









环境
Ubuntu 18.04
ROS Melodic
pandarview软件安装包和ros程序
硬件
禾赛 XT32M2X 激光雷达
驱动和pandarview百度网盘下载链接
链接: https://pan.baidu.com/s/1SrauBjtu9COeMB_QbE2twQ 提取码: luib
–来自百度网盘超级会员v5的分享
建议从github上下载最新的ROS驱动包
https://github.com/HesaiTechnology/HesaiLidar_General_ROS
说明书下载链接
https://download.csdn.net/download/qq_38768959/85023927
一、配置IP
将雷达通过网线连接电脑
打开终端
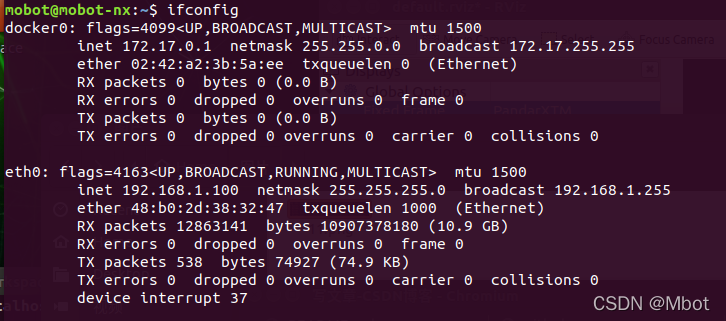
ifconfig
雷达的数据量较大,如果不知道雷达的IP是哪个,可以看下每个IP的数据的接收量,一般每秒增加十几兆左右的那个就是雷达的IP,如下图中的eth0.
用以下命令配置ip
sudo ifconfig eth0 192.168.1.100
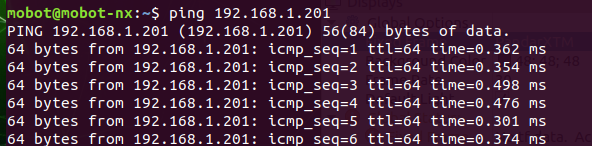
检查和雷达的通信是否成功
ping 192.168.1.201
如果成功,如下:
二、使用pandarview查看点云
下载安装包,可在网盘下载,解压后./执行下面的二进制文件即可安装
安装完成后会在home目录下生成一个PandarView_Release文件夹,如下:
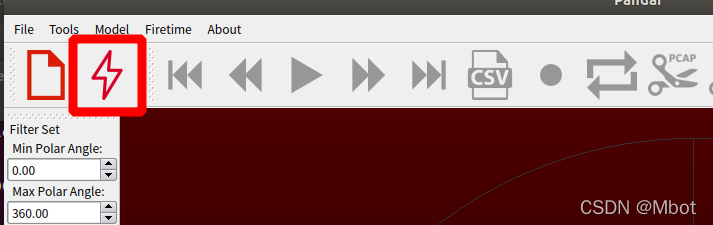
在该文件夹下./执行PandarView即可启动PandarView软件,然后点击下图图标
点击OK
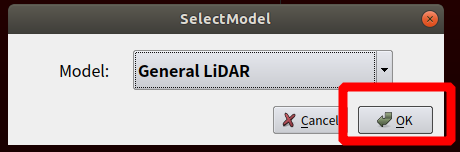
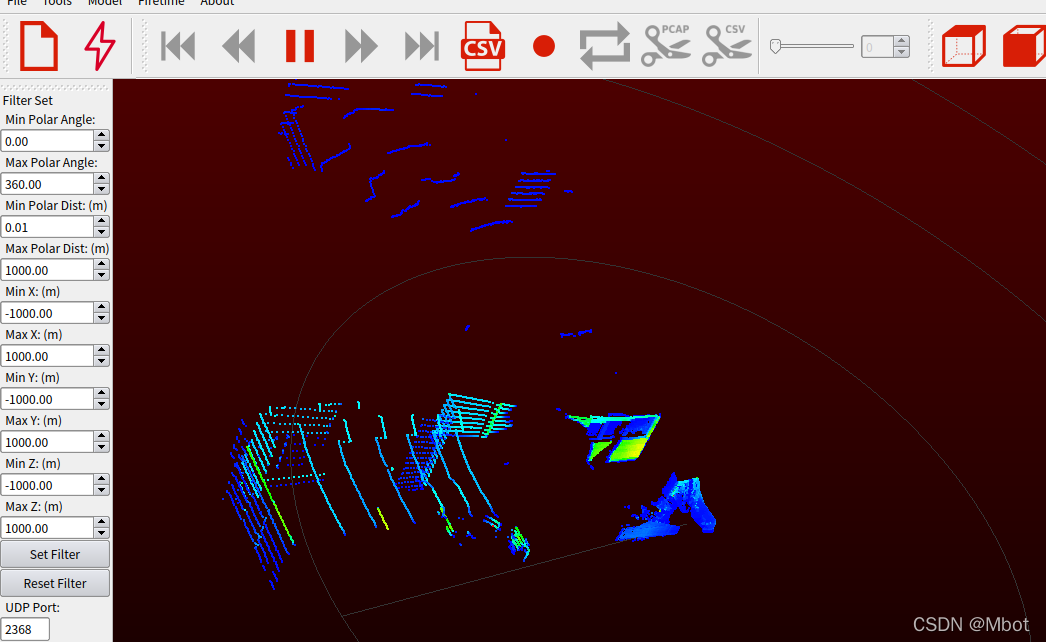
就可以看点云
三、使用RVIZ查看点云
安装环境
sudo apt install libpcap-dev libyaml-cpp-dev
sudo apt-get update
如果报错
W: An error occurred during the signature verification. The repository
is not updated and the previous index files will be used. GPG error:
http://packages.ros.org/ros/ubuntu bionic InRelease: The following
signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics
info@osrfoundation.org W: Failed to fetch
http://packages.ros.org/ros/ubuntu/dists/bionic/InRelease The
