






介绍
moveit框架包含感知(perception)模块,它可以将深度相机采集的点云或深度图转换成OctoMap(八叉树地图),用rviz可以显示Octomap,并且采用Octomap进行避障轨迹规划。感知周围环境对于机械臂来说非常重要,有很多实际的应用场景,比如非结构环境下的机械臂运动等等。
实现教程(Ros-Noetic版本)
参考moveit官方教程perception。
1、修改sensors_3d.yaml文件
打开moveit配置文件夹xxx_config/sensors_3d.yaml文件,该文件默认是空的,需要填入如下的信息:
# The name of this file shouldn't be changed, or else the Setup Assistant won't detect it
sensors:
- sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater
point_cloud_topic: /camera/depth/color/points
#sensor_plugin: occupancy_map_monitor/DepthImageOctomapUpdater
#image_topic: /camera/depth/image_rect_raw
queue_size: 5
max_range: 1.0
max_update_rate: 0.6
near_clipping_plane_distance: 0.3
far_clipping_plane_distance: 0.8
shadow_threshold: 0.2
padding_scale: 4.0
padding_offset: 0.03
filtered_cloud_topic: filtered_cloud
ns: realsensesensor_plugin:加载用于更新Octomap的插件。如果你使用的是点云数据用蓝色;如果你使用的是深度信息数据用黄色。
a、sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater
point_cloud_topic: /camera/depth/color/points
b、sensor_plugin: occupancy_map_monitor/DepthImageOctomapUpdater
image_topic: /camera/depth/image_rect_raw
一些比较重要参数的说明:
| max_range | 生成的Octomap距离原点的最大范围,单位m |
| point_subsample | 如果是1,则不进行下采样,如果设为2,则删除掉一般的点 |
| max_update_rate | Octomap更新速率,Octomap不能更新太快,否则会导致系统卡顿,单位s |
| filtered_cloud_topic | 删除位于机器人内部的点云,保留剩余的的点云,发布的点云话题 |
2、修改sensor_manager.launch.xml文件
打开moveit配置文件夹launch/sensor_manager.launch.xml文件,该文件其实就是加载刚才配置的sensors_3d.yaml文件。需要填入如下的信息:
<launch>
<!-- This file makes it easy to include the settings for sensor managers -->
