







架空输电线巡检机器人轨迹优化
摘要
本论文针对架空输电线巡检机器人的轨迹优化问题展开研究,综合考虑输电线复杂环境、机器人运动特性及巡检任务需求,结合路径规划算法、智能优化算法与机器人动力学约束,构建了多目标轨迹优化模型。通过改进遗传算法与模拟退火算法,有效解决传统算法在复杂环境下易陷入局部最优、计算效率低等问题,实现巡检路径最短、时间最少、能耗最低的优化目标,提升巡检效率与可靠性,为架空输电线巡检机器人的高效应用提供理论与技术支撑。
关键词
架空输电线;巡检机器人;轨迹优化;路径规划;智能算法
一、引言
1.1 研究背景
随着电力系统规模不断扩大,架空输电线作为电能传输的关键通道,其安全稳定运行至关重要。然而,长期暴露在复杂自然环境中的输电线,易受雷击、大风、冰雪、腐蚀等因素影响,导致线路故障频发。传统人工巡检方式存在效率低、劳动强度大、安全风险高、受环境限制大等问题,难以满足日益增长的电力巡检需求。巡检机器人凭借自动化、智能化优势,可实现对架空输电线的高效、精准巡检,成为保障输电线路安全运行的重要发展方向。而合理的轨迹规划是巡检机器人高效完成任务的核心环节,直接影响巡检质量与效率。
1.2 研究目的与意义
本研究旨在通过对架空输电线巡检机器人轨迹进行优化,解决现有巡检机器人在轨迹规划过程中存在的路径冗余、巡检时间长、能耗高、对复杂环境适应性差等问题,提高巡检机器人的工作效率与可靠性,降低运维成本,为电力系统安全稳定运行提供有力保障,推动电力巡检智能化发展。
1.3 国内外研究现状
在国外,巡检机器人轨迹优化研究起步较早。早期多采用传统路径规划算法,如 Dijkstra 算法、A * 算法等,这些算法能够在简单环境中找到较优路径,但在复杂架空输电线环境下,计算复杂度高、效率低,难以满足实时性要求。近年来,智能优化算法逐渐应用于巡检机器人轨迹优化,如遗传算法、粒子群优化算法等,通过模拟生物进化或群体智能行为,在复杂环境中搜索较优解,但仍存在易陷入局部最优、收敛速度慢等问题。
在国内,随着机器人技术与智能算法的发展,架空输电线巡检机器人轨迹优化研究取得了一定成果。学者们在改进传统算法、融合多种智能算法方面进行了诸多探索,例如将遗传算法与模拟退火算法结合,提高算法的全局搜索能力;利用深度学习技术对环境进行建模,实现机器人轨迹的自适应规划。然而,目前研究在综合考虑机器人动力学约束、复杂多变环境因素以及多目标优化等方面仍有待进一步完善。
