




ROS通信机制包括话题通信、服务通信和参数服务器三种通信方式,各原理及代码实现如下表

| 功能 | 博客链接 | 说明 |
|---|---|---|
| VScode配置 ROS 环境 | VScode创建ROS项目 ROS集成开发环境 | 使用VScode使用配置了ROS开发环境,实现ROS开发的第一步 |
| 话题通信理论 | ROS话题通信流程理论 | 介绍了话题通信机制的原理 |
| ROS话题通信机制实操C++ | ROS话题通信机制实操C++ | 手把手的用C++实现了话题通信机制 |
| ROS话题通信机制实操Python | ROS话题通信机制实操Python | 手把手的用Python实现了话题通信机制 |
| ROS话题通信流程自定义msg格式 | ROS话题通信流程自定义msg格式 | 介绍了如何准备话题通信机制自定义msg数据格式,及相关配置 |
| ROS话题通信机制自定义msg实战C++ | ROS话题通信机制自定义msg实战C++ | 手把手的用C++实现了话题通信机制自定义msg数据通信 |
| ROS话题通信机制自定义msg实战Python | ROS话题通信机制自定义msg实战Python | 手把手的用Python实现了话题通信机制自定义msg数据通信 |
| 服务通信理论 | ROS服务通信流程理论 | 介绍了服务通信机制的原理 |
| ROS服务通信自定义srv | ROS服务通信自定义srv | 介绍了如何准备服务通信机制自定义srv数据格式,及相关配置 |
| ROS服务通信机制实操C++ | ROS服务通信机制实操C++ | 手把手的用C++实现了服务通信机制 |
| ROS服务通信机制实操Python | ROS服务通信机制实操Python | 手把手的用Python实现了话题通信机制 |
| 参数服务器理论 | ROS参数服务器理论模型 | 介绍了参数服务器的原理 |
| ROS参数服务器增删改查实操C++ | ROS参数服务器增删改查实操C++ | 用 C++ 实现了参数服务器的的增删改查操作 |
| ROS参数服务器增删改查实操Python | ROS参数服务器增删改查实操Python | 用 Python 实现了参数服务器的的增删改查操作 |
