






代码格式
ROS_INFO_STREAM("\033[30m 黑色字 \033[0m");
ROS_INFO_STREAM("\033[31m 红色字 \033[0m");
ROS_INFO_STREAM("\033[32m 绿色字 \033[0m");
ROS_INFO_STREAM("\033[33m 黄色字 \033[0m");
ROS_INFO_STREAM("\033[34m 蓝色字 \033[0m");
ROS_INFO_STREAM("\033[36m 天蓝字 \033[0m");
ROS_INFO_STREAM("\033[37m 白色字 \033[0m");
ROS_INFO_STREAM("\033[40;37m 黑底白字 \033[0m");
ROS_INFO_STREAM("\033[41;37m 红底白字 \033[0m");
ROS_INFO_STREAM("\033[42;37m 绿底白字 \033[0m");
ROS_INFO_STREAM("\033[47;30m 白底黑字 \033[0m");
ROS_INFO_STREAM("\033[43;37m 黄底白字 \033[0m");
ROS_INFO_STREAM("\033[44;37m 蓝底白字 \033[0m");
ROS_INFO_STREAM("\033[45;37m 紫底白字 \033[0m");
ROS_INFO_STREAM("\033[46;37m 天蓝底白字 \033[0m");
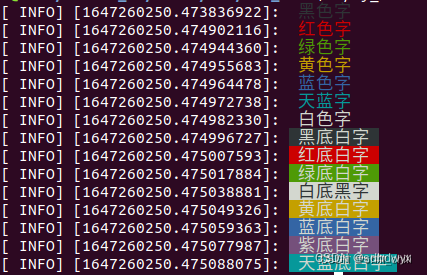
输出效果
其他指令
\033[0m 关闭所有属性
\033[1m 设置高亮度
\033[4m 下划线
\033[5m 闪烁
\033[7m 反显
\033[8m 消隐
\033[30m -- \33[37m 设置前景色
\033[40m -- \33[47m 设置背景色
\033[nA 光标上移n行
\033[nB 光标下移n行
\033[nC 光标右移n行
\033[nD 光标左移n行
\033[y;xH设置光标位置
\033[2J 清屏
\033[K 清除从光标到行尾的内容
\033[s 保存光标位置
\033[u 恢复光标位置
\033[?25l 隐藏光标
\033[?25h 显示光标
REF:https://blog.csdn.net/chill_chill/article/details/123485949
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