二、架空输电线巡检机器人工作环境与任务分析
2.1 工作环境特点
架空输电线分布广泛,穿越不同地形地貌,包括山区、平原、丘陵、河流等。在山区,线路多架设在陡峭的山峰与峡谷之间,地形起伏大,巡检机器人需跨越复杂地形;在平原地区,可能面临农田、道路等障碍物。此外,输电线周边环境还受到自然气象条件的影响,如强风、暴雨、冰雪、高温等。强风可能导致机器人姿态不稳定,冰雪会增加线路重量与巡检难度,高温可能影响机器人电子元件性能。同时,输电线自身结构复杂,存在杆塔、绝缘子、线夹、防震锤等多种设备与部件,这些都增加了巡检机器人轨迹规划的难度。
2.2 巡检任务需求
巡检机器人的主要任务是对架空输电线及其附属设备进行全面检测,及时发现线路缺陷、故障隐患等问题。具体包括检测导线的断股、磨损、腐蚀情况,检查绝缘子的破损、闪络、污秽程度,监测杆塔的倾斜、基础沉降状况,以及检测各类连接部件的松动、锈蚀等。为确保巡检的准确性与完整性,机器人需按照一定的顺序和精度要求对各个检测点进行检测,同时要在规定时间内完成巡检任务,以提高巡检效率,降低因巡检时间过长对电力系统运行造成的影响。此外,还需考虑机器人的能耗问题,避免因能耗过高导致巡检任务无法完成或增加运维成本。
三、巡检机器人轨迹优化模型构建
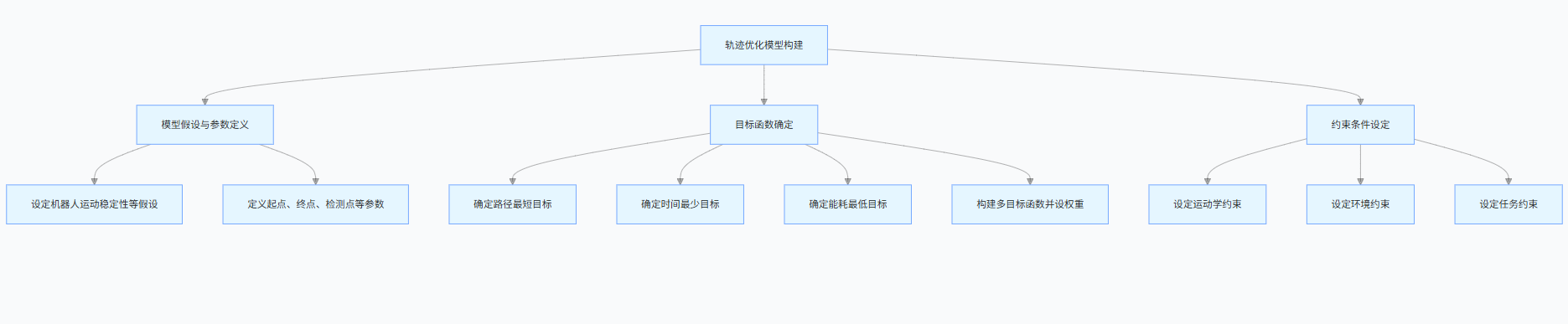
3.1 模型假设与参数定义
为简化问题,做出以下假设:
巡检机器人在运动过程中始终保持稳定,不考虑因外界干扰导致的意外掉落或故障。
忽略机器人在启动、停止瞬间的短暂动态过程,将其运动视为连续的匀速或匀加速运动。
假设环境信息已知且在巡检过程中保持不变,不考虑实时动态变化的环境因素,如突发气象变化、临时障碍物等。
定义相关参数:设巡检机器人的起点为 S S S,终点为 E E E,巡检路径上的检测点集合为 P = { P 1 , P 2 , ⋯ , P n } P = \{P_1, P_2, \cdots, P_n\} P={P1,P2,⋯,Pn} ;机器人在相邻检测点间运动涉及距离、时间、速度等参数;机器人能耗与运动相关;明确总路径长度、总巡检时间、总能耗等概念 。