ROS话题通信的理论查阅ROS话题通信流程理论
在ROS话题通信机制实现中,ROS master 不需要实现,且连接的建立也已经被封装了,需要关注的关键点有三个:
- 发布方(二狗子)
- 订阅方(翠花)
- 数据(此处为普通文本)
创建ROS工程
创建一个ROS工程包括以下几个步骤:
- 创建一个
topic_ws的ROS工作空间 - 启动VScode
- VScode 编译ROS
- 创建ROS功能包
- 在功能包下创建一个
scripts文件
详细操作可以查阅VScode创建ROS项目 ROS集成开发环境
发布方(二狗子)
-
基本流程
- 1.包含头文件
- 2.初始化 ROS 节点:命名(唯一)
- 3.实例化 发布者 对象
- 4.组织被发布的数据,并编写逻辑发布数据
-
代码实现
#! /usr/bin/env python3 import rospy from std_msgs.msg import String """ 实现流程: 1.导包 2.初始化 ROS 节点:命名(唯一) 3.实例化 发布者 对象 4.组织被发布的数据,并编写逻辑发布数据 """ if __name__ == "__main__": #2.初始化 ROS 节点:命名(唯一) rospy.init_node("erGouzi") #3.实例化 发布者 对象 pub = rospy.Publisher("fang",String,queue_size=10) #4.组织被发布的数据,并编写逻辑发布数据 msg = String() #创建 msg 对象 count = 0 #计数器 # 设置循环频率 rate = rospy.Rate(1) rospy.sleep(3) # 休眠3s等待 publisher 注册完成,不然订阅者读不到第一条消息 while not rospy.is_shutdown(): #拼接字符串 msg.data = "cuiHua 你好 ---> " + str(count) pub.publish(msg) rate.sleep() rospy.loginfo("写出的数据:%s",msg.data) count += 1 -
添加可执行权限
