




 在ROS Melodic中遇到[joint_state_publisher-3]进程死亡的问题,伴随有URDF文件错误和软件包下载失败。解决方案包括检查URDF文件首行和中文注释,更新joint_state_publisher_gui,更改ROS软件源至清华源,并处理GPG签名错误。
在ROS Melodic中遇到[joint_state_publisher-3]进程死亡的问题,伴随有URDF文件错误和软件包下载失败。解决方案包括检查URDF文件首行和中文注释,更新joint_state_publisher_gui,更改ROS软件源至清华源,并处理GPG签名错误。
问题描述:在编写完urdf文件后,运行launch文件出现 子级连杆和父级连杆的位置不对,且不能转动,并且在终端上出现如下问题:[joint_state_publisher-3] process has died [pid 83185, exit code 1, cmd /opt/ros/melodic/lib/joint_state_publisher/joint_state_publisher __name:=joint_state_publisher __log:=/home/melodic/.ros/log/bd2f494e-c9bf-11eb-8f55-000c295384a4/joint_state_publisher-3.log].
log file: /home/melodic/.ros/log/bd2f494e-c9bf-11eb-8f55-000c295384a4/joint_state_publisher-3*.log
我的urdf文件为
问题解决:
1、确保urdf文件的首行不能是注释
2、确保urdf文件中没有中文注释
3、更新joint_state_publisher_gui
sudo apt-get install ros-xxx-joint-state-publisher-gui
xxx替换为当前ros版本 kinetic indigo melodic等
最后再rosrun一下launch文件
roslaunch urdf01_rviz demo03_joint.launch

在问题解决的第三步可能会出现问题
E 无法下载 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-joint-state-publisher-gui/ros-melodic-joint-state-publisher-gui_1.12.15-1bionic.20210414.223440_amd64.deb 404 Not Found [IP: 101.6.8.193 80]
E: 有几个软件包无法下载,要不运行 apt-get update 或者加上 --fix-missing 的选项再试试?
解决方法:
1、sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' 代码片
2、在软件和更新中将源改为清华源

3、sudo apt-get update
在其中若是出现问题:
W: 校验数字签名时出错。此仓库未被更新,所以仍然使用此前的索引文件。GPG 错误:http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic Release: 下列签名无效: EXPKEYSIG F42ED6FBAB17C654 Open Robotics info@osrfoundation.org
W: 无法下载 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/dists/bionic/Release.gpg 下列签名无效: EXPKEYSIG F42ED6FBAB17C654 Open Robotics info@osrfoundation.org
W: 部分索引文件下载失败。如果忽略它们,那将转而使用旧的索引文件。
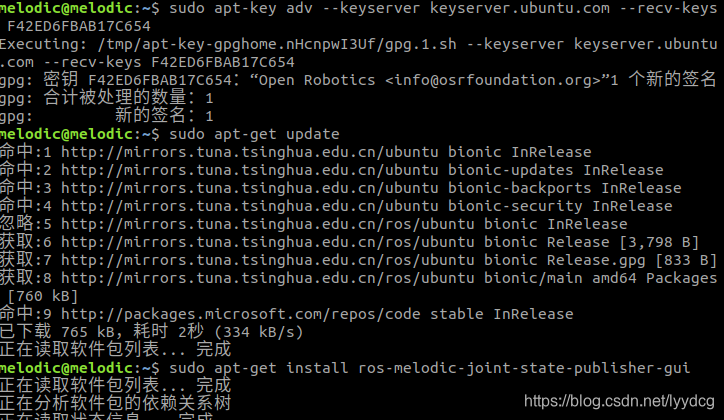
此时解决办法是:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
4、sudo apt-get install ros-melodic-joint-state-publisher-gui

















 6940
6940












 到【灌水乐园】发言
到【灌水乐园】发言







