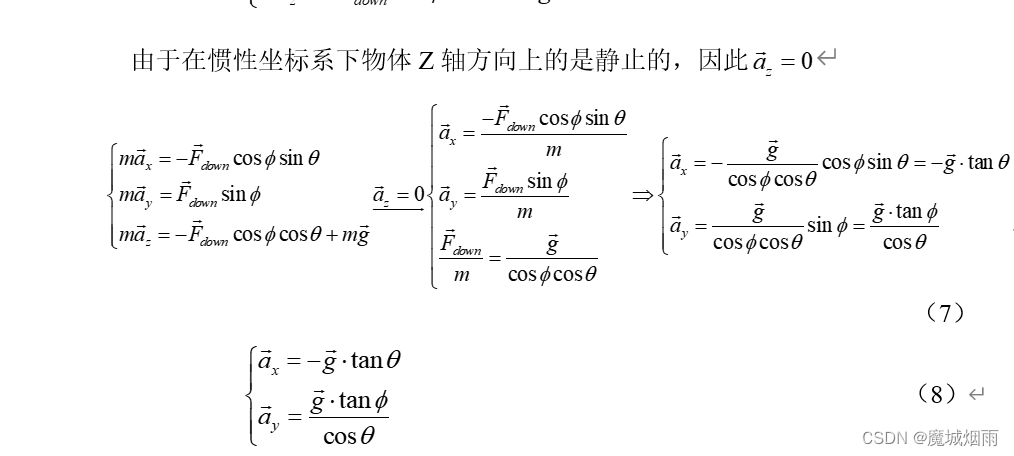
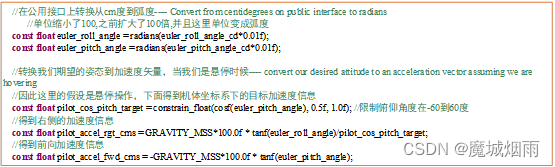
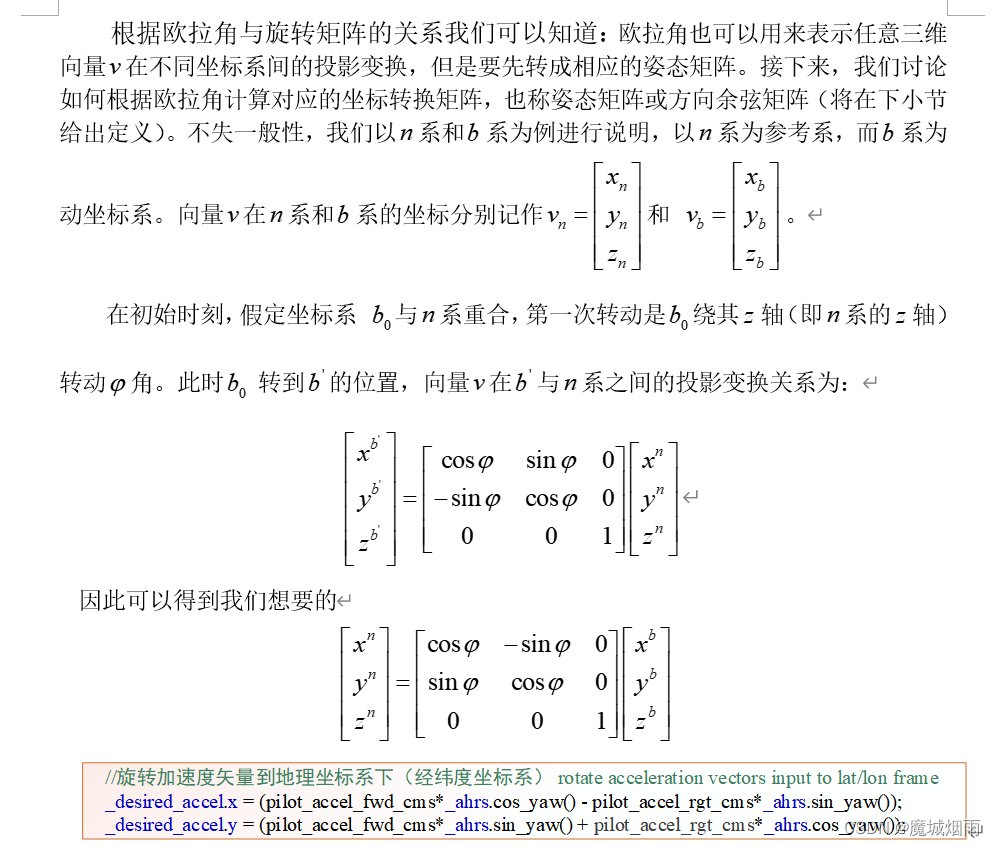
目录 文章目录 目录 摘要 1.理论依据 2程序细节分析 3.代码实现 摘要 主要根据遥控器的横滚,俯仰通道值转换成对应的欧拉角度,然后根据欧拉角度转换成地理坐标系下的目标加速度的过程。 1.理论依据 2程序细节分析 根据公式(8)我们可以得到前右下坐标系下对应的加速度: 到这里我们得到了前右下坐标系下的加速度,此时我们只需要转换到地理坐标系即可。 3.代码实现 很早之前的代码实现过程 void AC_Loiter::set_sky_droid_pilot_desired_acceleration








 超级会员免费看
超级会员免费看

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