进入到scripts文件下,打开Terminal,执行chmod +x demo_pub_p.py对demo_pub_p.py文件添加可执行的权限

-
验证是否存在问题
-
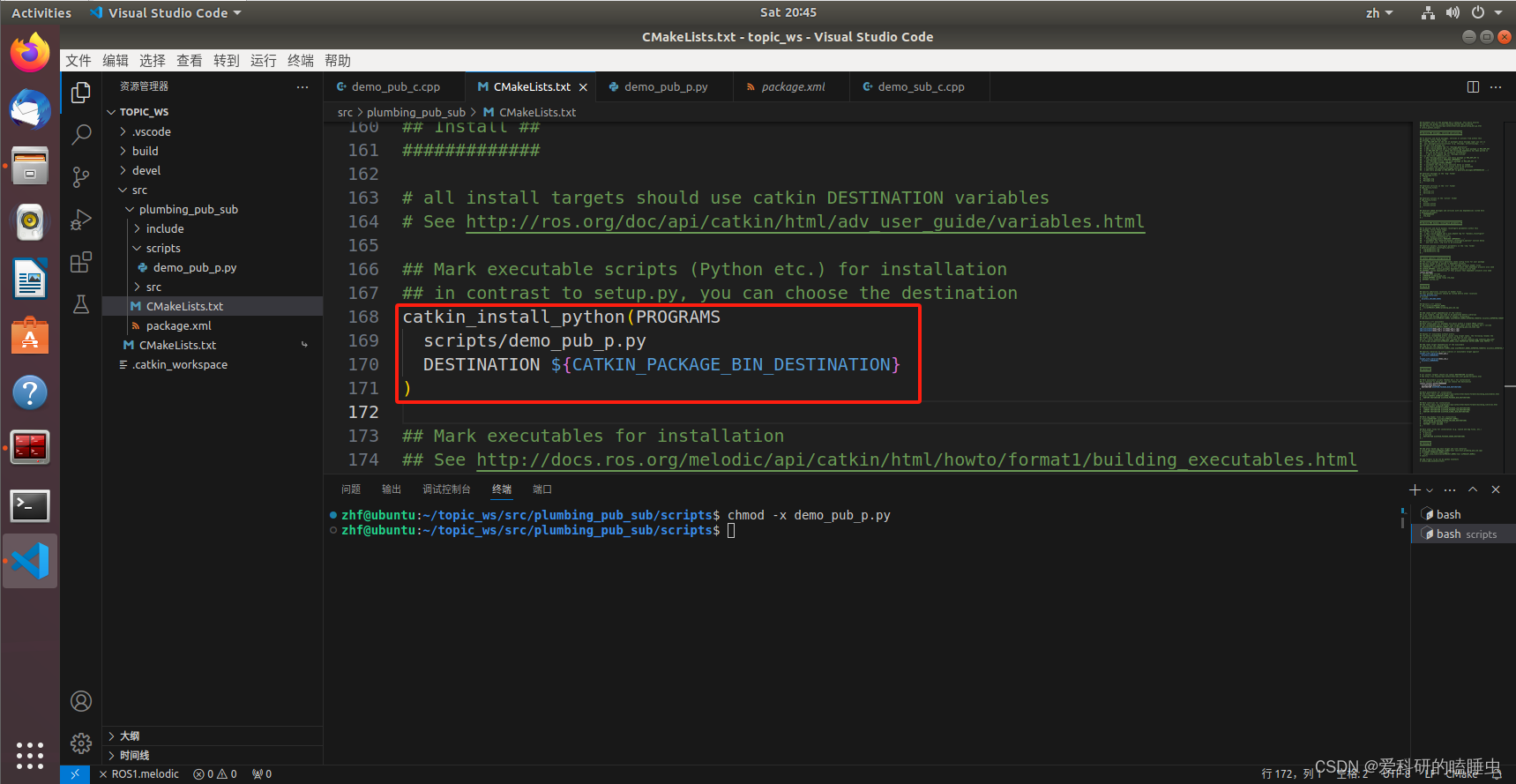
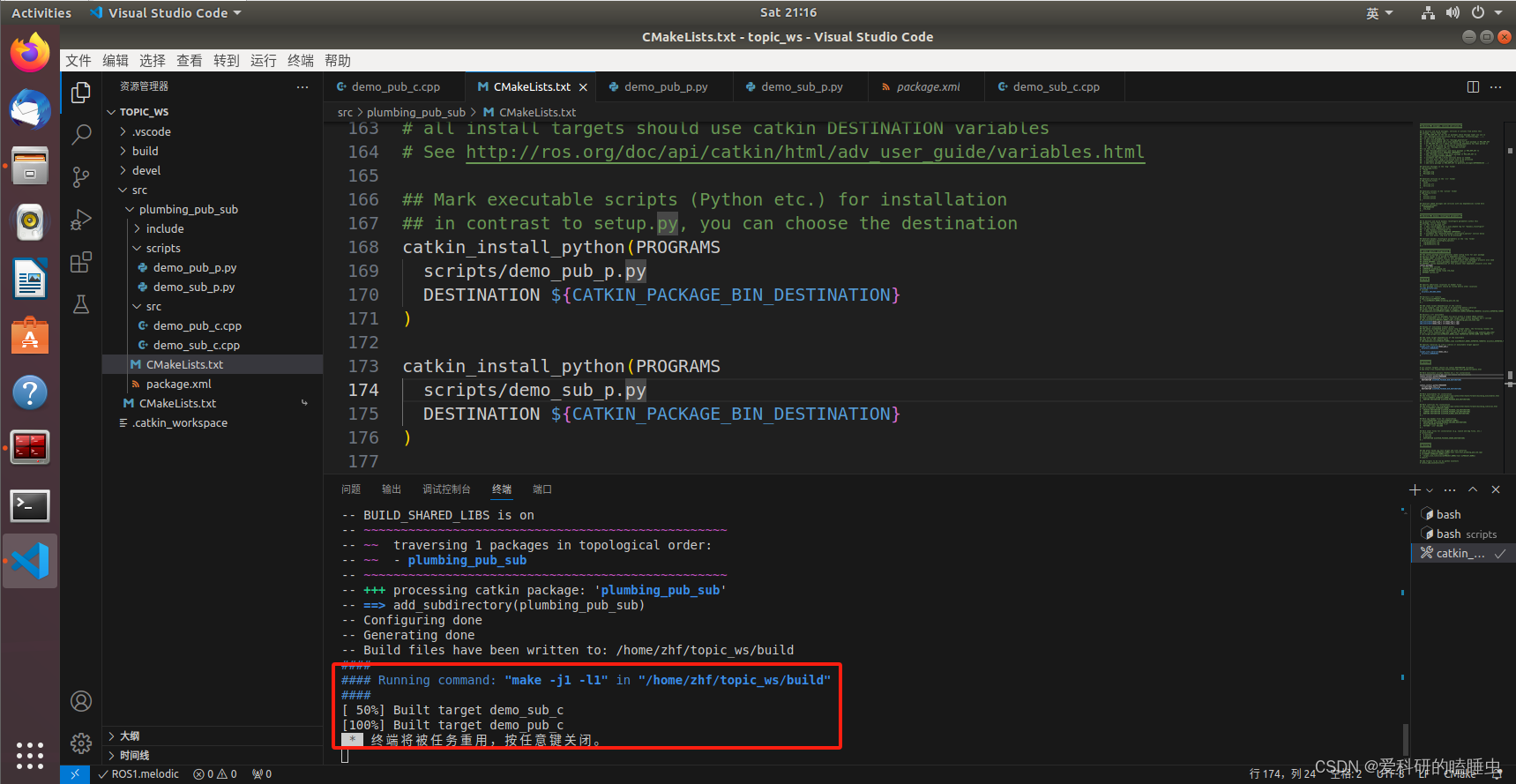
编辑配置文件
修改plumbing_pub_sub功能包下的CMakeLists.txt,找到catkin_install_python,修改成如图所示
-
按快捷键
ctrl + shift + B编译 -
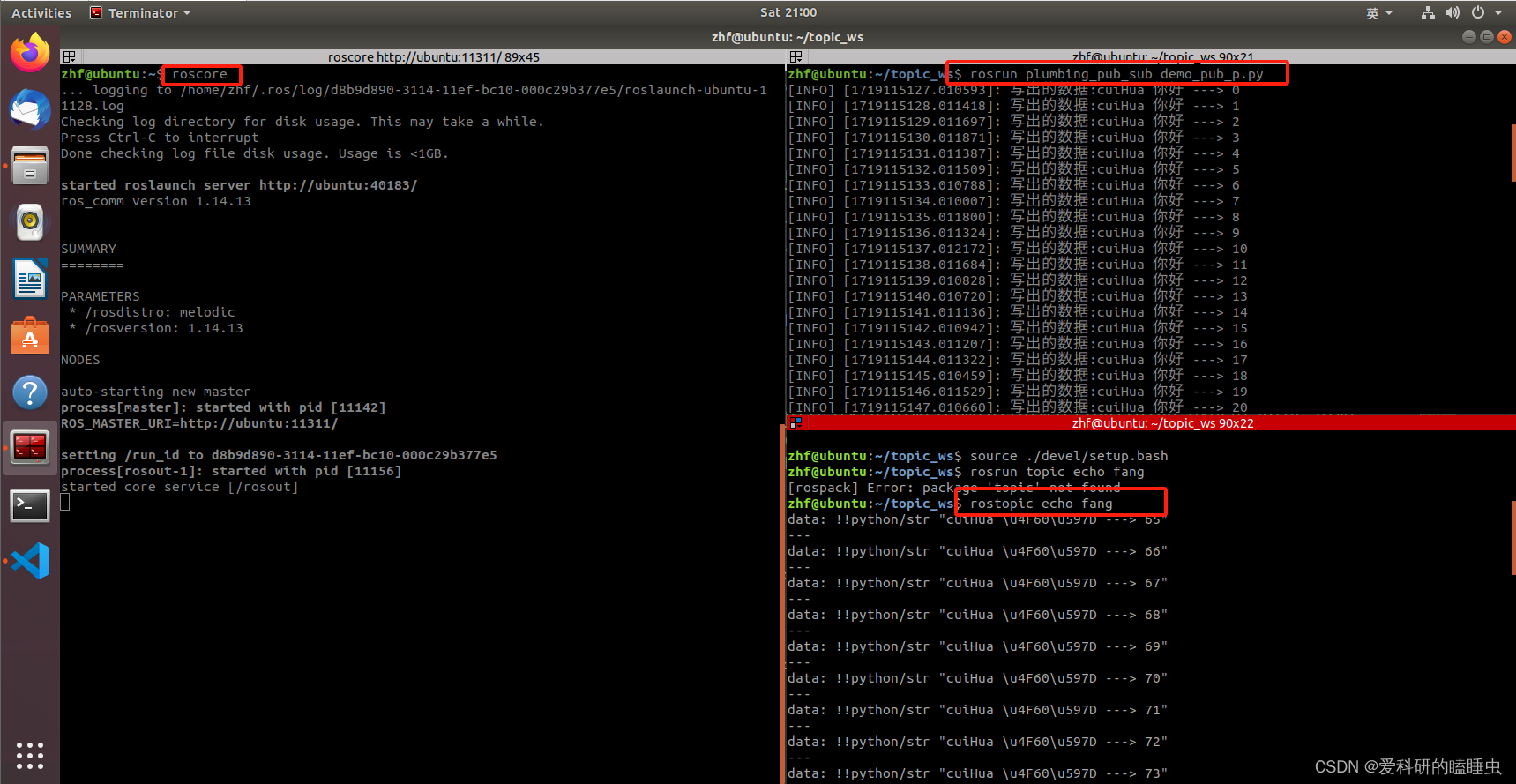
开启一个Terminal,运行 roscore 命令;再开启一个新的Terminal,运行
source ./devel/setup.bash rosrun plumbing_pub_sub demo_pub_p.py;再开启一个Terminal,运行rostopic echo fang,查看订阅数据
-
订阅方(翠花)
-
基本流程
- 1.包含头文件
- 2.初始化 ROS 节点:命名(唯一)
