






电动机的设计选型-----动力系统参数概念
1 电池相关概念
1.1 电池电压
电池串并联:S----代表串联,P------并联;一般组合如3S1P代表3节锂电池串联,电压是3*3.7=11.1V;2S2P代表两节串联,然后两个这样的串联结构并联,所以总电压是2*3.7=7.4V,总电流是单个电池的两倍;
1.2 电池容量
一般是5000mAH,指的是在放电电流为5000ma时,可连续工作1H;一般在检测电池的容量时有两种方法:一种是检测电池单节电压,另一种方式是实时检测电池输出电流,然后在做积分。
1.3 放电倍率
一般充放电电流的大小常用放电倍率来表示;即:
充放电倍率 = 充放电电流/额定容量;
放电倍率单位----C,充放电电流-----A,额定容量时AH;
1.4 内阻
内阻越小,放电能力也越强;内阻随电池密度的对数增大而线性增加;
1.5 能量密度:
指在一定的空间或质量中储存能量的大小;
2 螺旋桨参数指标
2.1 型号
螺旋桨一般用4个数字表示,其前两位是螺旋桨的直径,后两位是螺旋桨的螺距。比如:APC 1045(10*45)桨的直径为10英寸,而螺距为4.5英寸。
螺距或桨距:螺旋桨在一种不能流动的介质中旋转,那么螺旋桨每转一圈,就会前进一个距离,这个距离就成为螺距或桨距;
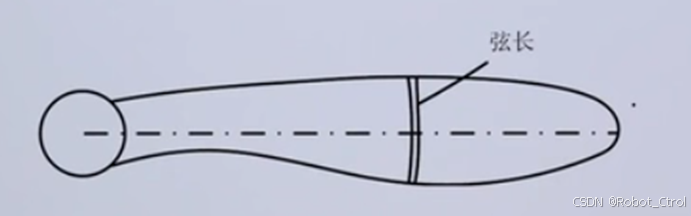
2.2 弦长
一般选择螺旋桨半径2/3处的弦长作为螺旋桨的标准弦长;
2.3 转动惯量
较小的转动惯量可以提升电机的响应速度,从而提升多旋翼的性能;
2.4 桨叶数
实验表明,二叶桨的力效会比三叶桨效率稍高一些,相同拉力条件下二叶桨比三叶桨尺寸大;
2.5 安全转速
转速过高会导致螺旋桨变形,效率降低;
2.6 螺旋桨力效
机械功率(单位:W)= 输出力矩(单位:Nm)X 螺旋桨转速(rad/s)
力效(单位:g/W)= 拉力(g)/ 机械功率(W)
2.7 螺旋桨的静平衡和动平衡
进行静平衡和动平衡的目的是减少振动。
螺旋桨静平衡----是指螺旋桨重心与轴心线重合时的平衡状态,能够保证螺旋桨置于平衡器上,在任何角度都能自行静止;
螺旋桨动平衡----是指螺旋桨重心与惯性重心重合时的平衡状态,在旋转时不产生偏心力;
3 电机指标参数
3.1 尺寸
电机尺寸取决于定子的大小,由一个四位数字来表示。比如2205(或写成22x05)电机,前面两个数字代表定子的直径(单位:mm),后两个数字代表高度(单位:mm),因此2205电机表示电机定子直径是22mm,定子高度是5mm。
