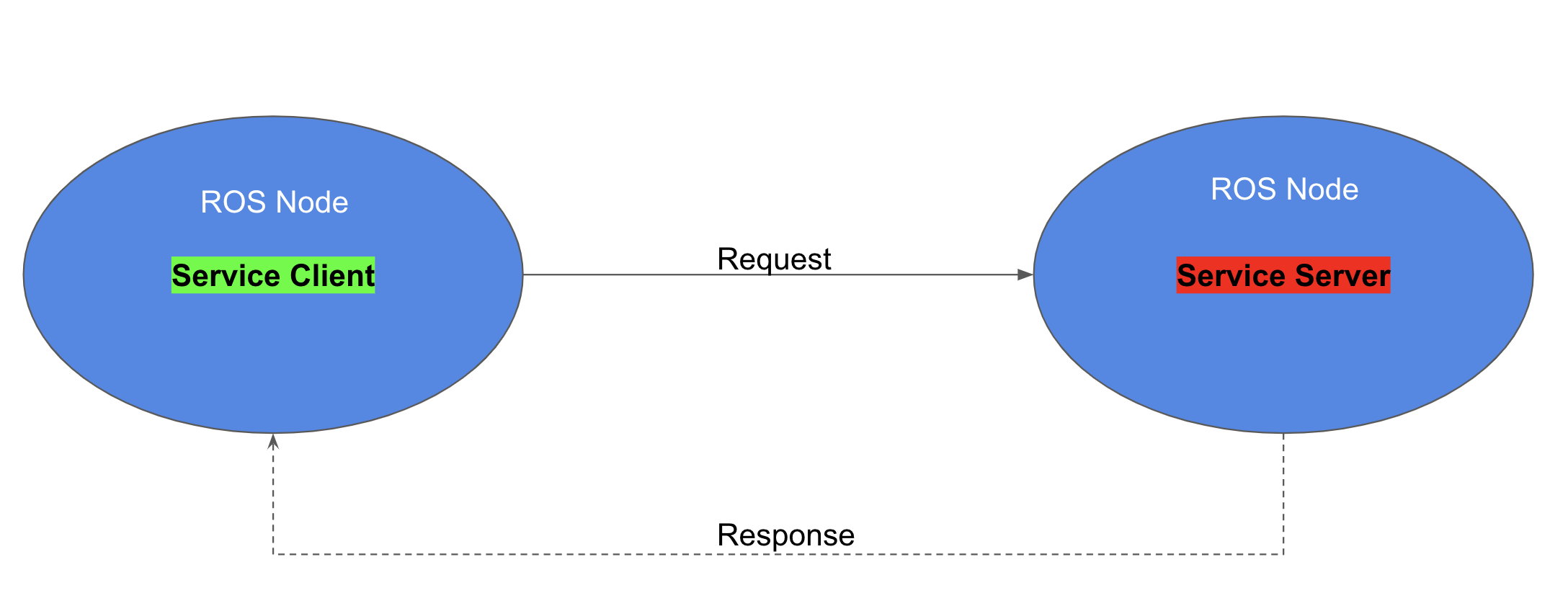
ROS服务允许节点之间存在请求/响应通信。在提供服务的节点中,请求消息由函数或方法处理。成功处理请求后,提供服务的节点将消息发送回请求者节点。在c++中,ROS服务服务器可以使用以下定义格式创建:
ros::ServiceServer service = n.advertiseService(`service_name`, handler);在ROS中,服务类名ServiceServer来自于服务定义所在的文件名。每个服务在.srv文件中提供一个定义;这是一个文本文件,为请求和响应提供适当的消息类型。
advertiseService()允许通过节点句柄n与ROS通信,并通知ROS所想要创建服务。
service_name是服务的名称。其他节点将使用此名称指定它们向其发送请求的服务。
handler(处理程序)是处理传入服务消息的函数或方法的名称。每次调用服务时都会调用此函数,来自服务调用的消息将作为参数传递给handler(处理程序)函数。handler(处理程序)应该返回适当的服务响应消息。
使用服务
命令行
服务可以直接从命令行调用,使用:
$ rosservice call service_name “request”拨打服务电话后,您将等待应答。
ROS服务客户端
另一种方法是从节点内以编程方式使用ROS服务。定义一个ROS client(ROS客户端),提供了向服务发送消息的接口:
ros::ServiceClient client = n.serviceClient<package_name::service_file_name>("service_name");ROS client(ROS客户端)可以使用的一种方式是发送请求,如下所示:
client.call(srv); // request a service 现在,我们将重点关注如何创建ROS service server(服务服务器)。稍后,在look_away节点中,将练习从service client(服务客户机)节点调用服务。
有关如何创建和调用ROS服务的详细说明,请参阅有关服务的ROS文档
http://wiki.ros.org/roscpp/Overview/Services。
让我们从arm_mover代码开始,这样就可以看到如何将safe_move服务与节点中的发布者结合起来,以便每当请求一个服务时,它将负责发布关于主题的消息。

















 3007
3007

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









