







协同避障分类
障碍物避免控制算法可以大致分为两类:基于规则的方法和基于优化的方法。基于规则的方法的一个例子是基于人工势场的避障方法。基于优化的方法的典型例子是模型预测控制(MPC)。在编队控制过程中,主控制算法与基于共识的控制理论相结合,实现了良好的控制器设计。基于共识的无人机协同编队控制算法是一种分布式控制方法,具有网络结构灵活性的优点,可以实现多通道复合控制避障。所谓的一致性算法意味着每个无人机在一定的控制协议下具有恒定的相对位置和相同的姿态,可以达到协同避碰的目的。关于多智能体系统的避障控制所产生的关键问题是如何应用基于共识的算法来有效地解决问题[,因为这样做会大大降低问题的复杂性。多无人机系统的动力学可以模拟为四阶系统的垂直平面和垂直方向的单独二阶系统。
- 1)本文使用单一无人机或无人机编队的相同简单模型,我们提出的基于共识的算法也具有以下优点:三维空间中的有效碰撞避免。此外,基于共识的算法保证了无人机编队将会聚到所需的路径,同时保持任何附近障碍物与地层中心无人机之间的安全距离;也就是说,它们之间的相对距离误差收敛到一个小的,稳定的值。
- 2)许多研究人员提出了基于共识的控制算法,可以保证收敛到所需的地层飞行路径。然而,[16]中提出的控制算法仅用于在水平面上形成飞行,而不是在三维空间中。在这项研究中,我们提出的控制算法也可以有效地避免垂直方向上的障碍,从而使其比其他学者提出的算法更广泛适用和灵活。在本文中,我们建议将基于共识算法的改进的非正式场景方法与“领导者-跟随者”控制策略相结合,以应用于三个UAV信息的系统。
- 3)来自半物理仿真平台的仿真结果表明良好的稳定性。下一个主要任务是将我们提出的方法应用于真实的无人机编队,以测试其有效避开三维空间障碍的能力;然而,本文只提出了一个理论研究。
本文考虑了由三个固定翼无人机组成的常规三角形无人机编队,包括一个领导者和两个追随者。它们位于正三角形的三个顶点,并被视为控制对象。每个无人机配备一个位置传感器,它们可以通过双向信息流相互共享特定位置,构成双向网络结构。在多UAV协同编队飞行期间,当UAV形成接近静止或移动障碍物时,运行嵌入在UAV控制器中的基于共识的碰撞避免算法,他们使用无人机位置传感器的容易度来引起无人机采取规避行动。碰撞避免算法确保障碍物与最靠近障碍物的UAV之间的相对距离大于它们之间的安全距离,以成功地实现与最佳路径的碰撞避免。在第二节III,我们提出了垂直方向线性化无人机的数学建模和多无人机系统,并定义了控制目标。
III. UAV 编队控制
作为控制对象的常规三角形无人机编队由两名追随者和本文的领导者组成。 针对无人机编队控制,提出了一种改进的人工势场算法,实现了三维空间中的碰撞避免。
A. 建模单个无人机模型