3.2 标称空载KV值
无刷直流电机的KV值指的是空载情况下,外加1V电压得到的电机转速值(单位:RPM)。KV值越小可以产生较大的力矩,因此大型螺旋桨可以选择KV值较小的电机,而小型螺旋桨可以用KV值较大的电机。
3.3 标称空载电流和电压
在空载(不带螺旋桨)实验中,对电机施加空载电压(通常选择10V)时测得的电机电流被称为空载电流;
3.4 最大电流/功率
最大峰值(瞬时)电流/功率:电机能承受最大瞬时通过的电流/功率。
最大连续(持续)电流/功率:电机能允许持续工作(规定时间)而不烧坏的最大持续电流/功率。
3.5 内阻
电机电枢本身存在内阻,虽然内阻很小,但是由于电机电流很大有时甚至可达几十安倍,所以该小电阻不和忽略。
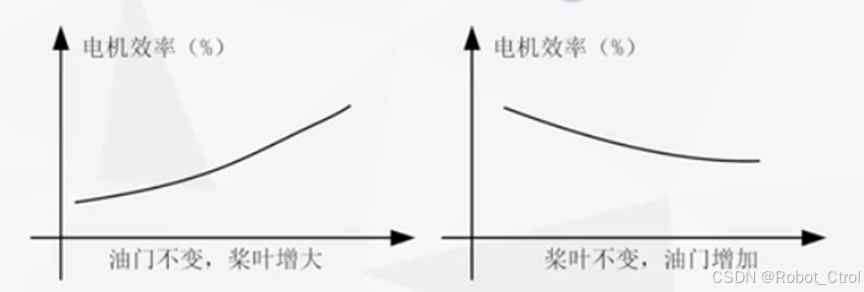
3.6 电机效率
是评估电机性能的一个重要参数
电功率(W)= 电机输入电压(V)x 电机电流(A)
电机效率 = 机械功率(W)/ 电功率(W);
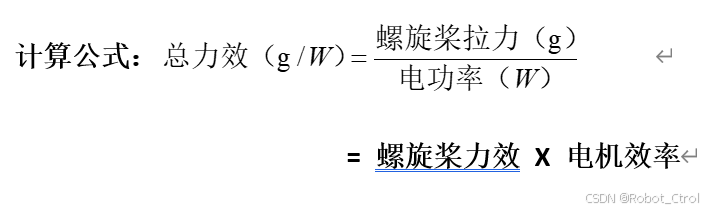
3.7 总力效
4 电调:电子调速器(ESC)
4.1 作用
- 电调最基本的作用就是电机调速;
- 为遥控器接收器上其它通道的舵机供电;
- 充当换相器角色;
- 电调其它一些辅助功能比如电启动、电池保护、刹车。
4.2 电调参数:
- 最大持续/峰值电流:无刷电调最主要的参数时电调的功率,通常以安数A来表示,如10A、20A。不同电机需要配备不同安数的电调,安数不足会导致电调甚至电机烧毁。
- 电压范围:电调能够正常工作所允许输入的电压范围也是非常重要的一个参数;
- 内阻:大规格电调内阻一般比较小;
- 刷新频率:
- 可编程特性:可以通过软件设置电调参数。
- 兼容性
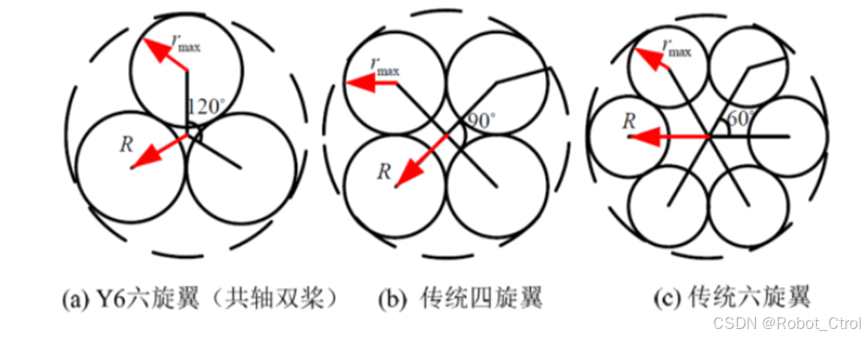
5 多旋翼的旋翼半径和机架半径关系
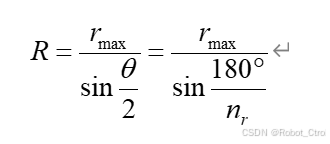
上式中的R-------机架的半径
rmax -----旋翼桨叶的最大半径,一般为桨叶半径的1.05---1.2倍之
即 ![]()
θ --------多旋翼相邻机臂的夹角
nr --------多旋翼机臂数

















 3516
3516

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