3.2 目标函数确定
确定轨迹优化的三大目标:路径最短、时间最少、能耗最低。路径最短可减少机器人运动距离,进而降低时间与能耗;时间最少能保障及时发现线路故障;能耗最低有助于延长机器人工作时间、降低运维成本。综合这三个目标构建多目标函数,根据实际需求调整各目标权重,以平衡不同目标的重要性。
3.3 约束条件设定
运动学约束:机器人运动速度和加速度存在上限,在相邻检测点间运动时速度变化需满足加速度限制 ,确保机器人运动安全稳定。
环境约束:巡检路径必须避开树木、建筑物、山体等障碍物,同时要在输电线及其附属设备可操作范围内,防止与杆塔、绝缘子等部件发生碰撞。
任务约束:机器人需按规定顺序检测所有点,且在每个检测点的停留时间要满足检测精度要求,保证巡检任务的完整性和准确性。
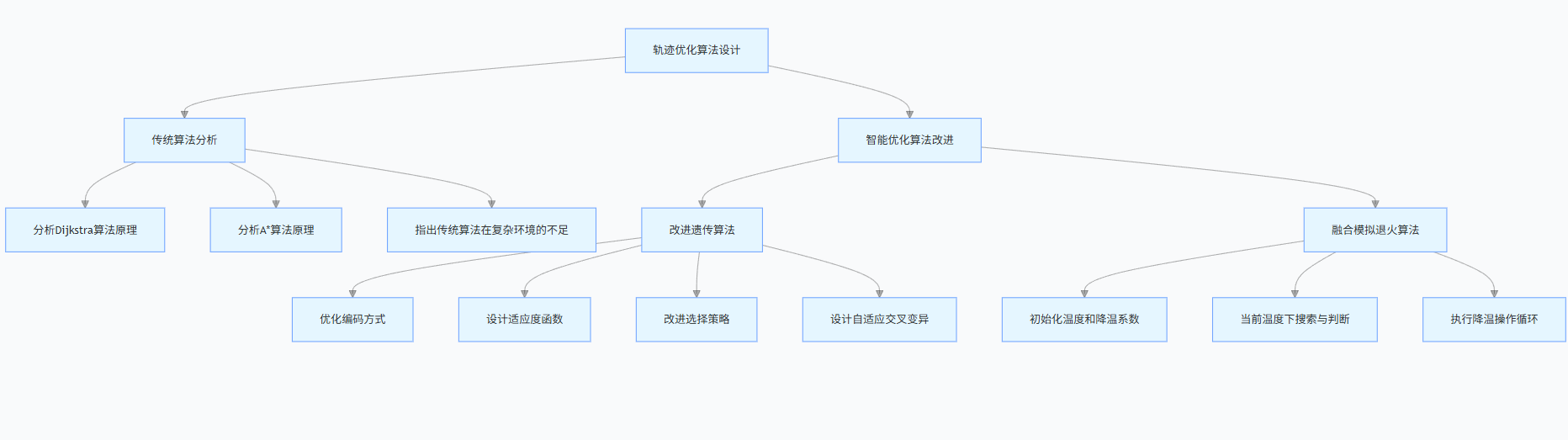
四、轨迹优化算法设计
4.1 传统算法分析
传统路径规划算法如 Dijkstra 算法和 A算法,在简单环境下能找到较优路径。Dijkstra 算法从起点逐步扩展,选择距离起点最近节点探索;A算法引入启发式函数引导搜索。但在架空输电线复杂环境中,因障碍物多、地形复杂,这些算法计算复杂度高、效率低,且通常只能解决单目标规划问题,无法满足多目标优化需求。
4.2 智能优化算法改进
4.2.1 改进遗传算法
针对传统遗传算法在轨迹优化中易陷入局部最优、收敛慢的问题进行改进:
编码方式优化:采用实数编码,将机器人运动路径和速度参数编码为实数向量,提高编码效率和搜索能力。
适应度函数设计:以多目标函数作为适应度函数,引入惩罚函数处理违反约束条件的个体。
选择策略改进:采用锦标赛选择法,从种群中选取个体竞争,选择适应度高的个体进入下一代,提高种群多样性。
交叉与变异操作:设计自适应交叉和变异概率,算法初期加快收敛,后期避免陷入局部最优。
4.2.2 模拟退火算法融合
将改进遗传算法与模拟退火算法融合:
初始化温度 T 0 T_0 T0 和降温系数 α \alpha α,高初始温度扩大搜索范围,降温系数控制温度下降速度。
在当前温度 T T T 下,对遗传算法得到的最优个体进行邻域搜索生成新个体,根据目标函数差值和概率决定是否接受新个体。
