







本文的仿真场景资源下载地址:
https://download.csdn.net/download/sinat_39153249/12505915
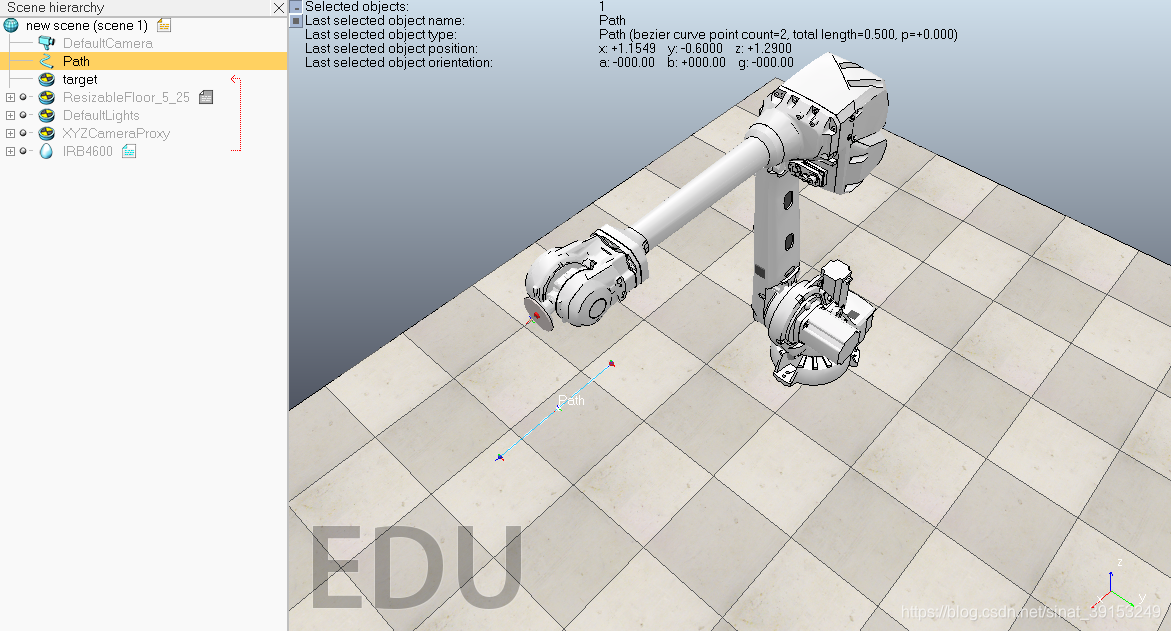
在建立好逆运动学的基础上,设置path就能使机器人沿path运动。
沿path运动步骤
1.添加一个path。可以添加直线或者闭合path,这里添加直线。
2.将path移动到期望位置。
3.添加代码
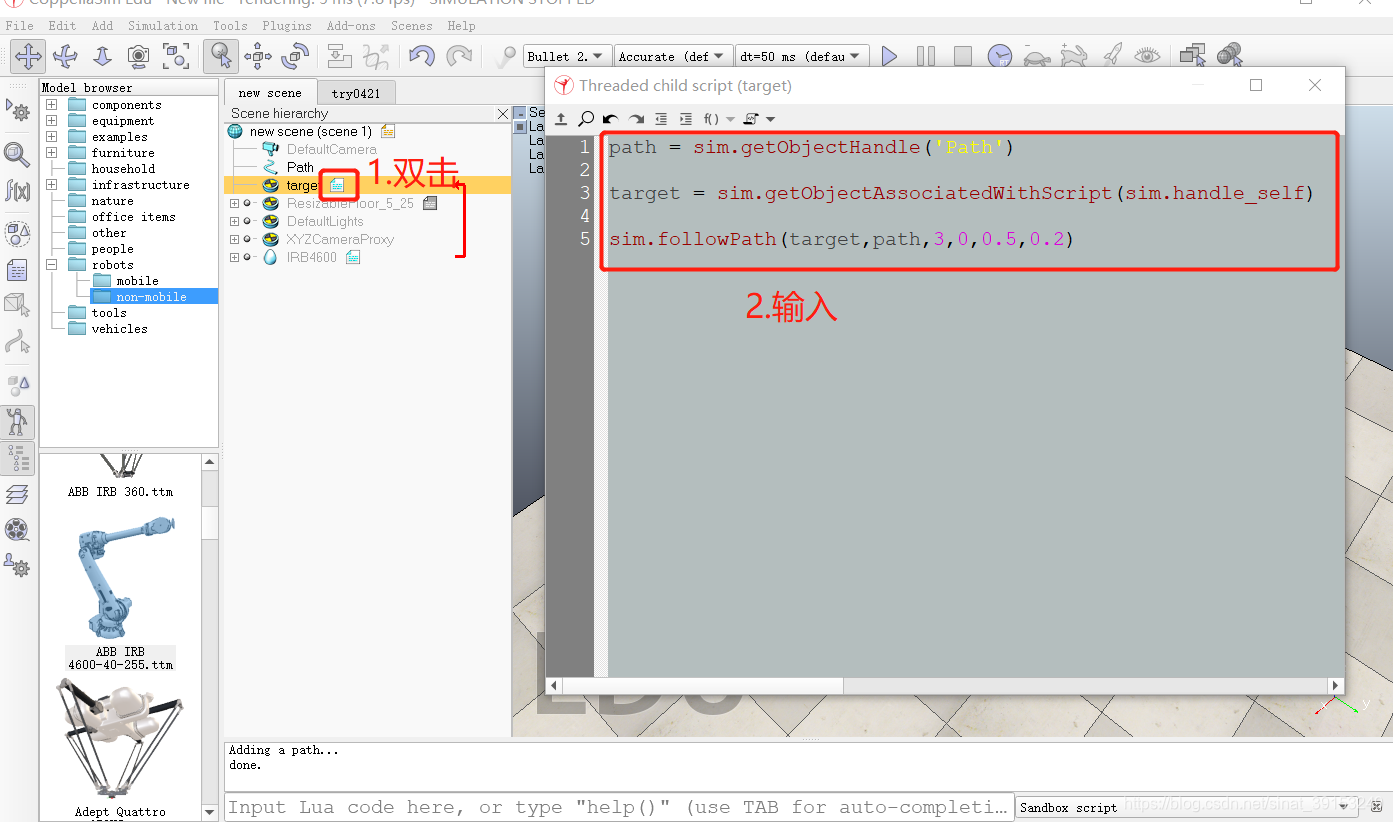
代码如下
path = sim.getObjectHandle('Path')
target = sim.getObjectAssociatedWithScrip 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8897
8897

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