following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open
Robotics info@osrfoundation.org W: Some index files failed to
download. They have been ignored, or old ones used instead.
执行下面两条命令:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
如果报网络下载失败的错,可以把源换成清华源
执行
cd /etc/apt
sudo cp sources.list sources.list.bak
sudo gedit sources.list
更换内容为
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main universe restricted
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main universe restricted
如果报错
E: GPG error: file:/var/visionworks-repo Release: Signed file isn’t
valid, got ‘NODATA’ (does the network require authentication?) E: GPG
error: file:/var/visionworks-sfm-repo Release: Signed file isn’t
valid, got ‘NODATA’ (does the network require authentication?) E: GPG
error: file:/var/visionworks-tracking-repo Release: Signed file isn’t
valid, got ‘NODATA’ (does the network require authentication?)
执行
sudo rm /etc/apt/sources.list.d/***.list
sudo apt-get update -y
然后再执行sudo apt-get update
如果没问题然后继续执行
sudo apt-get install python-catkin-tools
mkdir -p rosworkspace/src
cd rosworkspace/src
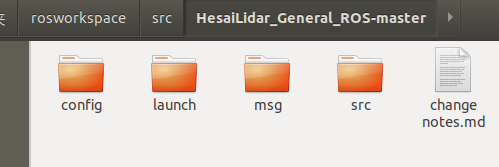
将ROS包放到src目录下,我这里用的1.1.12版本的,可在网盘或github下载.如下:
cd到rosworkspace目录下
cd ..
编译
catkin_make -DCMAKE_BUILD_TYPE=Release
如果编译过程中报错
No rule to make target
‘usr/lib/aarch64-linux-gnu/libvtkGUISupportQtWebkit-6.3.so.6.3.0’,
needed by ‘…’. Stop.