- 3.实例化 订阅者 对象
- 4.处理订阅的消息(回调函数)
- 5.设置循环调用回调函数
-
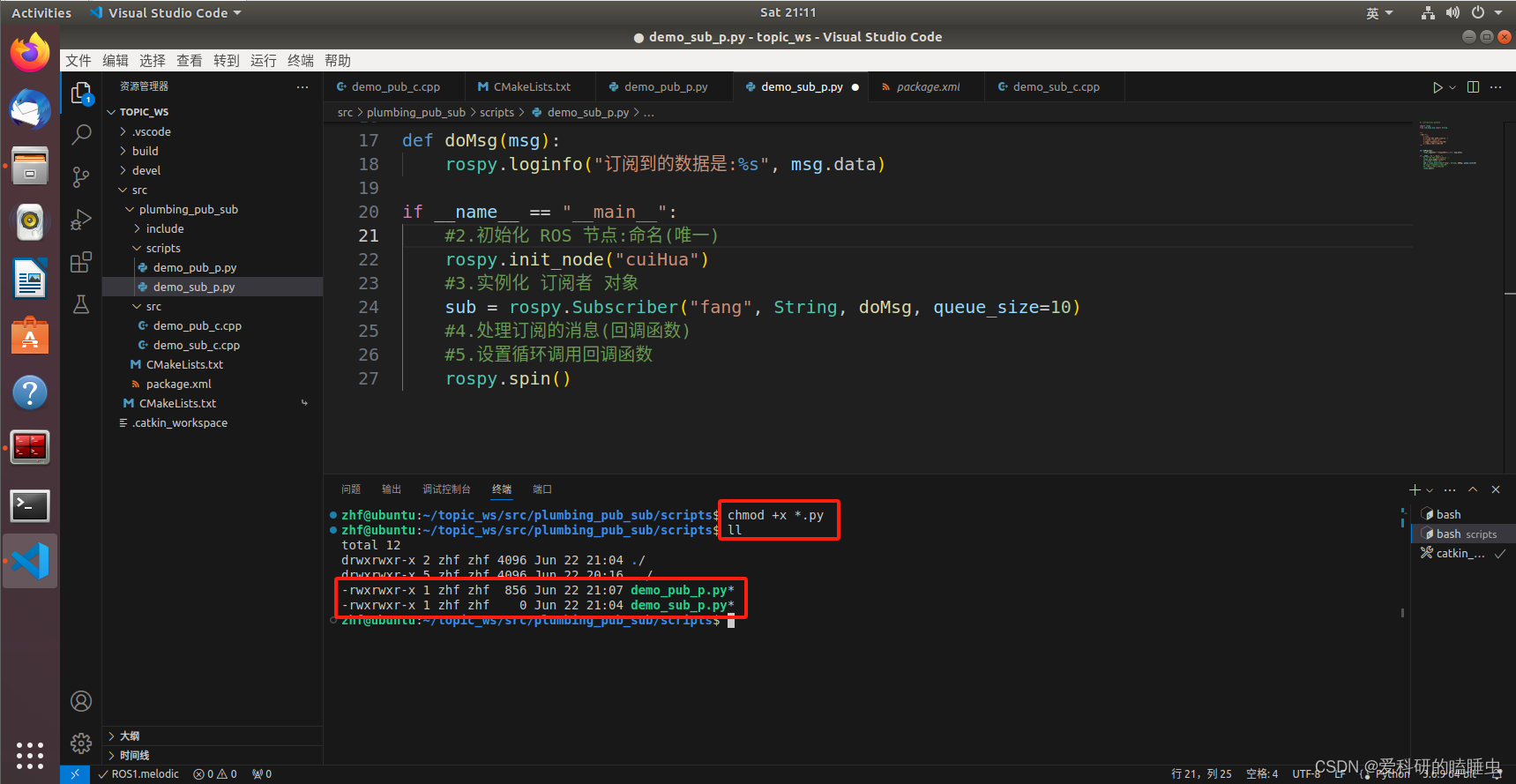
代码实现
#! /usr/bin/env python3 import rospy from std_msgs.msg import String """ 实现流程: 1.导包 2.初始化 ROS 节点:命名(唯一) 3.实例化 订阅者 对象 4.处理订阅的消息(回调函数) 5.设置循环调用回调函数 """ def doMsg(msg): rospy.loginfo("订阅到的数据是:%s", msg.data) if __name__ == "__main__": #2.初始化 ROS 节点:命名(唯一) rospy.init_node("cuiHua") #3.实例化 订阅者 对象 sub = rospy.Subscriber("fang", String, doMsg, queue_size=10) #4.处理订阅的消息(回调函数) #5.设置循环调用回调函数 rospy.spin() -