按降温公式降低温度,重复搜索过程直至达到终止温度。
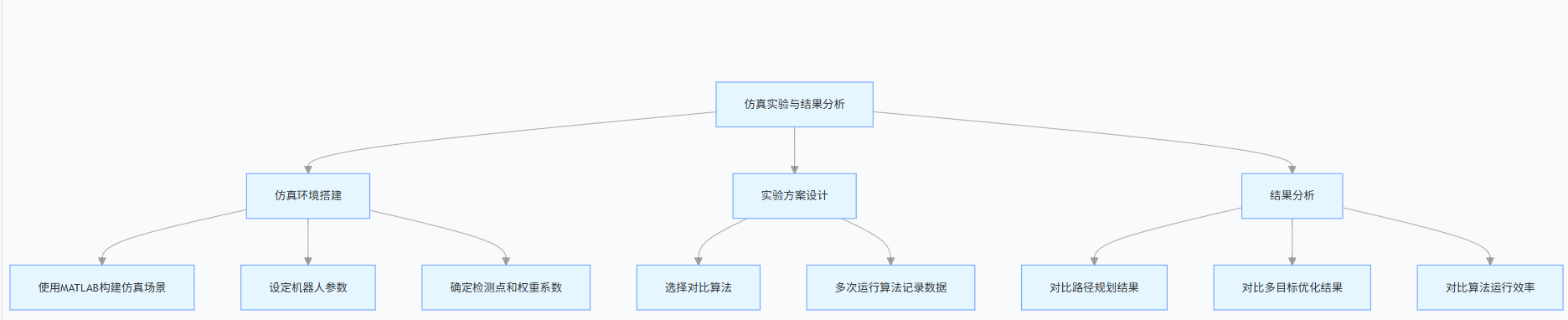
五、仿真实验与结果分析
5.1 仿真环境搭建
利用 MATLAB 软件搭建仿真平台,依据架空输电线实际环境构建包含不同地形地貌(山区、平原)、障碍物(树木、建筑物)、输电线结构(杆塔、绝缘子)的场景。设定机器人最大速度、最大加速度等参数,明确检测点位置和停留时间,确定多目标函数权重系数。
5.2 实验方案设计
设计对比实验,分别采用传统 A * 算法、未改进的遗传算法、改进遗传算法以及改进遗传算法与模拟退火算法融合的改进融合算法,对巡检机器人轨迹进行优化。在每个仿真场景下多次运行算法,记录路径长度、巡检时间、能耗和算法运行时间等数据。
5.3 结果分析
路径规划结果对比:传统 A * 算法在复杂环境下路径长、冗余多;未改进遗传算法路径存在不理想情况;改进遗传算法和改进融合算法能找到更短路径,改进融合算法效果最佳。
多目标优化结果对比:改进融合算法在路径最短、时间最少、能耗最低三个目标上表现最优,能更好平衡多目标关系。
算法运行效率对比:传统 A * 算法计算复杂度高,环境越复杂运行时间越长;未改进遗传算法处理大规模问题耗时久;改进遗传算法提高了运行效率;改进融合算法虽因模拟退火操作运行时间略长,但优化结果优势明显,综合性能更优。
六、结论与展望
6.1 研究结论
构建的多目标轨迹优化模型全面反映巡检机器人工作需求,为轨迹优化提供合理数学描述。
改进的遗传算法通过多方面优化,提高全局搜索和收敛能力,避免陷入局部最优。
改进遗传算法与模拟退火算法融合,增强全局搜索能力,在多目标优化上表现更优,提升巡检效率和可靠性。
6.2 研究展望
结合传感器和实时数据处理,将动态环境因素纳入轨迹优化模型,实现实时自适应调整。
探索深度学习与强化学习在轨迹优化中的应用,提高机器人对复杂环境的自主决策能力。
考虑多机器人协同巡检的轨迹优化问题,进一步提高巡检效率和覆盖范围 。



















 2075
2075

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