<!-- Params for 3D sensors config -->
<rosparam command="load" file="$(find rml_63_moveit_config)/config/sensors_3d.yaml"/>
<!-- Params for the octomap monitor -->
<param name="camera_color_optical_frame" type="string" value="camera_color_optical_frame"/>
<!-- <param name="octomap_frame" type="string" value="camera_depth_optical_frame" /> -->
<param name="octomap_resolution" type="double" value="0.045"/>
<param name="max_range" type="double" value="1.0"/>
<!-- Load the robot specific sensor manager; this sets the moveit_sensor_manager ROS parameter -->
<arg name="moveit_sensor_manager" default="rml_63_description"/>
<include file="$(find rml_63_moveit_config)/launch/$(arg moveit_sensor_manager)_moveit_sensor_manager.launch.xml"/>
</launch>一些比较重要参数的说明:
| octomap_frame | octomap地图的坐标系 |
| octomap_resolution | 生成的octomap地图的分辨率,及每个小方格的大小 |
3、启动相机和机械臂launch文件
注意:在运行机械臂启动demo.launch文件前,在launch文件里面需要添加机械臂的base_link和octomap地图的坐标变换关系。
<!-- If needed, broadcast static tf for robot root -->
<node pkg="tf2_ros" type="static_transform_publisher" name="to_robot" args="0 0 0 0 0 0 world base_link" />
<node pkg="tf2_ros" type="static_transform_publisher" name="to_camera" args="0.00 -0.40 0.60 0.19 0.07 -1.91 camera_color_optical_frame world" />
然后运行moveit配置文件夹中launch/demo.launch,rviz会打开并显示机械臂和Octomap, 如下图所示:
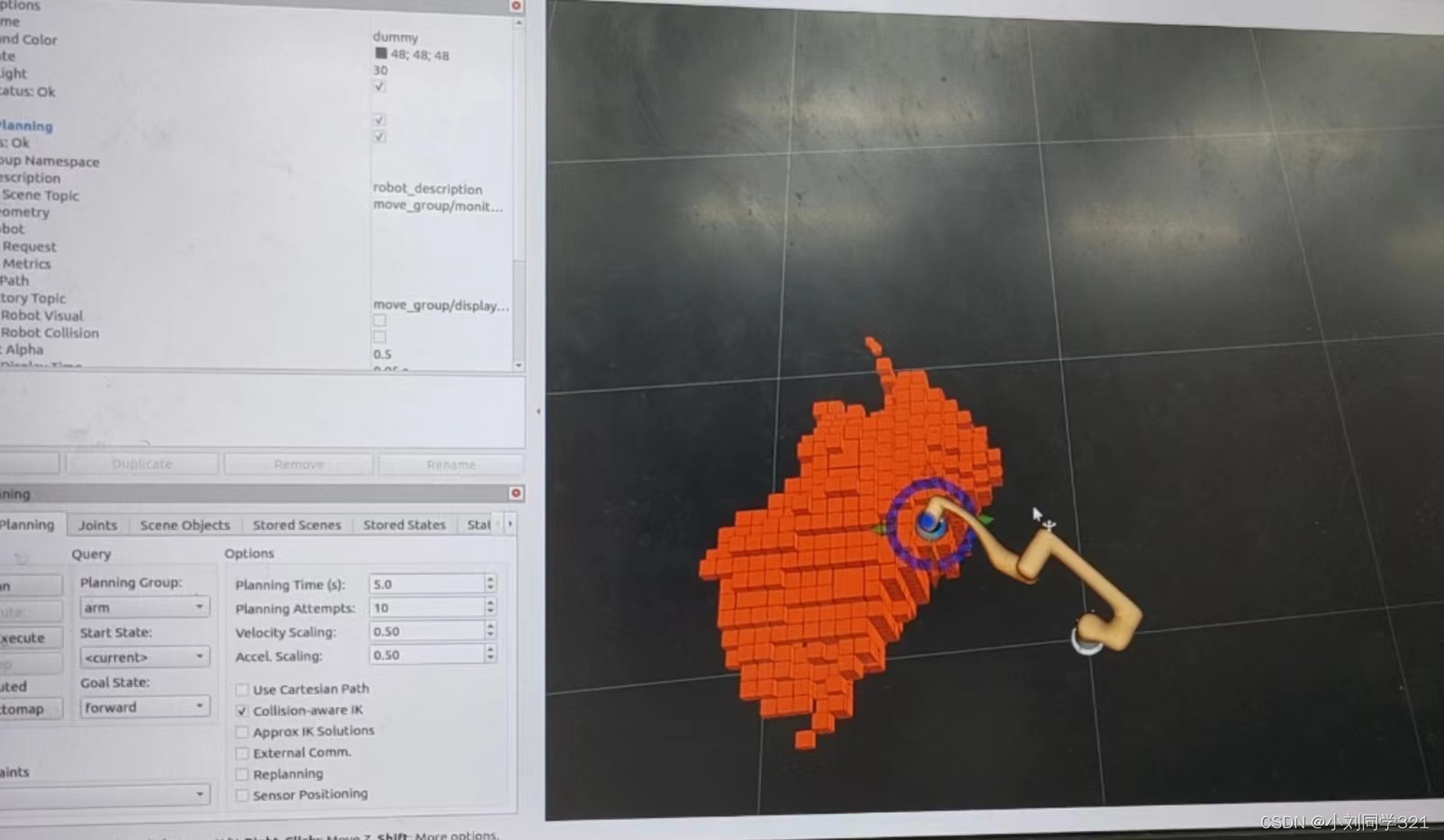
可以看出生成的octomap地图质量不是很好,需要我们进行滤波、去噪等处理去完善octomap的质量,这样才能让机械臂达到更好的规划效果。


















 901
901

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