添加可执行权限
进入到scripts文件下,打开Terminal,执行chmod +x *.py对demo_sub_p.py文件添加可执行的权限
发布方、订阅方声明的话题必须一致,案例中的话题是 fang
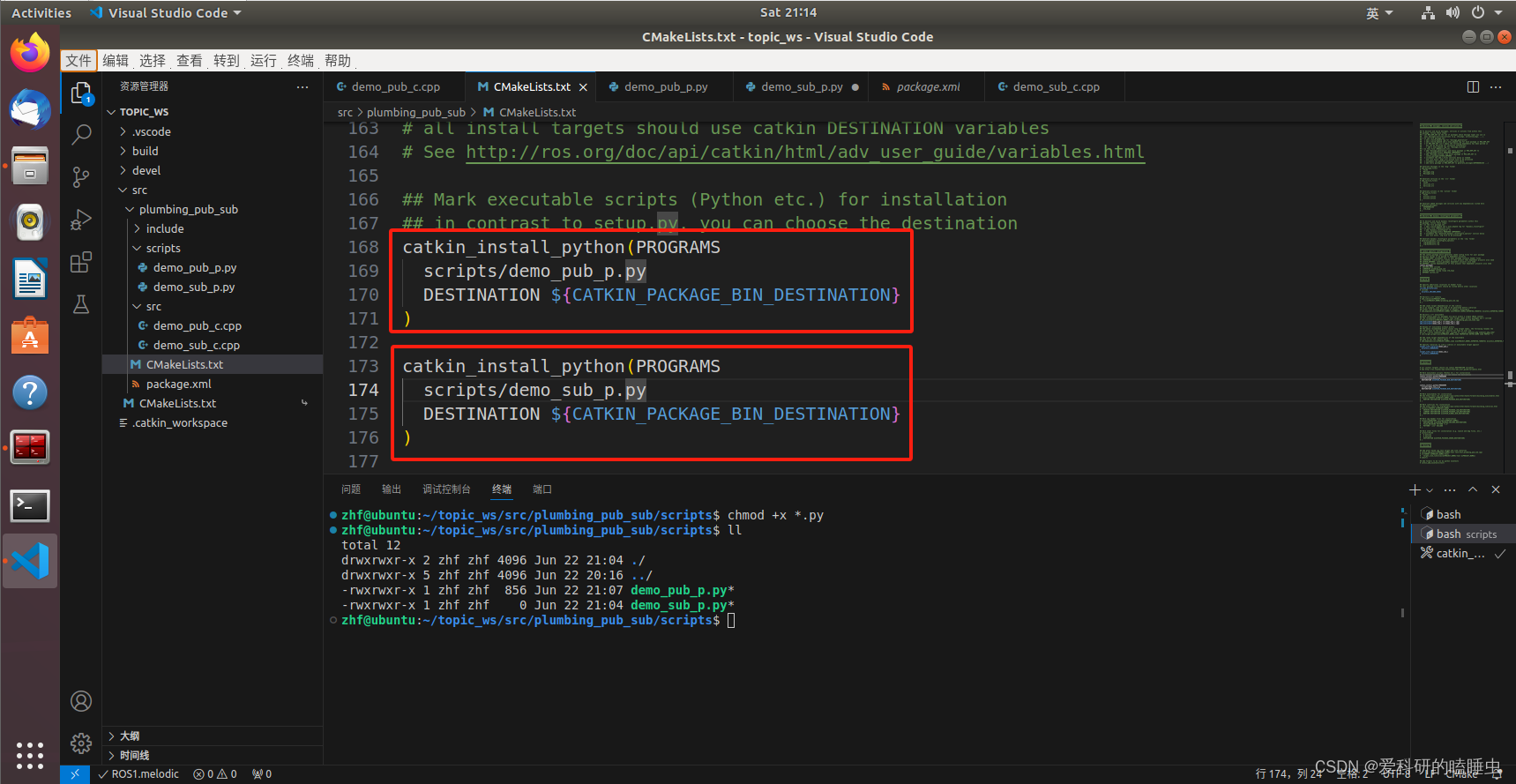
编辑配置文件
修改 plumbing_pub_sub 功能包下的CMakeLists.txt,找到同时复制一个catkin_install_python,修改成如图所示
编译并执行
- 按快捷键
ctrl + shift + B编译
- 执行代码
-
1.启动 roscore;
开启一个Terminal,启动 roscore
-
2.启动发布节点;
开启一个新的Terminalcd topic_ws/ source ./devel/setup.bash rosrun plumbing_pub_sub demo_pub_p.py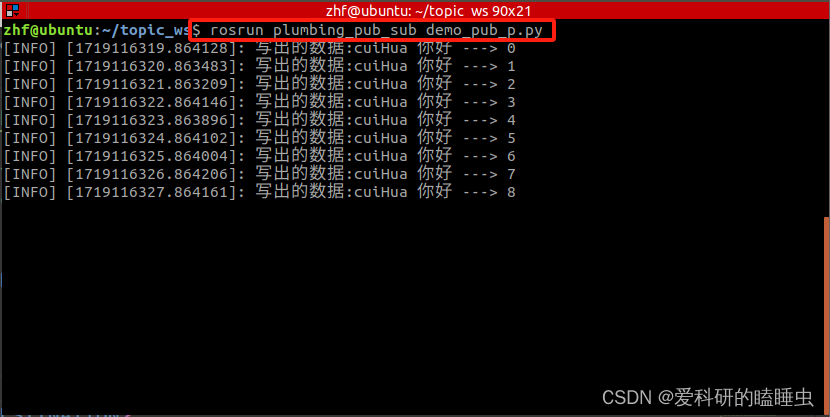
-
3.启动订阅节点。