假设有 N ( N > 1 ) N(N> 1) N(N>1)个无人机具有相同的动态特性,包括 N − 1 N-1 N−1个追随者和一个领导者,它们共同组成一个多无人机编队系统。每个无人机配备有一套完整的通信设备和控制器,每个跟随器接收来自领导者的控制命令并执行相应的操纵。为了建立这种无人机的简单模型,让我们做出四个假设,如下所示。首先,可以忽略发送命令的领导者和接收命令的跟随者之间的动态响应时间。其次,无人机的飞行速度足够慢,以至于可以忽略作用于无人机的外部气动力,例如气动阻力和叶片涡旋相互作用。第三,为了保持UAV形成的几何配置,每个UAV被视为刚体。第四,当在恒定高度上悬停时,UAV处于对应于非线性系统的平衡点的状态,其可以在纵向,横向和垂直方向上解耦成线性系统。本文重点研究了横向和纵向的线性系统,因此可以建立单个无人机的数学模型如下。首先,给出了包括横向,滚动和俯仰力矩在内的单个UAV的连续水平数学模型
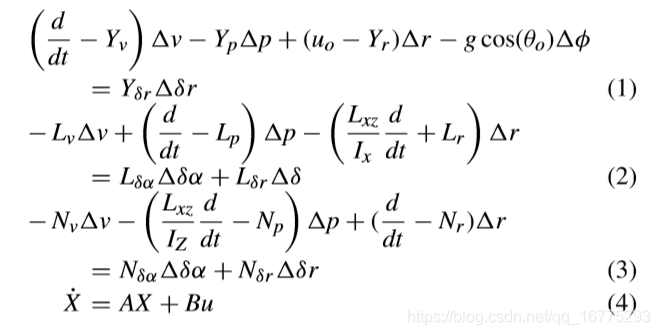
其中
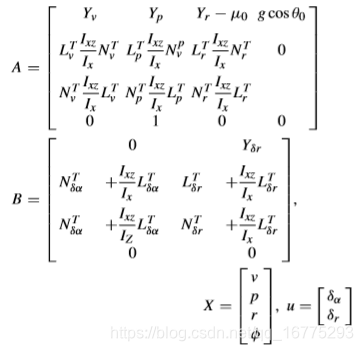
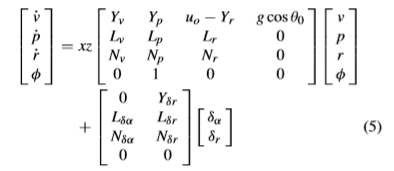
这里,v是空速(m / s),p是滚转速率(deg / s),q是俯仰速率(deg / s),r是横摆率(deg / s),θ是俯仰角 (deg),α是攻角,L是横轴,δα是指令输入信号的迎角,δγ是指令输入信号的横摆率,Y是y轴,g是重力加速度常数(m / s2))。 假设惯性积满足,Eqs。 (1)至(3)简化为
B.控制目标
在本文中,我们希望在执行战斗任务期间,两个追随者之间,领导者和追随者之间,或无人机与任何移动或静止障碍物之间不应发生碰撞。此外,编队系统应该收敛在保持其三角形形成的同时达到预期的轨迹,并且预期的时变轨迹由编队的构造决定;换句话说,路径是由领导者定义的。此外,如何选择领导者或追随者的形成也非常关键[23] - [25]。三架无人机构成了编队系统;领导者在前面,两个追随者通过领导者发出的命令跟踪领导者,以保持三角形的形成。为了在三角形成飞行期间更好地控制三个无人机,我们做出以下两个假设:假设1:在网络拓扑中,每个跟随者都可以接收来自领导者的命令,并且两个跟随者之间的通信也是正常的。此外,连接无人机的网络必须提供双向连接。假设2:领导者的运动不受跟随者的影响。此外,一个阵型的领导者与另一个阵型的领导者之间的交流是双向的。
IV 避免碰撞控制
在多无人机形成飞行期间,为了防止无人机之间以及无人机与障碍物之间的碰撞,避障控制方法尤为重要。本文采用领导者 - 跟随者策略和改进的人工势场方法同时进行 避免无人机之间以及领导者或追随者与附近障碍物之间的碰撞。
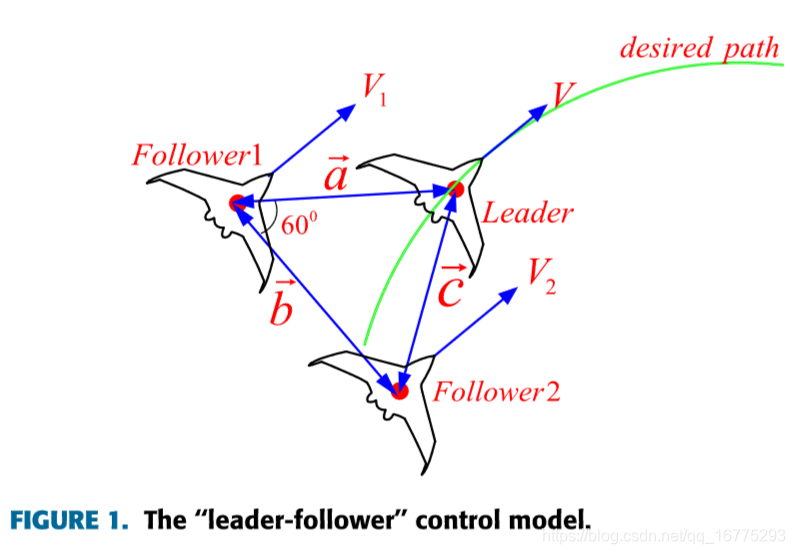
A:’‘LEADER-FOLLOWER’'控制策略
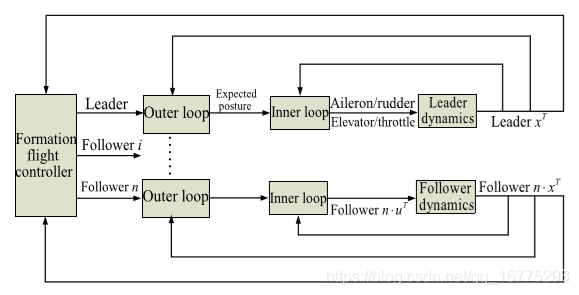