原因是libvtkGUISupportQtWebkit-6.3.so.6.3.0失去了目标链接库,重新建立链接即可。
执行
sudo ln -s /usr/lib/aarch64-linux-gnu/libvtkCommonCore-6.3.so /usr/lib/aarch64-linux-gnu/libvtkGUISupportQtWebkit-6.3.so.6.3.0
然后继续编译,编译成功后执行
source devel/setup.bash
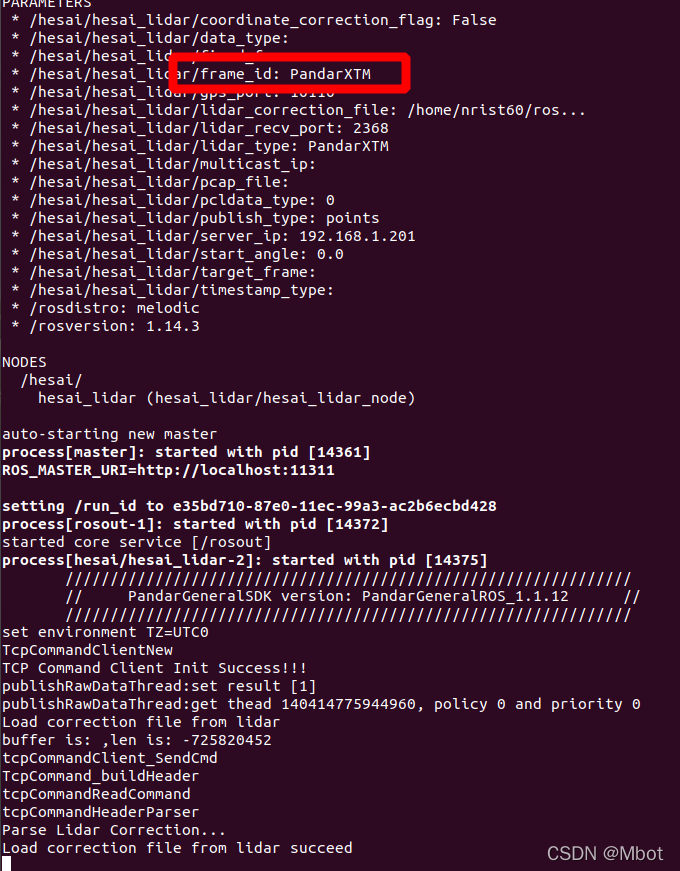
roslaunch hesai_lidar hesai_lidar.launch lidar_type:="PandarXTM" frame_id:="PandarXTM"
执行成功后如下:
打开rviz:
rviz
添加话题
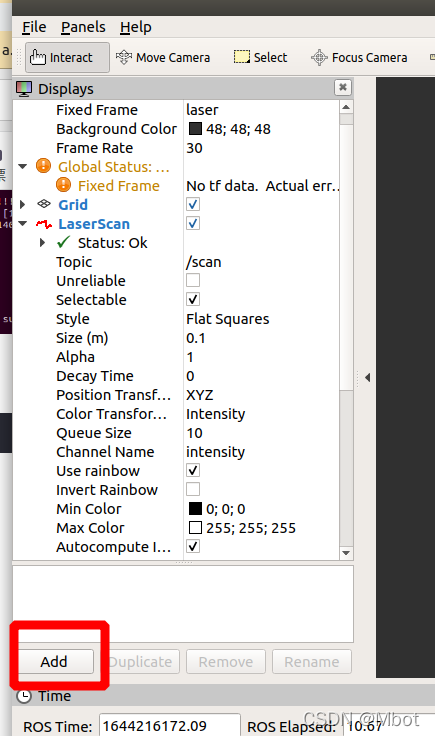
双击PointCloud2

将Fixed Frame改成之前启动launch文件后终端上显示的/hesai/hesai_lidar/frame_id
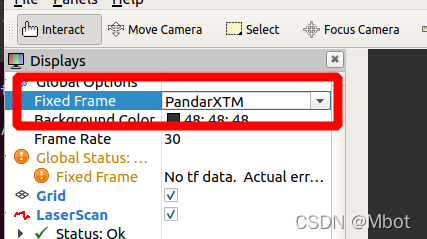
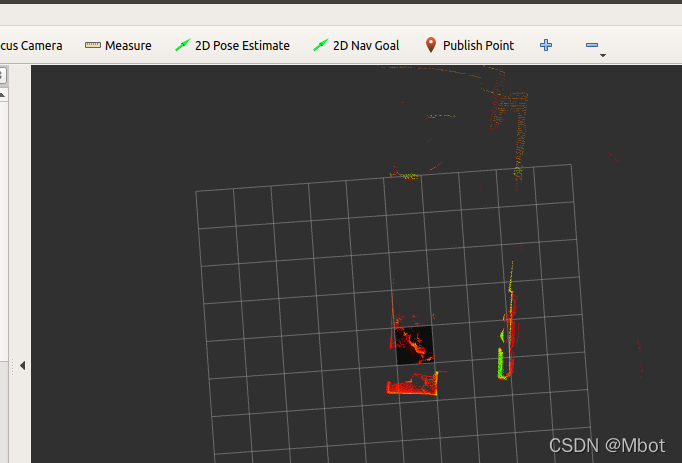
即可看到雷达的三维点云
四、网页控制
按照前面正确设置IP后,输入网址:192.168.1.201
就可以通过网页进行设置



















 2542
2542

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