cd topic_ws/ source ./devel/setup.bash rosrun plumbing_pub_sub demo_sub_p.py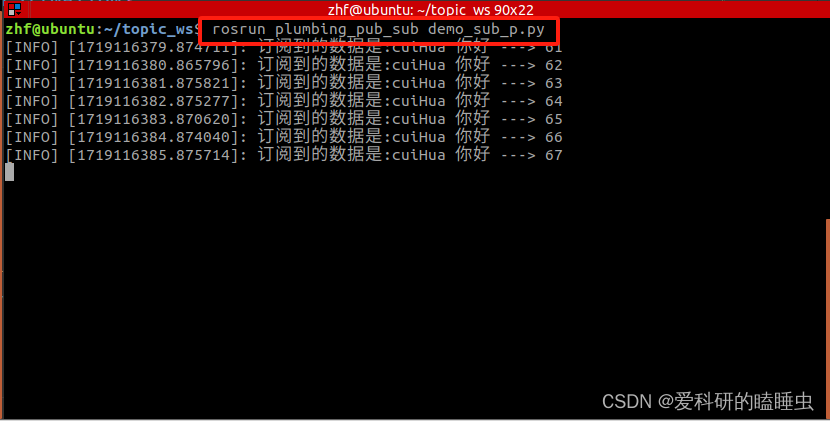
-
计算图查看Python话题机制节点
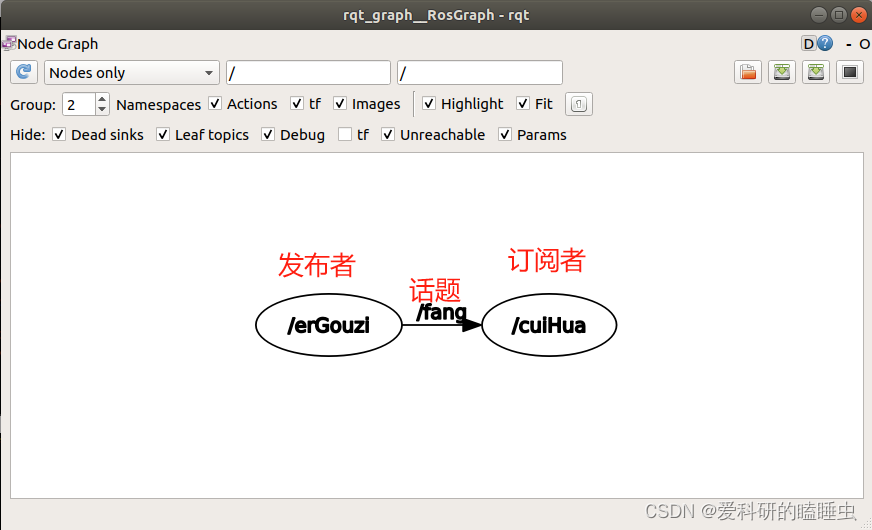
开启一个Terminal,运行 roscore 命令;再开启一个新的Terminal,运行source ./devel/setup.bash rosrun plumbing_pub_sub demo_pub_p.py ;再开启一个Terminal,运行rostopic echo fang,查看订阅数据;再开启一个Terminal,运行 rqt_graph
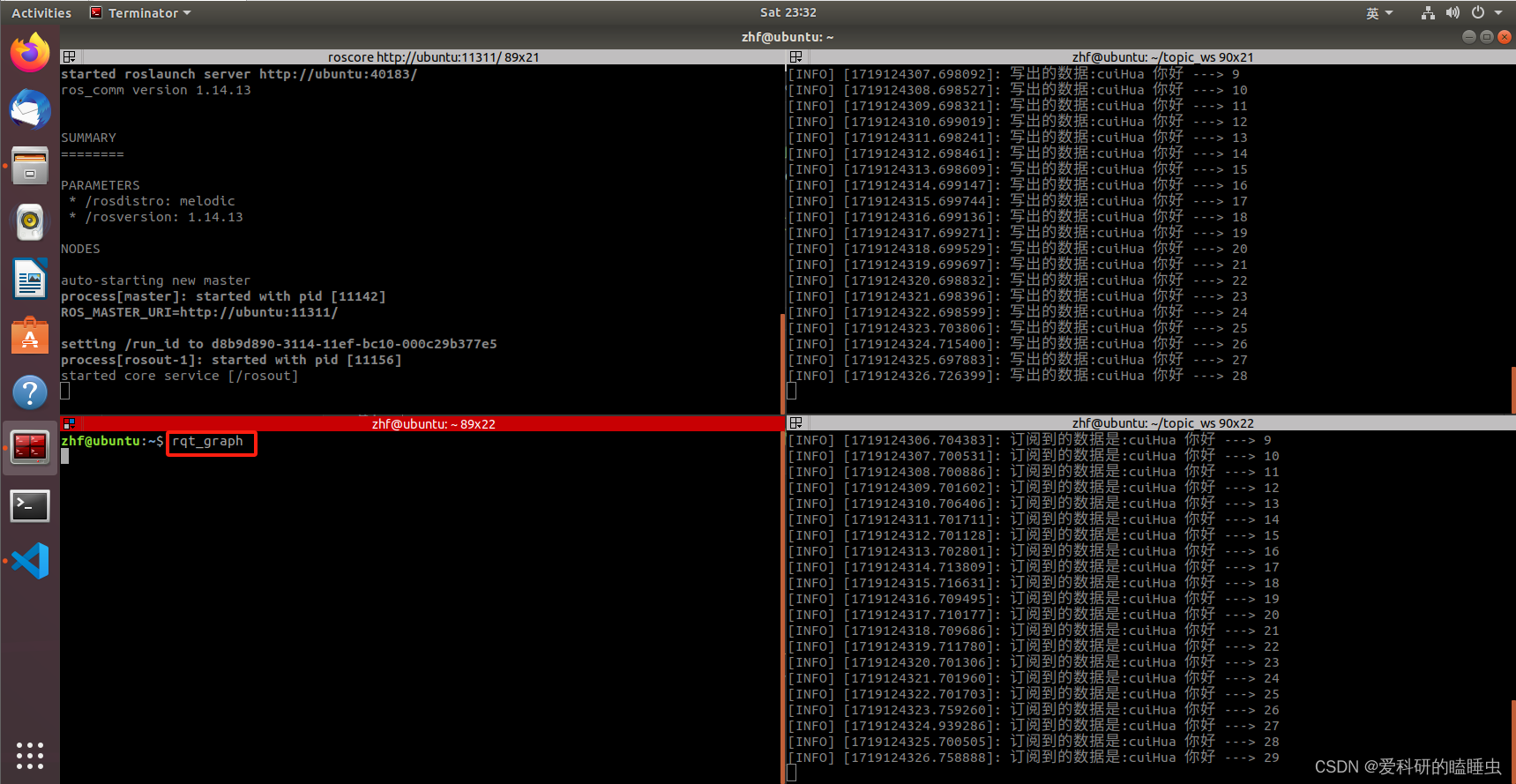
计算图如图所示:


















 1824
1824

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