在本文中,由于其灵活性和可控性,采用了“领导者 - 跟随者”模型。 控制模型如图1所示。领导者从地面命令接收命令,而两个跟随者每个都希望保持相对于领导者的所需距离和方向。 为了减轻数据传输过载,我们采用双向网络拓扑。 在编队中,每个UAV被定义,并且它们彼此的通信是平滑的,从而有效地防止了过多的通信和多个UAV之间的数据传输拥塞的可能性。
为了更好地控制与所需飞行轨迹成一致的无人机形成,我们建议同时执行外环和内环。 外环的主要目的是应对每个UAV的姿势,前进速度和位置与所需路径之间的关系。 同时,内环接收来自外环的命令,然后生成副翼和方向舵命令,以确保无人机可以在所需的高度飞行。 基于上述讨论,详细控制图如图2所示。在此图中,状态向量xT由加速度ax,ay和az以及沿无人机车身三轴的速度p,q和r组成; 还包括三个轴上的姿态ψ,θ和φ以及地面速度u,v和w以及UAV的x,y和h位置。
B.基于人工势场的障碍物避免控制方法
在这里考虑的三角形无人机形成中,两个跟随者和领导者的相对位置具有一定的对称性。 因此,可以leader和followers都可以作为控制对象,并且相应的形成飞行碰撞避免图如图3所示。
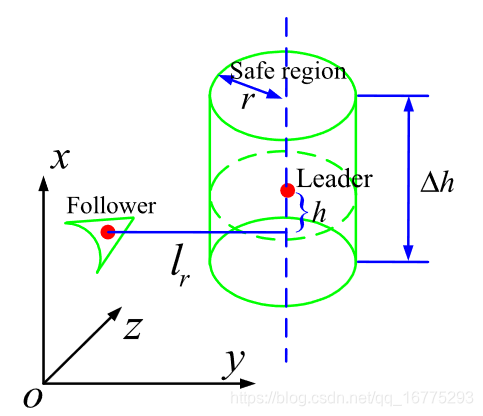
为了实现无人机之间的碰撞避免,我们为任何无人机定义了安全区域,其中以引导器的中心为中心, r r r和 △ h \bigtriangleup{h} △h分别为圆柱安全范围的半径和高度。 在无人机形成飞行期间,每个无人机可以在其各自的安全区域内飞行,并且如果无人飞行器的安全区域之间存在重叠,则它们应该采取规避行动直到消除这种重叠。 在这里,我们将 h h h和 l r l_r lr分别定义为跟随者和垂直方向上的领导者之间的相对高度以及他们在水平平面中的相对分离。 领导者和跟随者的位置之间的关系可以表示如下:

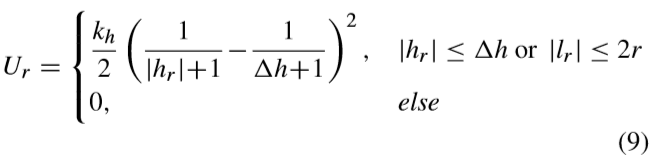
这里,符号下标r,l,f和a分别表示相对距离,引导者和跟随者以及惯性坐标系中的距离。 在本文中,我们定义了领导者和追随者之间改进的人工潜力领域,如下所示:
其中
K
h
∈
R
K_h∈R
Kh∈R是正控制参数。 随着无人机之间的垂直高度差距减小,人工潜力场减小,反之亦然。 此外,当无人机的安全区域之间没有重叠时,它们之间的人工潜力为零。
从无人机系统的网络拓扑结构[22],我们可以得到领导者和跟随者之间的平均人工潜力场如下:

来自公式(10),我们可以得到每个无人机的总人工潜力场如下:

参考文献:
- Collision Avoidance in Fixed-Wing UAV Formation Flight Based on a Consensus Control Algorithm















 819
819

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









